Download as ppt, pdf, or txt
You might also like
- BB AD PreparationDocument5 pagesBB AD PreparationMd. Golam Rabbani88% (8)
- ALSTOM Instntneous Voltage Relay VAGM HighResDocument4 pagesALSTOM Instntneous Voltage Relay VAGM HighResMorgan Brooks0% (1)
- Chapter 03Document72 pagesChapter 03Truc DinhNo ratings yet
- CH 04Document62 pagesCH 04emineNo ratings yet
- ME 121: Engineering MechanicsDocument45 pagesME 121: Engineering MechanicsMuhammad FahadNo ratings yet
- MAE 241 - Lec5Document18 pagesMAE 241 - Lec5kostas.sierros9374No ratings yet
- Chap 4 (Part Ii)Document35 pagesChap 4 (Part Ii)isharin kNo ratings yet
- MOMENT My LecDocument37 pagesMOMENT My LecAbu ShayedNo ratings yet
- Chapter 3-Moment and CouplesDocument45 pagesChapter 3-Moment and CouplesIsabelNo ratings yet
- Force System ResultantsDocument56 pagesForce System ResultantsTakunda T. NgorimaNo ratings yet
- VectorsDocument41 pagesVectorsMastura Ahmad Termizi0% (1)
- Chapter3 MomentandcouplesDocument45 pagesChapter3 Momentandcouplesmuhammad adnielNo ratings yet
- Engineering Mechanics: Statics: Force System ResultantsDocument193 pagesEngineering Mechanics: Statics: Force System ResultantsVC Chua Yee LeongNo ratings yet
- Week 1. Analysis of ForcesDocument56 pagesWeek 1. Analysis of Forcespauline aerielNo ratings yet
- Module 3 MomentDocument48 pagesModule 3 MomentKiel JohnNo ratings yet
- Statics Chapter 4Document11 pagesStatics Chapter 4aniceto labianNo ratings yet
- Chapter 4 Force System Resultant - 0Document47 pagesChapter 4 Force System Resultant - 0KhalilluqmanNo ratings yet
- MOMENT My LecDocument38 pagesMOMENT My LecSabbir AhammedNo ratings yet
- Chapter - 04 (Compatibility Mode)Document46 pagesChapter - 04 (Compatibility Mode)mrjose28678No ratings yet
- Chapter 3 - 3 - Equivalent System of Forces For Rigid Bodies PDFDocument26 pagesChapter 3 - 3 - Equivalent System of Forces For Rigid Bodies PDFecercNo ratings yet
- Engineering Mechanics: Statics in SI Units, 12e: Force System ResultantsDocument28 pagesEngineering Mechanics: Statics in SI Units, 12e: Force System ResultantsMei GuanNo ratings yet
- CH 4 Force System ResultantDocument50 pagesCH 4 Force System ResultantSyahrul Nizam AnuarNo ratings yet
- Bahan Ajar - Ptm117 Mekanika TeknikDocument141 pagesBahan Ajar - Ptm117 Mekanika Teknikariefz45100% (3)
- FME - CH03 - Rigid Bodies - Equilibrium System of ForcesDocument47 pagesFME - CH03 - Rigid Bodies - Equilibrium System of Forcesআবু সাঈদ সায়েমNo ratings yet
- Chapter 3 Moment and CouplesDocument45 pagesChapter 3 Moment and CouplesMihir Kumar MechNo ratings yet
- Mec30: Statics of Rigid Bodies: By: Engr. Lamberto B. Marcial, JRDocument31 pagesMec30: Statics of Rigid Bodies: By: Engr. Lamberto B. Marcial, JRKobiiNo ratings yet
- Lecture 4 Chapter 2 - Force Systems 3DDocument32 pagesLecture 4 Chapter 2 - Force Systems 3Drobel metikuNo ratings yet
- Chap. 4 Force System ResultantDocument127 pagesChap. 4 Force System ResultantNOMAD TVNo ratings yet
- Lec4Statics Moment of A Forcepptx 1Document54 pagesLec4Statics Moment of A Forcepptx 1Jared RoseNo ratings yet
- CH 4Document62 pagesCH 4zyxtxyzNo ratings yet
- Statics, Lecture Notes, Chapter 4Document114 pagesStatics, Lecture Notes, Chapter 4RayanNo ratings yet
- STATIC NOTES Notes 3Document59 pagesSTATIC NOTES Notes 3nfatihahNo ratings yet
- 2MEKTEK D4PhianDocument45 pages2MEKTEK D4PhianThunder BoltNo ratings yet
- Week 1 Lecture 2 - Forces+MomentsDocument37 pagesWeek 1 Lecture 2 - Forces+MomentsMarcus DimitriNo ratings yet
- MomentDocument34 pagesMomentMohd Azhari Mohd RodziNo ratings yet
- Lec Norma A Khan: Force System ResultantsDocument23 pagesLec Norma A Khan: Force System Resultantsnasir alhandNo ratings yet
- Statics - Chapter 4 Sem 2 1415Document49 pagesStatics - Chapter 4 Sem 2 1415Nik Muhd AriffNo ratings yet
- Moment of A Force About A PointDocument15 pagesMoment of A Force About A PointEmmanuel OlalekanNo ratings yet
- Moment and CouplesDocument66 pagesMoment and CouplesUnknown_unknown_unknownNo ratings yet
- Engineering Mechanics: Statics: ForceDocument16 pagesEngineering Mechanics: Statics: ForceChristogratia Immanuel SimbolonNo ratings yet
- (Applied Mechanics) Chapter 3 - Equivalent Systems of ForceDocument74 pages(Applied Mechanics) Chapter 3 - Equivalent Systems of Forceafiq danialNo ratings yet
- Lesson 7Document29 pagesLesson 7Angelica Rae MolinaNo ratings yet
- StaticsC04 05 22102013 PDFDocument49 pagesStaticsC04 05 22102013 PDFAlex LopezNo ratings yet
- Moments and CouplesDocument26 pagesMoments and CouplesFida KhanNo ratings yet
- StaticsC04 - Force System ResultantsDocument35 pagesStaticsC04 - Force System ResultantsAbdelkader MabroukNo ratings yet
- Engineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunDocument10 pagesEngineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunFahmi FauziNo ratings yet
- 6-Moments Couples and Force Couple SystemsDocument69 pages6-Moments Couples and Force Couple SystemsJamal JalalaniNo ratings yet
- ENGR-1100 Introduction To Engineering AnalysisDocument24 pagesENGR-1100 Introduction To Engineering AnalysisBernadette FigarumNo ratings yet
- Rigid Bodies Equivalent System of ForceDocument31 pagesRigid Bodies Equivalent System of ForceArafat BabarNo ratings yet
- Lesson 2-Topic 2 - Moment of A ForcesDocument6 pagesLesson 2-Topic 2 - Moment of A ForcesNicholas Bonn SingNo ratings yet
- Mekanika Teknik PDFDocument141 pagesMekanika Teknik PDFAnonymous dSFbLxc9No ratings yet
- Free Body Diagram: Sme1101 Engineering Mechanics Course Material (Unit 2) 2015 RegulationsDocument19 pagesFree Body Diagram: Sme1101 Engineering Mechanics Course Material (Unit 2) 2015 RegulationsWaled HantashNo ratings yet
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleFrom EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo ratings yet
- Barron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewFrom EverandBarron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewNo ratings yet
- Topic 1Document10 pagesTopic 1Bảo Tín TrầnNo ratings yet
- Chapter 8 - Mechanisms of Heat TransferDocument10 pagesChapter 8 - Mechanisms of Heat TransferBảo Tín TrầnNo ratings yet
- Chapter 06Document55 pagesChapter 06Bảo Tín TrầnNo ratings yet
- Chapter 12 - Heat ExchangerDocument21 pagesChapter 12 - Heat ExchangerBảo Tín TrầnNo ratings yet
- Chapter 05Document41 pagesChapter 05Bảo Tín TrầnNo ratings yet
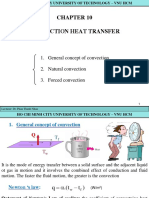
- Chapter 10 - General Concepts of Convection - Natural and Forced ConvectionDocument33 pagesChapter 10 - General Concepts of Convection - Natural and Forced ConvectionBảo Tín TrầnNo ratings yet
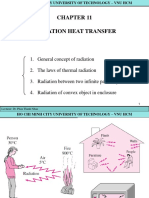
- Chapter 11 - Radiation Heat TransferDocument22 pagesChapter 11 - Radiation Heat TransferBảo Tín TrầnNo ratings yet
- Lecture 1.3-Properties of Fluids-Vapor Pressure&compressibilityDocument22 pagesLecture 1.3-Properties of Fluids-Vapor Pressure&compressibilityBảo Tín TrầnNo ratings yet
- Topic 3aDocument17 pagesTopic 3aBảo Tín TrầnNo ratings yet
- Topic 3bDocument20 pagesTopic 3bBảo Tín TrầnNo ratings yet
- Properties of Fluids-Cont.: EctureDocument15 pagesProperties of Fluids-Cont.: EctureBảo Tín TrầnNo ratings yet
- Lecture 1.1B-Introduction and Basic ConceptsDocument31 pagesLecture 1.1B-Introduction and Basic ConceptsBảo Tín TrầnNo ratings yet
- 02 Stress-Strain and Mechanical Properties HCMUT 2022Document37 pages02 Stress-Strain and Mechanical Properties HCMUT 2022Bảo Tín TrầnNo ratings yet
- 2application of Matrices - 2020Document94 pages2application of Matrices - 2020Bảo Tín TrầnNo ratings yet
- Lecture 1.1A-Introduction To Fluids MechanicsDocument22 pagesLecture 1.1A-Introduction To Fluids MechanicsBảo Tín TrầnNo ratings yet
- Chapter3 Aero 2022Document155 pagesChapter3 Aero 2022Bảo Tín TrầnNo ratings yet
- 01 Introduction of Mechanics of Deformable Solids HCMUT 2022Document68 pages01 Introduction of Mechanics of Deformable Solids HCMUT 2022Bảo Tín TrầnNo ratings yet
- Chapter2 Aero 2022Document114 pagesChapter2 Aero 2022Bảo Tín TrầnNo ratings yet
- Inner Product Spaces: HCMC - 2020Document86 pagesInner Product Spaces: HCMC - 2020Bảo Tín TrầnNo ratings yet
- 3determinant 2020Document93 pages3determinant 2020Bảo Tín TrầnNo ratings yet
- 6inner Product Spaces 2020Document89 pages6inner Product Spaces 2020Bảo Tín TrầnNo ratings yet
- Application of System of Linear Equations 2021Document43 pagesApplication of System of Linear Equations 2021Bảo Tín TrầnNo ratings yet
- Eigenvalues and Eigenvectors: HCMC - 2021Document56 pagesEigenvalues and Eigenvectors: HCMC - 2021Bảo Tín TrầnNo ratings yet
- CO1003 - Chapter 2 - C Program Structure and Its ComponentsDocument57 pagesCO1003 - Chapter 2 - C Program Structure and Its ComponentsBảo Tín TrầnNo ratings yet
- 5vector SpacesDocument113 pages5vector SpacesBảo Tín TrầnNo ratings yet
- Matrices and Matrix Operations: HCMC - 2021Document181 pagesMatrices and Matrix Operations: HCMC - 2021Bảo Tín TrầnNo ratings yet
- CO1003 - Chapter 3 - Variables and Basic Data TypesDocument86 pagesCO1003 - Chapter 3 - Variables and Basic Data TypesBảo Tín TrầnNo ratings yet
- CO1003 - Chapter 1 - Introduction To Computers and ProgrammingDocument36 pagesCO1003 - Chapter 1 - Introduction To Computers and ProgrammingBảo Tín TrầnNo ratings yet
- 4system of Linear Equations 2021Document69 pages4system of Linear Equations 2021Bảo Tín TrầnNo ratings yet
- CO1003 Chapter 6 FunctionsDocument50 pagesCO1003 Chapter 6 FunctionsBảo Tín TrầnNo ratings yet
- Personal Kanban - Mapping Work, Navigating LifeDocument149 pagesPersonal Kanban - Mapping Work, Navigating LifeDario Dorko100% (2)
- BD Report 1st March - 5th March 2018Document2 pagesBD Report 1st March - 5th March 2018Vishesh SahlotNo ratings yet
- Rapport Du Seminaire Animé Par DR Tarik BounjemDocument8 pagesRapport Du Seminaire Animé Par DR Tarik BounjemIhssane GartouaNo ratings yet
- Made Easy-ECDocument33 pagesMade Easy-ECb prashanthNo ratings yet
- Matrix Korelasi ISO IntergrasiDocument3 pagesMatrix Korelasi ISO IntergrasiAgungMahendraNo ratings yet
- E-Retail Outlet For Ready Made GarmentsDocument11 pagesE-Retail Outlet For Ready Made Garmentsrubi laariNo ratings yet
- Nursing Excellence StandardsDocument58 pagesNursing Excellence StandardsJyoti100% (1)
- 2022 Fee Schedule - Torrens UniversityDocument13 pages2022 Fee Schedule - Torrens UniversityDiana MaticNo ratings yet
- Radar: From Wikipedia, The Free EncyclopediaDocument19 pagesRadar: From Wikipedia, The Free EncyclopediaaadhavanshinesNo ratings yet
- 53 Mitsubishi 1B F4A41 F4A4B EtcDocument18 pages53 Mitsubishi 1B F4A41 F4A4B EtcEduardo Alvarez Huiza0% (1)
- Turnbull James Monitoring With Prometheus PDFDocument394 pagesTurnbull James Monitoring With Prometheus PDFGjoko Jovanov100% (1)
- Security Information and Event Management: Radboud University NijmegenDocument75 pagesSecurity Information and Event Management: Radboud University NijmegenproftechitspecialistNo ratings yet
- Social Responsibility Theory FixDocument8 pagesSocial Responsibility Theory Fixsyifa fauziahNo ratings yet
- PD Iso TS 22762-4-2014Document40 pagesPD Iso TS 22762-4-2014Олег СоловьевNo ratings yet
- Introduction To Statistical TheoryDocument5 pagesIntroduction To Statistical TheoryAhmad SattarNo ratings yet
- Swot AnalysisDocument7 pagesSwot AnalysisAlyssa Harriet MartinezNo ratings yet
- ABLE Contract Approval.Document5 pagesABLE Contract Approval.Ferris FerrisNo ratings yet
- Brazil Ventilaton MineDocument6 pagesBrazil Ventilaton MineNaufi SyifaNo ratings yet
- Topic 19 - Manufactures - and - IndustriesDocument1 pageTopic 19 - Manufactures - and - IndustriesMATIAS XAVIER LUNA PARRANo ratings yet
- Medication Use in Pregnancy and The Pregnancy and Lactation Labeling RuleDocument3 pagesMedication Use in Pregnancy and The Pregnancy and Lactation Labeling RuleMaria Emilia Menendez100% (1)
- Empowerment DLP (August 01, 2019)Document2 pagesEmpowerment DLP (August 01, 2019)Clars Ramos Beldad100% (2)
- Rustys 3inch Lift Kit Installation RK-300SP-XJDocument2 pagesRustys 3inch Lift Kit Installation RK-300SP-XJnorthernscribdNo ratings yet
- Salesforce Industries Communications Cloud DatasheetDocument2 pagesSalesforce Industries Communications Cloud DatasheetCharLy HuynhNo ratings yet
- How To Refill HP Cartridge in General V 2Document8 pagesHow To Refill HP Cartridge in General V 2Raymond Aldrich NgoNo ratings yet
- National Building Code - PD 1096 Summary - TOAZ - INFODocument6 pagesNational Building Code - PD 1096 Summary - TOAZ - INFOAlray GolisNo ratings yet
- 六軸機械手臂運動之重力補償與平面避障研究Document85 pages六軸機械手臂運動之重力補償與平面避障研究齊培凱No ratings yet
- Chap 2Document6 pagesChap 2Renier FloresNo ratings yet
- Castilex Industrial Corporation V VasquezDocument3 pagesCastilex Industrial Corporation V VasquezJaz SumalinogNo ratings yet