Download as pptx, pdf, or txt
You might also like
- SynthesisDocument51 pagesSynthesissudhir100% (2)
- LTE Planning and Design GuidelinesDocument20 pagesLTE Planning and Design GuidelinesThomas Jacob100% (1)
- 1) Explain in Detail Core Function of Edge Analytics With DiagramDocument13 pages1) Explain in Detail Core Function of Edge Analytics With DiagramsarakeNo ratings yet
- IO Management-1Document12 pagesIO Management-1Leslie QwerNo ratings yet
- Unit 4: Symbol TableDocument38 pagesUnit 4: Symbol TableViral Videos Ka AddaNo ratings yet
- Project PresentationDocument17 pagesProject PresentationKhevana PurohitNo ratings yet
- What Is A Timing DiagramDocument4 pagesWhat Is A Timing DiagramAbhisek SarkarNo ratings yet
- VTU Exam Question Paper With Solution of 18CS822 Storage Area Networks June-2023-Dr.S.seethaDocument38 pagesVTU Exam Question Paper With Solution of 18CS822 Storage Area Networks June-2023-Dr.S.seethablyashu561No ratings yet
- MCS 041 2011Document7 pagesMCS 041 2011peetkumarNo ratings yet
- Lecture - 16 Data Flow and Systolic Array ArchitecturesDocument15 pagesLecture - 16 Data Flow and Systolic Array ArchitecturesmohsinmanzoorNo ratings yet
- Allocation Data Structure: We Will Discuss Two Allocation Data Structures: - Stacks - HeapsDocument17 pagesAllocation Data Structure: We Will Discuss Two Allocation Data Structures: - Stacks - Heapsakhot86No ratings yet
- Data Dissemination and Broadcasting Systems: Lesson 08 Indexing Techniques For Selective TuningDocument20 pagesData Dissemination and Broadcasting Systems: Lesson 08 Indexing Techniques For Selective TuningsukanyaNo ratings yet
- Data Compression in Sensor Networks: - Hina ShahDocument32 pagesData Compression in Sensor Networks: - Hina ShahTuan DoanhNo ratings yet
- MC-1Document16 pagesMC-1Mr. RobotNo ratings yet
- Unit 4Document24 pagesUnit 4BhagyaNo ratings yet
- Q1. Explain All Design Issues For Several Layers in Computer. What Is Connection Oriented and Connectionless Service?Document8 pagesQ1. Explain All Design Issues For Several Layers in Computer. What Is Connection Oriented and Connectionless Service?Shabbir KahodawalaNo ratings yet
- Datastage Interview Questions & AnswersDocument8 pagesDatastage Interview Questions & AnswersVamsi KarthikNo ratings yet
- Issues in Hardware-Software Design and Co-DesignDocument7 pagesIssues in Hardware-Software Design and Co-DesignSoundarya SvsNo ratings yet
- Oracle DiscovererDocument411 pagesOracle DiscovererJitendra KumarNo ratings yet
- 3 Points About OverlaysDocument4 pages3 Points About OverlaysNidhi KanwarNo ratings yet
- P5 Copy of SAP BW ARCHTECTURE121Document35 pagesP5 Copy of SAP BW ARCHTECTURE121rajNo ratings yet
- 3.information Systems TechnologyDocument9 pages3.information Systems TechnologyFoysal IlahiNo ratings yet
- Wireshark Task Copy 1Document11 pagesWireshark Task Copy 1imtiaz KhanNo ratings yet
- Paladion ArcSight Training3Document50 pagesPaladion ArcSight Training3Krishna GollapalliNo ratings yet
- How Do You Handle Inter Process Communication in As/400?Document12 pagesHow Do You Handle Inter Process Communication in As/400?rajesh choudaryNo ratings yet
- SAN - IAT - 1-Sept 2015 SchemeDocument12 pagesSAN - IAT - 1-Sept 2015 SchemeSOURAV CHATTERJEENo ratings yet
- Observability at Twitter - Technical Overview, Part I - Twitter BlogsDocument7 pagesObservability at Twitter - Technical Overview, Part I - Twitter BlogsFinigan JoyceNo ratings yet
- DC and CN Chapter-2Document53 pagesDC and CN Chapter-2habtamud655No ratings yet
- Chapter 3Document9 pagesChapter 3247 Faizan ShaikhNo ratings yet
- 02 Data DictionaryDocument8 pages02 Data DictionarysumnatarajNo ratings yet
- CS537 15SP KZHANG Report DiskSchedulingAlgorithms PDFDocument12 pagesCS537 15SP KZHANG Report DiskSchedulingAlgorithms PDFAnonymous jaZpHnEUATNo ratings yet
- Data Files PDFDocument26 pagesData Files PDFAhmed Zehara (IDPP)No ratings yet
- Faqs in DdicDocument9 pagesFaqs in DdicBhavani SimgamsettiNo ratings yet
- Unit-5 Mobile ComputingDocument133 pagesUnit-5 Mobile Computingvdr556No ratings yet
- Differentiate Between BDocument6 pagesDifferentiate Between BraniNo ratings yet
- Coa Imp Q&a Unit-2Document15 pagesCoa Imp Q&a Unit-222eg105q15No ratings yet
- Simulation of Scheduling AlgoDocument13 pagesSimulation of Scheduling AlgoKanika KapoorNo ratings yet
- Comp 272 NotesDocument26 pagesComp 272 Notesqqq wweeew0% (1)
- Module 1: Basic Structure of Computers 1.1 Basic Operational ConceptsDocument34 pagesModule 1: Basic Structure of Computers 1.1 Basic Operational Conceptsyashu JNo ratings yet
- Oriented Multicast Routing Algorithm Applied To Network-Level Agent SearchDocument18 pagesOriented Multicast Routing Algorithm Applied To Network-Level Agent SearchAlex HillNo ratings yet
- Unit 5Document10 pagesUnit 5diabloplayz1001No ratings yet
- Network Model ArchitectureDocument27 pagesNetwork Model ArchitectureS M AkashNo ratings yet
- Computer Networks Midsems 17074004Document8 pagesComputer Networks Midsems 17074004Kumar shivamNo ratings yet
- Ab CompDocument18 pagesAb Compd 123100% (1)
- Io P1Document9 pagesIo P1hossein_eskandarNo ratings yet
- File OrganizationnotesDocument10 pagesFile OrganizationnotesJatin ChaudhariNo ratings yet
- A New Approach For Measuring Latency and Bandwidth in Wireless Ad Hoc NetworkDocument8 pagesA New Approach For Measuring Latency and Bandwidth in Wireless Ad Hoc NetworkJohn TimothyNo ratings yet
- CPU Organization / Main MemoryDocument15 pagesCPU Organization / Main MemoryVijay KumarNo ratings yet
- TSAR A Two Tier Sensor Storage Architecture Using Interval Skip GraphsDocument12 pagesTSAR A Two Tier Sensor Storage Architecture Using Interval Skip GraphsAugusto BaffaNo ratings yet
- Register and CounterDocument3 pagesRegister and CounterSujal MishraNo ratings yet
- Opreating SystemDocument6 pagesOpreating SystemUsama Riaz VlogsNo ratings yet
- Hyperion:High Volume Stream Archival: Divya MuthukumaranDocument24 pagesHyperion:High Volume Stream Archival: Divya MuthukumaranmshabbeerNo ratings yet
- Note 6 MicrocontrollersDocument27 pagesNote 6 MicrocontrollersbalaNo ratings yet
- Lecture 5.Pptx 2Document22 pagesLecture 5.Pptx 2Sankaraguru FathimaNo ratings yet
- CN Questionbank Solution Unit1-4Document70 pagesCN Questionbank Solution Unit1-4Indrajit MajiNo ratings yet
- Symbol Table Run Time EnvironmentDocument39 pagesSymbol Table Run Time EnvironmentRavi TejaNo ratings yet
- Unit 4 (New Syll)Document11 pagesUnit 4 (New Syll)Harish HariNo ratings yet
- E - Technologies - RFID: Descriptive Questions Q2 10 Marks EachDocument68 pagesE - Technologies - RFID: Descriptive Questions Q2 10 Marks EachMonica ChakrabortyNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Unit 5 WAP and ToolsDocument45 pagesUnit 5 WAP and Toolsshreedhar joshiNo ratings yet
- Unit - 5 - Mobile Device Operating SystemDocument47 pagesUnit - 5 - Mobile Device Operating Systemshreedhar joshiNo ratings yet
- Universal Human Values - Value Education - Unit 1Document27 pagesUniversal Human Values - Value Education - Unit 1shreedhar joshiNo ratings yet
- Universal Human Values Self Exploration Unit 1Document30 pagesUniversal Human Values Self Exploration Unit 1shreedhar joshiNo ratings yet
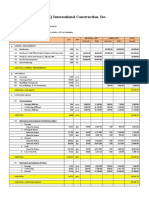
- JQ International Construction, IncDocument2 pagesJQ International Construction, Incyael rodriguez100% (1)
- VSX-808RDS: Audio/Video Multi-Channel ReceiverDocument62 pagesVSX-808RDS: Audio/Video Multi-Channel ReceiverDaniel Crespillo BlancoNo ratings yet
- 1360-PS-0001 IS WindObserver Manual Issue 14 - Part4Document2 pages1360-PS-0001 IS WindObserver Manual Issue 14 - Part4AR El Patron KadryNo ratings yet
- Log MinarDocument24 pagesLog MinarGaurav GuptaNo ratings yet
- Flammable Vapor Ignition Initiated by HoDocument12 pagesFlammable Vapor Ignition Initiated by HoNurettin TERZİOĞLUNo ratings yet
- B2. Formatting Text Using TagsDocument27 pagesB2. Formatting Text Using TagsHuỳnh Tôn Minh QuânNo ratings yet
- Subject: ACI-ICAO Implementing Annex 14 Course: (Cairo, Egypt, 28 June - 2 July 2020)Document2 pagesSubject: ACI-ICAO Implementing Annex 14 Course: (Cairo, Egypt, 28 June - 2 July 2020)Osama SharafNo ratings yet
- Ai&ml RecordDocument57 pagesAi&ml Recordhemapardeep8No ratings yet
- 11.inheritance and PolymorphismDocument47 pages11.inheritance and PolymorphismVivek BhardwajNo ratings yet
- Vector Operating Manual RevJ 031920Document81 pagesVector Operating Manual RevJ 031920Myname Is MLKNo ratings yet
- Cs431 CD Lab Manual - Knpy PDFDocument47 pagesCs431 CD Lab Manual - Knpy PDFVishnu SNo ratings yet
- CT122 6987062 enUS Om 05-12Document218 pagesCT122 6987062 enUS Om 05-12Henry HuayhuaNo ratings yet
- Automatic Differential Unit Locking SystemDocument19 pagesAutomatic Differential Unit Locking SystemPradeep Gs100% (1)
- 01.hazards of Trapped Pressure & Vacuum-38Document2 pages01.hazards of Trapped Pressure & Vacuum-38rahulNo ratings yet
- STK415-100-E: 2-Channel Power Switching Audio Power IC, 60W+60WDocument12 pagesSTK415-100-E: 2-Channel Power Switching Audio Power IC, 60W+60WedisonpcNo ratings yet
- Installation Users Guide 200-X Rev A2Document28 pagesInstallation Users Guide 200-X Rev A2Jean-Claude DNo ratings yet
- Kelly Portfolio OptimizationDocument19 pagesKelly Portfolio OptimizationRiccardo RoncoNo ratings yet
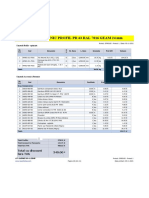
- OFERTA TEHNIC PROFIL PR 63 RAL 7016 GEAM 24 MMDocument1 pageOFERTA TEHNIC PROFIL PR 63 RAL 7016 GEAM 24 MMLucianNo ratings yet
- What Is CinemaDocument4 pagesWhat Is CinemaIonutBodascaNo ratings yet
- Advanced Linux: Exercises: 0 Download and Unpack The Exercise Files (Do That First Time Only)Document6 pagesAdvanced Linux: Exercises: 0 Download and Unpack The Exercise Files (Do That First Time Only)Niran SpiritNo ratings yet
- IC Project Management Dashboard 8579Document3 pagesIC Project Management Dashboard 8579carolisdwi permanaNo ratings yet
- Chapter 4 Three Phase Uncontrolled Rectifier (Compatibility Mode)Document17 pagesChapter 4 Three Phase Uncontrolled Rectifier (Compatibility Mode)Apry PermatasariNo ratings yet
- 02 039877 01 C ADA4558 SchematicDocument4 pages02 039877 01 C ADA4558 SchematicOmar EzzNo ratings yet
- Internet of Things: Submitted To: Mr. Prabin K. Rout Asst. Prof Nift BhubaneswarDocument18 pagesInternet of Things: Submitted To: Mr. Prabin K. Rout Asst. Prof Nift BhubaneswarVaisistha BalNo ratings yet
- Customer Part No. 4514954: Injection Pump Specification Model Ik) DelDocument2 pagesCustomer Part No. 4514954: Injection Pump Specification Model Ik) DeldieselmotorsbogotasasNo ratings yet
- The 2017 Customer Experience Index (CEI) Study: IBM Institute For Business ValueDocument4 pagesThe 2017 Customer Experience Index (CEI) Study: IBM Institute For Business ValueAbhay kushwahaNo ratings yet
- 3 AI - Search IIIDocument72 pages3 AI - Search IIIkuramthanushmaNo ratings yet
- Smart Waste Collection Monitoring and Alert System Via IoTDocument8 pagesSmart Waste Collection Monitoring and Alert System Via IoTIJRASETPublicationsNo ratings yet
- Where and How Does Urban Design Happen Thought CollectionDocument7 pagesWhere and How Does Urban Design Happen Thought Collectionvince baconsNo ratings yet
- Improved Particle Swarm Optimization Based MPPT For PV Systems Under Partial Shading ConditionsDocument6 pagesImproved Particle Swarm Optimization Based MPPT For PV Systems Under Partial Shading ConditionsNazrul HaqemNo ratings yet