Download as pptx, pdf, or txt
You might also like
- BÀI TH C HÀNH LT RobotDocument30 pagesBÀI TH C HÀNH LT RobotTânNo ratings yet
- LA BÀN ĐIỆN JRC ALPHAMIDICOURSEDocument65 pagesLA BÀN ĐIỆN JRC ALPHAMIDICOURSEthỏaNo ratings yet
- ĐỒ ÁN TÍNH TOÁN THIẾT KẾ CHO ROBOT ELBOWDocument44 pagesĐỒ ÁN TÍNH TOÁN THIẾT KẾ CHO ROBOT ELBOWMạnh QuyềnNo ratings yet
- All TN RobotDocument85 pagesAll TN Robotphamnhathao95No ratings yet
- HUST PPT Template 2022 RED 4x3Document19 pagesHUST PPT Template 2022 RED 4x3tdbh2oNo ratings yet
- Thiết Kế ScaraDocument22 pagesThiết Kế ScaraHoang KienNo ratings yet
- Báo Cáo-Mobile Robot (Experiments) - Nhóm 11Document44 pagesBáo Cáo-Mobile Robot (Experiments) - Nhóm 11doanvantinh.12a1No ratings yet
- cấu tạo và ưu nhược điểmDocument2 pagescấu tạo và ưu nhược điểmdoquangvan1101No ratings yet
- Bai1 - Van Hanh RobotDocument17 pagesBai1 - Van Hanh Robotphamnhathao95No ratings yet
- Introduction To Robotics - Cau Truc Va Thiet Ke - 2Document53 pagesIntroduction To Robotics - Cau Truc Va Thiet Ke - 2tyud120345No ratings yet
- PP Thuyết Trình Đồ ÁnDocument32 pagesPP Thuyết Trình Đồ Ánhghuvt201101No ratings yet
- Robot hàn ABB: ABB Thụy Sĩ (nhà máy sản xuất tại Thượng Hải/Trung Quốc) - Sản xuất theoDocument3 pagesRobot hàn ABB: ABB Thụy Sĩ (nhà máy sản xuất tại Thượng Hải/Trung Quốc) - Sản xuất theoĐinhVănKiênNo ratings yet
- Bai1 - Van Hanh Robot - 2021 01 20Document17 pagesBai1 - Van Hanh Robot - 2021 01 20TOÀN NGÔ QUỐCNo ratings yet
- HDTN - Nhap - Mon - CĐT - bản thảoDocument62 pagesHDTN - Nhap - Mon - CĐT - bản thảoHậu VũNo ratings yet
- tóm tắt DATNDocument16 pagestóm tắt DATNvanminh nguyenNo ratings yet
- ISSN: 2252-5459 (Trực tuyến) ISSN: 2252-4274 (Bản in) 123Document14 pagesISSN: 2252-5459 (Trực tuyến) ISSN: 2252-4274 (Bản in) 123A Xuan PhuNo ratings yet
- Chế tạo robot di động - C3Document19 pagesChế tạo robot di động - C3Phong le XuanNo ratings yet
- Giới thiệu về Factory IODocument16 pagesGiới thiệu về Factory IOHieu NguyenNo ratings yet
- Nhom Xe Tranh Vat CanDocument27 pagesNhom Xe Tranh Vat CanSơn Nguyễn VănNo ratings yet
- Báo Cáo Thực Hành Kỹ Thuật RobotDocument16 pagesBáo Cáo Thực Hành Kỹ Thuật Robotminhtrong1596No ratings yet
- Plane ArduinoDocument35 pagesPlane ArduinoCelsiusNguyenNo ratings yet
- Bao Cao BTL Xe Tranh Vat CanDocument20 pagesBao Cao BTL Xe Tranh Vat Cantepbo2002100% (1)
- Chuong 5 - Control System of Robot ManipulatorsDocument25 pagesChuong 5 - Control System of Robot ManipulatorsTrần Nhật MinhNo ratings yet
- 1.tran Duc Quan 1Document6 pages1.tran Duc Quan 1Phạm Văn BáchNo ratings yet
- 492578671 Canh Tay Robot Phan Loại Sản Phẩm Dựa Vao Mau SắcDocument29 pages492578671 Canh Tay Robot Phan Loại Sản Phẩm Dựa Vao Mau SắcPhong Quốc ĐấtNo ratings yet
- báo cáo sửa ngày LẦN 1Document24 pagesbáo cáo sửa ngày LẦN 1pqhung.dhcd15a2hnNo ratings yet
- Đ NG Cơ ServoDocument6 pagesĐ NG Cơ ServoTuấn NguyễnNo ratings yet
- Hệ Thống Mobile RobotDocument3 pagesHệ Thống Mobile RobotToàn Nguyễn CảnhNo ratings yet
- XE TRÁNH VẬT CẢNDocument20 pagesXE TRÁNH VẬT CẢNHoang Tran MinhNo ratings yet
- ROBOT CÔNG NGHIỆP FINAL 1Document11 pagesROBOT CÔNG NGHIỆP FINAL 1Tuấn AnhNo ratings yet
- Đ Án IIDocument27 pagesĐ Án IIVinhNo ratings yet
- GiaoTrinh RobotDocument83 pagesGiaoTrinh RobotNguyễn Hùng Huy LêNo ratings yet
- BTL Dung SaiDocument11 pagesBTL Dung SaiĐặng Thái DươngNo ratings yet
- (123doc) - Nghien-Cuu-Thiet-Ke-Robot-3-Bac-Tu-Do-Toa-Do-CauDocument99 pages(123doc) - Nghien-Cuu-Thiet-Ke-Robot-3-Bac-Tu-Do-Toa-Do-Cau1ST ThreshNo ratings yet
- BaocaohtcodientuDocument26 pagesBaocaohtcodientuLong NhậtNo ratings yet
- Đồ Án Môn Học: Thiết kế robot SCARA 3 bậc tự doDocument45 pagesĐồ Án Môn Học: Thiết kế robot SCARA 3 bậc tự donghĩa nguyễnNo ratings yet
- Báo cáo tuần nhóm Robot tự hành K64Document8 pagesBáo cáo tuần nhóm Robot tự hành K64Nhật MinhNo ratings yet
- 123Document10 pages123phatba69No ratings yet
- MV BOB V2.4.x ManualDocument17 pagesMV BOB V2.4.x ManualThanh DatNo ratings yet
- (123doc) - Dieu-Khien-Canh-Tay-RobotDocument47 pages(123doc) - Dieu-Khien-Canh-Tay-RobotChung PhùngNo ratings yet
- GiaoTrinh RobotDocument82 pagesGiaoTrinh RobotTran Thai Bao100% (3)
- Báo Cáo RobotDocument17 pagesBáo Cáo RobotTrần ĐứcNo ratings yet
- BTL-nhom 6Document21 pagesBTL-nhom 6phuc140103No ratings yet
- Huong Dan Flowcode AvrDocument228 pagesHuong Dan Flowcode AvrNgô Đình NhânNo ratings yet
- thuyết trìnhDocument19 pagesthuyết trìnhThần LýNo ratings yet
- La Bàn Điện Jrc AlphamidicourseDocument33 pagesLa Bàn Điện Jrc AlphamidicoursethỏaNo ratings yet
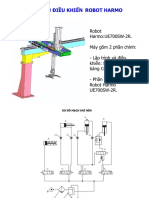
- Robot Harmo - Gui SVDocument19 pagesRobot Harmo - Gui SVNguyễn Duy AnhNo ratings yet
- Unit 7,8Document19 pagesUnit 7,8phạm sơnNo ratings yet
- Robot DK Tu XaDocument38 pagesRobot DK Tu XaVUI VUINo ratings yet
- BáoCáoCuốiKy2 - ThiếtBịĐiện - Nhóm 4 - EMA3131 - 1Document25 pagesBáoCáoCuốiKy2 - ThiếtBịĐiện - Nhóm 4 - EMA3131 - 1Nhân Hồ ThứcNo ratings yet
- Control and Simulink A Robotic Arm 4DOFDocument36 pagesControl and Simulink A Robotic Arm 4DOFJohn HNo ratings yet
- Bao CaoDocument38 pagesBao CaoNguyễn Xuân TrườngNo ratings yet
- PP BaocaoDocument24 pagesPP Baocaophan longNo ratings yet
- CDTC - Bia 6Document13 pagesCDTC - Bia 6Cường MinhNo ratings yet
- Báo cáo môn họcDocument38 pagesBáo cáo môn họcNguyễn Kiến VănNo ratings yet
- Thiet Ke He Thong Dieu Khien Giam Sat Cho He Thong Rot Bia D Wy0byoskrx 20130305094536 4 6048Document20 pagesThiet Ke He Thong Dieu Khien Giam Sat Cho He Thong Rot Bia D Wy0byoskrx 20130305094536 4 6048Nguyễn Kiến VănNo ratings yet
- He Thong Dong Nap Chai Nuoc Tu Dong 1 9063Document10 pagesHe Thong Dong Nap Chai Nuoc Tu Dong 1 9063Nguyễn Kiến VănNo ratings yet
- GV 2223 2022 10 24Document27 pagesGV 2223 2022 10 24Nguyễn Kiến VănNo ratings yet