Download as pptx, pdf, or txt
You might also like
- Lecture 1 Introduction Review of Classical ControlDocument88 pagesLecture 1 Introduction Review of Classical ControlManojkumarNo ratings yet
- Basics of Control and Simulation: Lecture 1: IntroductionDocument62 pagesBasics of Control and Simulation: Lecture 1: IntroductionMurad QəhramanovNo ratings yet
- Lecture 1 Introduction Review of Classical ControlDocument88 pagesLecture 1 Introduction Review of Classical ControlSiraj MohammedNo ratings yet
- Automatic Control System Lec1Document46 pagesAutomatic Control System Lec1Mohamed ElsoodyNo ratings yet
- Chapter1 (Introduction)Document19 pagesChapter1 (Introduction)Nischal MaharjanNo ratings yet
- Lecture 1 DR Mohammed Salah ControlDocument60 pagesLecture 1 DR Mohammed Salah Controlyussra amerNo ratings yet
- Control Systems Lect 02bDocument23 pagesControl Systems Lect 02bShadi KhanNo ratings yet
- Control MidDocument310 pagesControl MidRIZER l رايزرNo ratings yet
- Control System Analysis: Dr. Mbazingwa E. MkiramweniDocument46 pagesControl System Analysis: Dr. Mbazingwa E. MkiramweniSokoine Hamad DenisNo ratings yet
- Lecture 1-IntroductionDocument22 pagesLecture 1-IntroductionShreyansh SaraswatNo ratings yet
- Automatic Control SystemsDocument36 pagesAutomatic Control SystemsDoru TărcăuNo ratings yet
- 351 - 27435 - EE418 - 2016 - 1 - 2 - 1 - 0 1 Lec1 EE418 IntroductionDocument38 pages351 - 27435 - EE418 - 2016 - 1 - 2 - 1 - 0 1 Lec1 EE418 IntroductionEljameely JamaleldeenNo ratings yet
- Week 1 - L1 (B) - Classification of Control SystemDocument29 pagesWeek 1 - L1 (B) - Classification of Control SystemOlerile AnaniaNo ratings yet
- Feedback and Control SystemsDocument33 pagesFeedback and Control SystemsJullie Mae MierNo ratings yet
- Lecture # 01 (EL-305) - DR - TariqDocument28 pagesLecture # 01 (EL-305) - DR - TariqFawad HassanNo ratings yet
- Lecture 1 IntroductionDocument29 pagesLecture 1 IntroductionMohanad Al-RekanyNo ratings yet
- 1 Introduction To Control SystemsDocument47 pages1 Introduction To Control Systemsokay45486No ratings yet
- Lecture 01 1Document27 pagesLecture 01 1sarmed ahmedNo ratings yet
- Linear Control System: Engr. Waqar AhmedDocument19 pagesLinear Control System: Engr. Waqar AhmedAsheer TanveerNo ratings yet
- Chapter 1 Introduction W2015Document42 pagesChapter 1 Introduction W2015120200421003nNo ratings yet
- Control Systems Week 1Document67 pagesControl Systems Week 1Mahmoud AliNo ratings yet
- DrSsim 2761 16069 2 Lecture1-IntroductionDocument38 pagesDrSsim 2761 16069 2 Lecture1-IntroductionZeeshan RafiqNo ratings yet
- Chap 1Document14 pagesChap 1Siraj MohammedNo ratings yet
- Lecture@Introduction@Chap 01Document60 pagesLecture@Introduction@Chap 01souvikghoshdreamNo ratings yet
- Unit I Introduction To Mechatronics R&a 2023Document103 pagesUnit I Introduction To Mechatronics R&a 2023kesofi4046No ratings yet
- L1 - Introduction To ControlDocument26 pagesL1 - Introduction To ControlAbdullahi Zubairu SokombaNo ratings yet
- Lecture 1 2-IntroductionDocument36 pagesLecture 1 2-Introductionjanderson13No ratings yet
- Automotive Control Systems - NJT-1Document67 pagesAutomotive Control Systems - NJT-1ranaparth4050No ratings yet
- EE435 - Chapter1 - Lec1 - Introduction To Control Systems - A.HaddadDocument39 pagesEE435 - Chapter1 - Lec1 - Introduction To Control Systems - A.HaddadIbrahim abdoNo ratings yet
- GEE338 LCS Chapter - 1 Math Model For LTI SystemDocument70 pagesGEE338 LCS Chapter - 1 Math Model For LTI Systemmarwanosama229No ratings yet
- Chapter OneDocument21 pagesChapter OnetimketaNo ratings yet
- Automation and Control Systems: Dr. Issam ELGMATIDocument40 pagesAutomation and Control Systems: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
- Lecture-1 Control SystemDocument44 pagesLecture-1 Control SystemKuldeep SahayNo ratings yet
- Control Systems Work PrincipleDocument8 pagesControl Systems Work Principleabdulla qaisNo ratings yet
- NMB34203 ch1 IntroDocument38 pagesNMB34203 ch1 IntrofatinNo ratings yet
- Control SystemDocument49 pagesControl SystemYashwant ChaudharyNo ratings yet
- Lecture 1Document25 pagesLecture 1Abdullah Mohammed AlsaadouniNo ratings yet
- Enpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDDocument101 pagesEnpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDRahul Subramonian BamaNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- ECNG-3212 Lecture 01Document49 pagesECNG-3212 Lecture 01hiwot222712No ratings yet
- Regulations and Control Engineering (Meng 4162) : Chapter - 1 Introduction To Control SystemsDocument30 pagesRegulations and Control Engineering (Meng 4162) : Chapter - 1 Introduction To Control SystemsYared brhaneNo ratings yet
- Lecture 1Document31 pagesLecture 1faruktokuslu16No ratings yet
- Open Loop & Closed Loop SystemDocument7 pagesOpen Loop & Closed Loop SystemArun GoraiNo ratings yet
- Bcs (Unit 1)Document23 pagesBcs (Unit 1)sivamani CHINNASWAMYNo ratings yet
- Lecture 01 Overview of Control SystemsDocument32 pagesLecture 01 Overview of Control Systemscesar ruizNo ratings yet
- 1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemDocument33 pages1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemAzhar AliNo ratings yet
- Controlsystem Unit 1Document309 pagesControlsystem Unit 1pullagura sowmyaNo ratings yet
- Lec - 1-2 Introduction To Control SystemsDocument25 pagesLec - 1-2 Introduction To Control SystemsMaryam BhattiNo ratings yet
- UNIT - 01 Introduction and Mathematical Modeling To Control SystemsDocument68 pagesUNIT - 01 Introduction and Mathematical Modeling To Control SystemsMD SHAHRIARMAHMUDNo ratings yet
- (Lecture Notes) Chapter 1.0Document28 pages(Lecture Notes) Chapter 1.0wanbalqismuzaniNo ratings yet
- LECTURE 1. Control Systems Engineering - MEB 4101-1Document44 pagesLECTURE 1. Control Systems Engineering - MEB 4101-1nickokinyunyu11No ratings yet
- Unit 1 Control SystemDocument86 pagesUnit 1 Control SystemVijay Ct67% (3)
- Control of Smart SystemsDocument87 pagesControl of Smart SystemsaminNo ratings yet
- Chapter 1 - v1sDocument31 pagesChapter 1 - v1sKiet Kuat KongNo ratings yet
- Note 1-2024Document60 pagesNote 1-2024kamosasakaNo ratings yet
- 1 IntroductionDocument31 pages1 IntroductionAna BouelesNo ratings yet
- Control Systems Lecture-1 2018Document60 pagesControl Systems Lecture-1 2018Lloyd MunthaliNo ratings yet
- TEL 433 Lect 01 NOTE IntroductionDocument9 pagesTEL 433 Lect 01 NOTE IntroductionTestimonyNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Mechatronic_Design_of_a_Four-Wheel_drive_mobile_roDocument10 pagesMechatronic_Design_of_a_Four-Wheel_drive_mobile_roMohanad Al-RekanyNo ratings yet
- Motion_control_system_of_autonomousDocument5 pagesMotion_control_system_of_autonomousMohanad Al-RekanyNo ratings yet
- Lecture 1 IntroductionDocument29 pagesLecture 1 IntroductionMohanad Al-RekanyNo ratings yet
- Adaptive Control Using Interval Type2 Fuzzy LogicDocument8 pagesAdaptive Control Using Interval Type2 Fuzzy LogicMohanad Al-RekanyNo ratings yet
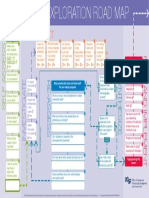
- MINDRoad Map InteractiveDocument1 pageMINDRoad Map InteractiveMohanad Al-RekanyNo ratings yet
- Inspire Freelancing CalendarDocument2 pagesInspire Freelancing CalendarMohanad Al-RekanyNo ratings yet
- Applied Chemical Engineering CalculationsDocument7 pagesApplied Chemical Engineering Calculationsmbolantenaina100% (1)
- Lec 14 - Characterization of LTI Systems Using The Laplace Transform v1.0Document30 pagesLec 14 - Characterization of LTI Systems Using The Laplace Transform v1.0Timmy QuinnNo ratings yet
- Maple SAM-04Document6 pagesMaple SAM-04Leo KutsNo ratings yet
- Ss Jntuk Dec 2015Document4 pagesSs Jntuk Dec 2015giribabukandeNo ratings yet
- GridDocument283 pagesGridMaryam AbpakhshNo ratings yet
- Esp 3701 Tut 2021Document18 pagesEsp 3701 Tut 2021Kuda ChiwandireNo ratings yet
- EE5103 Part1 Lecture 1Document66 pagesEE5103 Part1 Lecture 1sugarpotpieNo ratings yet
- Math Lec1Document30 pagesMath Lec1Shubham GoelNo ratings yet
- 2.1 Laplace UpdateDocument17 pages2.1 Laplace UpdateNasir AiyubNo ratings yet
- On Double Laplace Transform and Double Sumudu TransformDocument6 pagesOn Double Laplace Transform and Double Sumudu TransformAJER JOURNALNo ratings yet
- f342 Proc Dyns 03Document18 pagesf342 Proc Dyns 03Hardik HurkatNo ratings yet
- APM346 Summary 12 2020Document14 pagesAPM346 Summary 12 2020Anwar MoudadNo ratings yet
- Differential EquationsDocument10 pagesDifferential EquationsPatricia PazNo ratings yet
- It1201 SSDocument2 pagesIt1201 SSbsgindia82No ratings yet
- Ies Maths PDFDocument26 pagesIes Maths PDFPradyumna GR0% (1)
- TR 94 40.psDocument85 pagesTR 94 40.psIshtiaqUrRehmanNo ratings yet
- Engineering Maths 2Document3 pagesEngineering Maths 2Sameer SyedNo ratings yet
- Textile TechnologyDocument80 pagesTextile TechnologyJagan KumarNo ratings yet
- Soil M PDFDocument24 pagesSoil M PDFsabari nivashNo ratings yet
- Advanced Engg Math Module 2Document12 pagesAdvanced Engg Math Module 2Joshua Roberto GrutaNo ratings yet
- TRB 2016 SyllabusDocument3 pagesTRB 2016 SyllabusrajNo ratings yet
- Four Page PDFDocument4 pagesFour Page PDFabhishekNo ratings yet
- Dept & Sem: Subject Name: Course Code: Unit: Prepared byDocument75 pagesDept & Sem: Subject Name: Course Code: Unit: Prepared byRaja ReddyNo ratings yet
- Unit 8 Inverse Laplace TransformsDocument34 pagesUnit 8 Inverse Laplace TransformsRaghuNo ratings yet
- MA5151-Advanced Mathematical MethodsDocument13 pagesMA5151-Advanced Mathematical MethodscmuruganNo ratings yet
- Laplace Network 2Document21 pagesLaplace Network 2Apaar GuptaNo ratings yet
- Electric Circuits and Machines Electronics EngineeringDocument4 pagesElectric Circuits and Machines Electronics EngineeringArjun KhatiwadaNo ratings yet
- AutomaticControlforMechanicalEngineersByM GalalRabieoptDocument176 pagesAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraNo ratings yet
- B.Tech I & II Semester Syllabus - 2018-19 PDFDocument41 pagesB.Tech I & II Semester Syllabus - 2018-19 PDFDatta YallapuNo ratings yet
- Control Systems: Modeling of Electrical and Mechanical SystemsDocument71 pagesControl Systems: Modeling of Electrical and Mechanical SystemsMurad QəhramanovNo ratings yet