
Operating System Lecture One: DR Jamal Altuwaijari
Operating System Lecture One: DR Jamal Altuwaijari
You might also like
- Operating Systems Week4Document30 pagesOperating Systems Week4Yano NettleNo ratings yet
- Unit 1 Part 1 NotesDocument9 pagesUnit 1 Part 1 NotesBhomik-116No ratings yet
- OS Unit 1Document4 pagesOS Unit 1karunasingh772No ratings yet
- Module 2 TEACHINGICTEXPLORATORYDocument20 pagesModule 2 TEACHINGICTEXPLORATORYangelNo ratings yet
- OSY - 91 ClubDocument25 pagesOSY - 91 ClubjigarmahavarNo ratings yet
- Studies and Research, Pune: Symbiosis Institute of ComputerDocument26 pagesStudies and Research, Pune: Symbiosis Institute of ComputerDhan CNo ratings yet
- Introduction To OSDocument12 pagesIntroduction To OSMag CreationNo ratings yet
- Types of Operting SystemDocument3 pagesTypes of Operting SystemRedietNo ratings yet
- Os, Meaning and Types of OsDocument5 pagesOs, Meaning and Types of OsBoobalan RNo ratings yet
- Operating SystemDocument19 pagesOperating SystemGunjan MathurNo ratings yet
- Module 1 - 1.5. Operating Systems IntroductionDocument15 pagesModule 1 - 1.5. Operating Systems IntroductionPATAN ASIF KHAN STUDENT - MECHNo ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemRajeswaranaidu DarsiNo ratings yet
- Operating System Unit I Part IDocument14 pagesOperating System Unit I Part IA2 MotivationNo ratings yet
- Lecture 2, OSDocument8 pagesLecture 2, OSMaria Akter LuthfaNo ratings yet
- L-1.1.3 Types OSDocument21 pagesL-1.1.3 Types OSSarthak ThakurNo ratings yet
- Lect 1 OSDocument30 pagesLect 1 OSChogeNo ratings yet
- Types of Operating SystemDocument4 pagesTypes of Operating SystemVaibhav PearsonNo ratings yet
- L3 Types OSDocument24 pagesL3 Types OSAanchal KashyapNo ratings yet
- Linux TutorialDocument10 pagesLinux TutorialRadwa EhabNo ratings yet
- Operating SystemDocument7 pagesOperating SystemVivian BaluranNo ratings yet
- Types of Operating SystemsDocument2 pagesTypes of Operating SystemsTanzeem Syed100% (2)
- Unit-1 Feature Point of View Types of OsDocument5 pagesUnit-1 Feature Point of View Types of OsReshmaNo ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemDev NegiNo ratings yet
- Types of Operating SystemsDocument12 pagesTypes of Operating SystemsRohit MalviNo ratings yet
- Unit-I-Basics of Operating SystemsDocument29 pagesUnit-I-Basics of Operating Systemsnirjargoswami2626No ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemAgrippa Mungazi100% (1)
- Types of Operating SystemsDocument3 pagesTypes of Operating SystemsPraveen Kumar DiwakerNo ratings yet
- Unit 1 - Understanding The Principles of Operating SystemDocument30 pagesUnit 1 - Understanding The Principles of Operating SystemLeah RachaelNo ratings yet
- Module 3Document26 pagesModule 3OK BYENo ratings yet
- Rahul Kirtoniya 11800121032 OS CSEDocument10 pagesRahul Kirtoniya 11800121032 OS CSERahul KirtoniyaNo ratings yet
- NotesDocument19 pagesNotesMuhammad Mueen AslamNo ratings yet
- Microcomputer: MainframeDocument5 pagesMicrocomputer: MainframejoelchaleNo ratings yet
- DOS LecturesDocument116 pagesDOS Lecturesankit.singh.47No ratings yet
- Module 3 Cosc 203 202223Document60 pagesModule 3 Cosc 203 202223oluwatomisin oyaniyiNo ratings yet
- OperatingSystem IntroductionDocument24 pagesOperatingSystem IntroductionAdviNo ratings yet
- CHP - 1 Operating Systems Types and Structure PDFDocument28 pagesCHP - 1 Operating Systems Types and Structure PDFPrateekṣhyā PraneethaNo ratings yet
- OS PPT IntroductionDocument43 pagesOS PPT IntroductionKukum ChouhanNo ratings yet
- COA Chapter 1Document18 pagesCOA Chapter 12018796.cse.coeNo ratings yet
- Types of Operating SystemsDocument12 pagesTypes of Operating SystemsRaja AnsNo ratings yet
- Operating SystemDocument132 pagesOperating SystemIndumathy ParanthamanNo ratings yet
- Operating SystemDocument10 pagesOperating SystemIkbaldebbarNo ratings yet
- Alternative Client-Server Ations (A) - (E) : System Architecture TypesDocument12 pagesAlternative Client-Server Ations (A) - (E) : System Architecture TypesAmudha ArulNo ratings yet
- 227 122 Rtos-Module1Document67 pages227 122 Rtos-Module1AlonaNo ratings yet
- Operating System Unit 1Document29 pagesOperating System Unit 1HECHOS TALKNo ratings yet
- Operating SystemDocument19 pagesOperating SystemSameer SinghNo ratings yet
- Chapter-01 Overview PDFDocument13 pagesChapter-01 Overview PDFAparna 173 CM 046No ratings yet
- What Is Operating System? Discuss Role/functions of OS As A ResourceDocument46 pagesWhat Is Operating System? Discuss Role/functions of OS As A ResourceAvinashNo ratings yet
- Operating System_compressed (1)Document51 pagesOperating System_compressed (1)sonalisingh.singh1299No ratings yet
- Introduction of Operating SystemDocument8 pagesIntroduction of Operating SystemvikkigrgNo ratings yet
- Types of OsDocument12 pagesTypes of OsRamaseshu MachepalliNo ratings yet
- Chapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFDocument29 pagesChapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFGreen ChiquitaNo ratings yet
- ChaptersDocument39 pagesChaptersAli Athar CHNo ratings yet
- UNIT I Notes PDFDocument27 pagesUNIT I Notes PDFAjith MadhanNo ratings yet
- Os Unit-1 Part 1Document12 pagesOs Unit-1 Part 1Raza KashifNo ratings yet
- Operating Systems FullDocument150 pagesOperating Systems FullHarvey Specter100% (1)
- Federal University of Technology, Minna, Nigeria: B.Tech. Computer Science ProgrammeDocument7 pagesFederal University of Technology, Minna, Nigeria: B.Tech. Computer Science Programmefayyadmuhammad45No ratings yet
- Lecture No.8 Ms. Sara Fareed: Information Communication and Technology (ICT)Document25 pagesLecture No.8 Ms. Sara Fareed: Information Communication and Technology (ICT)HaidarNo ratings yet
- OSY - Chapter1Document11 pagesOSY - Chapter1Rupesh BavgeNo ratings yet
- Os Unit 1Document11 pagesOs Unit 1Arshad BegNo ratings yet
- Monty 1510: Spare Parts List Tire ChangerDocument24 pagesMonty 1510: Spare Parts List Tire ChangerJonathan FullumNo ratings yet
- Quectel M12 at Commands Manual V3 2Document195 pagesQuectel M12 at Commands Manual V3 2kalpeshbrNo ratings yet
- Conduct Award RubricsDocument12 pagesConduct Award RubricsMark Antony M. CaseroNo ratings yet
- Driving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteDocument31 pagesDriving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteMike ThomsonNo ratings yet
- Fina6000 Module 4 - Capital Budgeting ADocument40 pagesFina6000 Module 4 - Capital Budgeting AMar SGNo ratings yet
- Ericsson Router 6676Document2 pagesEricsson Router 6676farzad.aminzadeNo ratings yet
- Lecture 2: Drawing Basics - P1 : 1Document9 pagesLecture 2: Drawing Basics - P1 : 1roseNo ratings yet
- Pakistan's Corruption Tsunami: Curse, Contours, Causes, Cost, Challenge and CuresDocument173 pagesPakistan's Corruption Tsunami: Curse, Contours, Causes, Cost, Challenge and CuresPakistan's Corruption100% (3)
- The Sine and Cosine Rule QuestionsDocument20 pagesThe Sine and Cosine Rule QuestionsJacob WilliamNo ratings yet
- Measures of Dispersion: Greg C Elvers, PH.DDocument27 pagesMeasures of Dispersion: Greg C Elvers, PH.Dorchuchi100% (1)
- Substation Transformers: Howard Industries, IncDocument12 pagesSubstation Transformers: Howard Industries, IncjrvarnelNo ratings yet
- Human Rights Term PaperDocument18 pagesHuman Rights Term Papersanjog DewanNo ratings yet
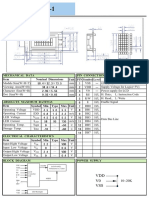
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocument1 pageV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNo ratings yet
- HeinonlineDocument8 pagesHeinonlineSyed AsadNo ratings yet
- I-765 Online Filing Instructions - FINALDocument13 pagesI-765 Online Filing Instructions - FINALTrân LêNo ratings yet
- Fill The Form Below:: Sonia SharmaDocument1 pageFill The Form Below:: Sonia SharmaDr BalakrishnaNo ratings yet
- Thermodynamics: Lecture Notes: First Law of ThermodynamicsDocument39 pagesThermodynamics: Lecture Notes: First Law of ThermodynamicsKusmakarNo ratings yet
- Accenture AptitudeDocument122 pagesAccenture AptitudeHarshith P.BNo ratings yet
- Cable - Datasheet - (En) NSSHCÖU, Prysmian - 2013-06-10 - Screened-Power-CableDocument4 pagesCable - Datasheet - (En) NSSHCÖU, Prysmian - 2013-06-10 - Screened-Power-CableA. Muhsin PamungkasNo ratings yet
- Catálogo de Bombas de Diafragma - ARODocument52 pagesCatálogo de Bombas de Diafragma - AROIvan RodrigoNo ratings yet
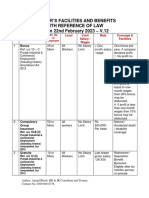
- V 12 - Schedule of Important Labor Laws - 22.02.2023Document6 pagesV 12 - Schedule of Important Labor Laws - 22.02.2023haris hafeezNo ratings yet
- Quantitative and Qualitative Research in FinanceDocument18 pagesQuantitative and Qualitative Research in FinanceZeeshan Hyder BhattiNo ratings yet
- Deutz 2008 SpecsDocument4 pagesDeutz 2008 SpecsaaasNo ratings yet
- Fama French PDFDocument8 pagesFama French PDFMonzer ShkeirNo ratings yet
- Chap 7Document38 pagesChap 7احمد نصارNo ratings yet
- ADR Case DigestsDocument5 pagesADR Case Digestsanaruto_041609No ratings yet
- 4183 17321 1 PBDocument12 pages4183 17321 1 PBUmiKulsumNo ratings yet
- 20 Preparation Question: Contract: Contract 1 Contract 2 Contract 3 Contract 4Document2 pages20 Preparation Question: Contract: Contract 1 Contract 2 Contract 3 Contract 4SerenaNo ratings yet
- BS 5486-13Document25 pagesBS 5486-13Rachel IngramNo ratings yet
- I LuxDocument24 pagesI LuxNirav M. BhavsarNo ratings yet























































































Download as pptx, pdf, or txt
You might also like
- Operating Systems Week4Document30 pagesOperating Systems Week4Yano NettleNo ratings yet
- Unit 1 Part 1 NotesDocument9 pagesUnit 1 Part 1 NotesBhomik-116No ratings yet
- OS Unit 1Document4 pagesOS Unit 1karunasingh772No ratings yet
- Module 2 TEACHINGICTEXPLORATORYDocument20 pagesModule 2 TEACHINGICTEXPLORATORYangelNo ratings yet
- OSY - 91 ClubDocument25 pagesOSY - 91 ClubjigarmahavarNo ratings yet
- Studies and Research, Pune: Symbiosis Institute of ComputerDocument26 pagesStudies and Research, Pune: Symbiosis Institute of ComputerDhan CNo ratings yet
- Introduction To OSDocument12 pagesIntroduction To OSMag CreationNo ratings yet
- Types of Operting SystemDocument3 pagesTypes of Operting SystemRedietNo ratings yet
- Os, Meaning and Types of OsDocument5 pagesOs, Meaning and Types of OsBoobalan RNo ratings yet
- Operating SystemDocument19 pagesOperating SystemGunjan MathurNo ratings yet
- Module 1 - 1.5. Operating Systems IntroductionDocument15 pagesModule 1 - 1.5. Operating Systems IntroductionPATAN ASIF KHAN STUDENT - MECHNo ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemRajeswaranaidu DarsiNo ratings yet
- Operating System Unit I Part IDocument14 pagesOperating System Unit I Part IA2 MotivationNo ratings yet
- Lecture 2, OSDocument8 pagesLecture 2, OSMaria Akter LuthfaNo ratings yet
- L-1.1.3 Types OSDocument21 pagesL-1.1.3 Types OSSarthak ThakurNo ratings yet
- Lect 1 OSDocument30 pagesLect 1 OSChogeNo ratings yet
- Types of Operating SystemDocument4 pagesTypes of Operating SystemVaibhav PearsonNo ratings yet
- L3 Types OSDocument24 pagesL3 Types OSAanchal KashyapNo ratings yet
- Linux TutorialDocument10 pagesLinux TutorialRadwa EhabNo ratings yet
- Operating SystemDocument7 pagesOperating SystemVivian BaluranNo ratings yet
- Types of Operating SystemsDocument2 pagesTypes of Operating SystemsTanzeem Syed100% (2)
- Unit-1 Feature Point of View Types of OsDocument5 pagesUnit-1 Feature Point of View Types of OsReshmaNo ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemDev NegiNo ratings yet
- Types of Operating SystemsDocument12 pagesTypes of Operating SystemsRohit MalviNo ratings yet
- Unit-I-Basics of Operating SystemsDocument29 pagesUnit-I-Basics of Operating Systemsnirjargoswami2626No ratings yet
- Batch Operating SystemDocument3 pagesBatch Operating SystemAgrippa Mungazi100% (1)
- Types of Operating SystemsDocument3 pagesTypes of Operating SystemsPraveen Kumar DiwakerNo ratings yet
- Unit 1 - Understanding The Principles of Operating SystemDocument30 pagesUnit 1 - Understanding The Principles of Operating SystemLeah RachaelNo ratings yet
- Module 3Document26 pagesModule 3OK BYENo ratings yet
- Rahul Kirtoniya 11800121032 OS CSEDocument10 pagesRahul Kirtoniya 11800121032 OS CSERahul KirtoniyaNo ratings yet
- NotesDocument19 pagesNotesMuhammad Mueen AslamNo ratings yet
- Microcomputer: MainframeDocument5 pagesMicrocomputer: MainframejoelchaleNo ratings yet
- DOS LecturesDocument116 pagesDOS Lecturesankit.singh.47No ratings yet
- Module 3 Cosc 203 202223Document60 pagesModule 3 Cosc 203 202223oluwatomisin oyaniyiNo ratings yet
- OperatingSystem IntroductionDocument24 pagesOperatingSystem IntroductionAdviNo ratings yet
- CHP - 1 Operating Systems Types and Structure PDFDocument28 pagesCHP - 1 Operating Systems Types and Structure PDFPrateekṣhyā PraneethaNo ratings yet
- OS PPT IntroductionDocument43 pagesOS PPT IntroductionKukum ChouhanNo ratings yet
- COA Chapter 1Document18 pagesCOA Chapter 12018796.cse.coeNo ratings yet
- Types of Operating SystemsDocument12 pagesTypes of Operating SystemsRaja AnsNo ratings yet
- Operating SystemDocument132 pagesOperating SystemIndumathy ParanthamanNo ratings yet
- Operating SystemDocument10 pagesOperating SystemIkbaldebbarNo ratings yet
- Alternative Client-Server Ations (A) - (E) : System Architecture TypesDocument12 pagesAlternative Client-Server Ations (A) - (E) : System Architecture TypesAmudha ArulNo ratings yet
- 227 122 Rtos-Module1Document67 pages227 122 Rtos-Module1AlonaNo ratings yet
- Operating System Unit 1Document29 pagesOperating System Unit 1HECHOS TALKNo ratings yet
- Operating SystemDocument19 pagesOperating SystemSameer SinghNo ratings yet
- Chapter-01 Overview PDFDocument13 pagesChapter-01 Overview PDFAparna 173 CM 046No ratings yet
- What Is Operating System? Discuss Role/functions of OS As A ResourceDocument46 pagesWhat Is Operating System? Discuss Role/functions of OS As A ResourceAvinashNo ratings yet
- Operating System_compressed (1)Document51 pagesOperating System_compressed (1)sonalisingh.singh1299No ratings yet
- Introduction of Operating SystemDocument8 pagesIntroduction of Operating SystemvikkigrgNo ratings yet
- Types of OsDocument12 pagesTypes of OsRamaseshu MachepalliNo ratings yet
- Chapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFDocument29 pagesChapter 8 System Software: Instructor: Hao Zheng Comp. Sci. & Eng. USFGreen ChiquitaNo ratings yet
- ChaptersDocument39 pagesChaptersAli Athar CHNo ratings yet
- UNIT I Notes PDFDocument27 pagesUNIT I Notes PDFAjith MadhanNo ratings yet
- Os Unit-1 Part 1Document12 pagesOs Unit-1 Part 1Raza KashifNo ratings yet
- Operating Systems FullDocument150 pagesOperating Systems FullHarvey Specter100% (1)
- Federal University of Technology, Minna, Nigeria: B.Tech. Computer Science ProgrammeDocument7 pagesFederal University of Technology, Minna, Nigeria: B.Tech. Computer Science Programmefayyadmuhammad45No ratings yet
- Lecture No.8 Ms. Sara Fareed: Information Communication and Technology (ICT)Document25 pagesLecture No.8 Ms. Sara Fareed: Information Communication and Technology (ICT)HaidarNo ratings yet
- OSY - Chapter1Document11 pagesOSY - Chapter1Rupesh BavgeNo ratings yet
- Os Unit 1Document11 pagesOs Unit 1Arshad BegNo ratings yet
- Monty 1510: Spare Parts List Tire ChangerDocument24 pagesMonty 1510: Spare Parts List Tire ChangerJonathan FullumNo ratings yet
- Quectel M12 at Commands Manual V3 2Document195 pagesQuectel M12 at Commands Manual V3 2kalpeshbrNo ratings yet
- Conduct Award RubricsDocument12 pagesConduct Award RubricsMark Antony M. CaseroNo ratings yet
- Driving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteDocument31 pagesDriving Stepper Motors Using NXP I C-Bus GPIO Expanders: Rev. 2 - 11 October 2011 Application NoteMike ThomsonNo ratings yet
- Fina6000 Module 4 - Capital Budgeting ADocument40 pagesFina6000 Module 4 - Capital Budgeting AMar SGNo ratings yet
- Ericsson Router 6676Document2 pagesEricsson Router 6676farzad.aminzadeNo ratings yet
- Lecture 2: Drawing Basics - P1 : 1Document9 pagesLecture 2: Drawing Basics - P1 : 1roseNo ratings yet
- Pakistan's Corruption Tsunami: Curse, Contours, Causes, Cost, Challenge and CuresDocument173 pagesPakistan's Corruption Tsunami: Curse, Contours, Causes, Cost, Challenge and CuresPakistan's Corruption100% (3)
- The Sine and Cosine Rule QuestionsDocument20 pagesThe Sine and Cosine Rule QuestionsJacob WilliamNo ratings yet
- Measures of Dispersion: Greg C Elvers, PH.DDocument27 pagesMeasures of Dispersion: Greg C Elvers, PH.Dorchuchi100% (1)
- Substation Transformers: Howard Industries, IncDocument12 pagesSubstation Transformers: Howard Industries, IncjrvarnelNo ratings yet
- Human Rights Term PaperDocument18 pagesHuman Rights Term Papersanjog DewanNo ratings yet
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocument1 pageV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNo ratings yet
- HeinonlineDocument8 pagesHeinonlineSyed AsadNo ratings yet
- I-765 Online Filing Instructions - FINALDocument13 pagesI-765 Online Filing Instructions - FINALTrân LêNo ratings yet
- Fill The Form Below:: Sonia SharmaDocument1 pageFill The Form Below:: Sonia SharmaDr BalakrishnaNo ratings yet
- Thermodynamics: Lecture Notes: First Law of ThermodynamicsDocument39 pagesThermodynamics: Lecture Notes: First Law of ThermodynamicsKusmakarNo ratings yet
- Accenture AptitudeDocument122 pagesAccenture AptitudeHarshith P.BNo ratings yet
- Cable - Datasheet - (En) NSSHCÖU, Prysmian - 2013-06-10 - Screened-Power-CableDocument4 pagesCable - Datasheet - (En) NSSHCÖU, Prysmian - 2013-06-10 - Screened-Power-CableA. Muhsin PamungkasNo ratings yet
- Catálogo de Bombas de Diafragma - ARODocument52 pagesCatálogo de Bombas de Diafragma - AROIvan RodrigoNo ratings yet
- V 12 - Schedule of Important Labor Laws - 22.02.2023Document6 pagesV 12 - Schedule of Important Labor Laws - 22.02.2023haris hafeezNo ratings yet
- Quantitative and Qualitative Research in FinanceDocument18 pagesQuantitative and Qualitative Research in FinanceZeeshan Hyder BhattiNo ratings yet
- Deutz 2008 SpecsDocument4 pagesDeutz 2008 SpecsaaasNo ratings yet
- Fama French PDFDocument8 pagesFama French PDFMonzer ShkeirNo ratings yet
- Chap 7Document38 pagesChap 7احمد نصارNo ratings yet
- ADR Case DigestsDocument5 pagesADR Case Digestsanaruto_041609No ratings yet
- 4183 17321 1 PBDocument12 pages4183 17321 1 PBUmiKulsumNo ratings yet
- 20 Preparation Question: Contract: Contract 1 Contract 2 Contract 3 Contract 4Document2 pages20 Preparation Question: Contract: Contract 1 Contract 2 Contract 3 Contract 4SerenaNo ratings yet
- BS 5486-13Document25 pagesBS 5486-13Rachel IngramNo ratings yet
- I LuxDocument24 pagesI LuxNirav M. BhavsarNo ratings yet