
CENG528 5 Geodetic To Crtesian Coord Trans
CENG528 5 Geodetic To Crtesian Coord Trans
You might also like
- F-16 Dynamic ModelDocument19 pagesF-16 Dynamic ModelMuhammad AbdullahNo ratings yet
- Calculus III Study GuideDocument23 pagesCalculus III Study Guideasipasi7No ratings yet
- Nufryk J Garn D Bauer P Farney M The Official Comptia LinuxDocument770 pagesNufryk J Garn D Bauer P Farney M The Official Comptia Linuxtstas80% (5)
- Remedial ReflectionDocument10 pagesRemedial ReflectionEdna Liwliwa C. Gabuyo100% (1)
- Eye Gaze CommunicationDocument26 pagesEye Gaze CommunicationArpithaChaman100% (1)
- Math 215 CH 5 Sec 1Document5 pagesMath 215 CH 5 Sec 1Naseeh writesNo ratings yet
- Datum TransformationDocument6 pagesDatum TransformationTurro ArturoNo ratings yet
- STPP Report Krueger and Transformation Group 2Document27 pagesSTPP Report Krueger and Transformation Group 2ghifariNo ratings yet
- Continuous Curvelet Transform I. Resolution of The Wavefront SetDocument36 pagesContinuous Curvelet Transform I. Resolution of The Wavefront SetKesang BasiNo ratings yet
- UNIT - 7.PDF Engg MathDocument99 pagesUNIT - 7.PDF Engg MathsudersanaviswanathanNo ratings yet
- Directional DerivativeDocument5 pagesDirectional DerivativeJose Luis CondoriNo ratings yet
- (X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheDocument4 pages(X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheAshima ChopraNo ratings yet
- @vectors and Phasors: Scalar QuantitiesDocument2 pages@vectors and Phasors: Scalar Quantitiespeter vanderNo ratings yet
- Fourier TransformDocument8 pagesFourier TransformAnthony LunaNo ratings yet
- Date: March 23, 2010Document13 pagesDate: March 23, 2010Hernán Alonso Maldonado GámezNo ratings yet
- Mathematics For ElectromagnetismDocument20 pagesMathematics For ElectromagnetismPradeep RajasekeranNo ratings yet
- Line and SurfaceDocument40 pagesLine and SurfacesamiNo ratings yet
- Unit 12 Line and Surf'Ace IntegralsDocument60 pagesUnit 12 Line and Surf'Ace IntegralsRiddhima MukherjeeNo ratings yet
- Calculus Iii: CHAPTER 4: Vector Integrals and Integral TheoremsDocument40 pagesCalculus Iii: CHAPTER 4: Vector Integrals and Integral TheoremsRoy VeseyNo ratings yet
- 8 DOF Redundant RobotDocument8 pages8 DOF Redundant RobotXavier WallerNo ratings yet
- Estimating Translation/Deformation Motion Through Phase CorrelationDocument8 pagesEstimating Translation/Deformation Motion Through Phase CorrelationAnonymous 1DK1jQgAGNo ratings yet
- WFToverviewDocument14 pagesWFToverviewBudiman Muhadjir SuryantoNo ratings yet
- The Eötvös Spherical Horizontal Gradiometric Boundary Value Problem - Gravity Anomalies From Gravity Gradients of The Torsion BalanceDocument40 pagesThe Eötvös Spherical Horizontal Gradiometric Boundary Value Problem - Gravity Anomalies From Gravity Gradients of The Torsion BalancegtothNo ratings yet
- Rapport Reit EngDocument62 pagesRapport Reit EngirinaNo ratings yet
- Jo Wood (1996), The Geomorphological Characterisation of Digital Elevation ModelsDocument30 pagesJo Wood (1996), The Geomorphological Characterisation of Digital Elevation ModelsFlori PaizsNo ratings yet
- Geographic Coordinate Conversion - WikipediaDocument13 pagesGeographic Coordinate Conversion - WikipediaMustafa ErcümenNo ratings yet
- Registration Establishes Feature-Based Correspondence Between Related Image PairsDocument56 pagesRegistration Establishes Feature-Based Correspondence Between Related Image PairsDeepti ChaudharyNo ratings yet
- Geometry of CRBDocument4 pagesGeometry of CRBUma MageshwariNo ratings yet
- NSPCH 1Document27 pagesNSPCH 1ishanv_143No ratings yet
- 260A - 1 - Dyadic Analysis and Applications - C T TaiDocument6 pages260A - 1 - Dyadic Analysis and Applications - C T Taipiano790521100% (1)
- And TM-Waves in Waveguides General Cross Section": NovemberDocument9 pagesAnd TM-Waves in Waveguides General Cross Section": Novemberవేలుసామి లింగాసామిNo ratings yet
- Geant4 GPS Users ManualDocument26 pagesGeant4 GPS Users ManualRajNo ratings yet
- Continuous Wavelet Transform and Continuous Multiscale AnalysisDocument18 pagesContinuous Wavelet Transform and Continuous Multiscale Analysissarita yadavNo ratings yet
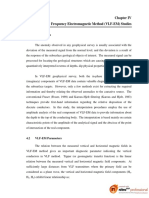
- Very Low Frequency Electromagnetic Method (VLF-EM) StudiesDocument46 pagesVery Low Frequency Electromagnetic Method (VLF-EM) StudiesShofi HawanNo ratings yet
- Updated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Document84 pagesUpdated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Yousef AboamaraNo ratings yet
- D. Development of Collinearity Condition EquationsDocument17 pagesD. Development of Collinearity Condition EquationsWilly WidyatmakaNo ratings yet
- Filament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Document15 pagesFilament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Hiến Đinh VănNo ratings yet
- Electromagnetics 03Document19 pagesElectromagnetics 03Alemoya Lahanda Dafied MarWeNo ratings yet
- Vector Differentiation, The Ñ OperatorDocument10 pagesVector Differentiation, The Ñ OperatorArka RoyNo ratings yet
- Fast and Accurate Polar Fourier Transform: A. Averbuch, R.R. Coifman, D.L. Donoho, M. Elad, M. IsraeliDocument23 pagesFast and Accurate Polar Fourier Transform: A. Averbuch, R.R. Coifman, D.L. Donoho, M. Elad, M. IsraeliIrwan RahmanNo ratings yet
- Div and Curl 9-7Document13 pagesDiv and Curl 9-7Manu KumarNo ratings yet
- 1991 06 Sauer Casdagli JStatPhys EmbedologyDocument38 pages1991 06 Sauer Casdagli JStatPhys EmbedologyOscarNo ratings yet
- Datum TransformationDocument7 pagesDatum TransformationBayode Emmanuel Ozovehe AdeizaNo ratings yet
- Conservative PDFDocument18 pagesConservative PDFAbha SrivastavaNo ratings yet
- Presentation 2D FourierDocument15 pagesPresentation 2D FourierProttoyNo ratings yet
- Greenss TheoremDocument22 pagesGreenss TheoremPraveen RathodNo ratings yet
- Regularization of Feynman IntegralsDocument28 pagesRegularization of Feynman Integralscastillo61No ratings yet
- VM WaveletTransformDocument10 pagesVM WaveletTransformАнна БочароваNo ratings yet
- Conformal MappingDocument8 pagesConformal MappingSudharsan ThiruvenkadamNo ratings yet
- Digital Image Processing 2-: by Dr. Mohannad K. Sabir Al Lami 2019-2020Document42 pagesDigital Image Processing 2-: by Dr. Mohannad K. Sabir Al Lami 2019-2020snake teethNo ratings yet
- Plane SurveyingDocument31 pagesPlane SurveyingBirhad ZiyadNo ratings yet
- An FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5Document6 pagesAn FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5ArchNo ratings yet
- Vojta PaperDocument41 pagesVojta PaperLuljanNo ratings yet
- Mathematics Mini Pro 2 3Document8 pagesMathematics Mini Pro 2 3Preethi PadmanabanNo ratings yet
- Radon TransformDocument9 pagesRadon TransformKonglomerate0% (1)
- Development of Collinearity Condition EquationsDocument17 pagesDevelopment of Collinearity Condition EquationsJuanita RiañoNo ratings yet
- EPWTDocument5 pagesEPWTyazeed7079875No ratings yet
- Tomographic Reconstruction: From Wikipedia, The Free EncyclopediaDocument25 pagesTomographic Reconstruction: From Wikipedia, The Free Encyclopediasibali75No ratings yet
- Gong, Tian Et Al. 2001 - Short-Term Precursor of The GeomagneticDocument10 pagesGong, Tian Et Al. 2001 - Short-Term Precursor of The Geomagneticqaedi961No ratings yet
- Digital Image Processing Unit-2Document6 pagesDigital Image Processing Unit-2Pritesh GuptaNo ratings yet
- Geodayo@yahoo - Co.uk: Xyz A F A FDocument22 pagesGeodayo@yahoo - Co.uk: Xyz A F A FAdeyemi Olukorede DeborahNo ratings yet
- CENG528 4 Geodetic To Crtesian Coord TransDocument10 pagesCENG528 4 Geodetic To Crtesian Coord TransdrdahmanNo ratings yet
- CENG528-2-Projections Geodesy and Coordinate SystemsDocument49 pagesCENG528-2-Projections Geodesy and Coordinate SystemsdrdahmanNo ratings yet
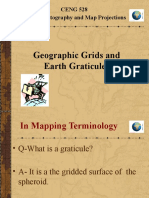
- CENG528-3-Geographic Grids & GradiculesDocument17 pagesCENG528-3-Geographic Grids & GradiculesdrdahmanNo ratings yet
- 05 Leveling 2Document10 pages05 Leveling 2drdahmanNo ratings yet
- Nidal A. Dahman, Ph. D., GISP: Ndahaman@uob - Edu.bhDocument6 pagesNidal A. Dahman, Ph. D., GISP: Ndahaman@uob - Edu.bhdrdahmanNo ratings yet
- Principles of Least SquaresDocument44 pagesPrinciples of Least SquaresdrdahmanNo ratings yet
- Assessment of The Digital Terrain ModelsDocument21 pagesAssessment of The Digital Terrain ModelsdrdahmanNo ratings yet
- CrashDocument18 pagesCrashNana SpNo ratings yet
- Colour Lab Glass ApparatusDocument3 pagesColour Lab Glass ApparatusJo CaubinNo ratings yet
- $$ - The Nature of Language by Three Muslim Thinkers' PerspectiveDocument13 pages$$ - The Nature of Language by Three Muslim Thinkers' PerspectiveMuhammad GaffarNo ratings yet
- SzpE KinyarwandaDocument124 pagesSzpE KinyarwandaDeoNo ratings yet
- Written Test in English - Grade 9: I. Choose A, B, C, D To Complete The Following Sentences (6M)Document1 pageWritten Test in English - Grade 9: I. Choose A, B, C, D To Complete The Following Sentences (6M)api-3727838No ratings yet
- Typing Instructions PunjabiDocument6 pagesTyping Instructions Punjabigurvinder singhNo ratings yet
- Meizhou Chinese Level 5 Homework AnswersDocument7 pagesMeizhou Chinese Level 5 Homework Answersdytmkttif100% (1)
- Duration: Not Set: © Ocr 2023. You May Photocopy This Page. 1 of 35 Created in ExambuilderDocument35 pagesDuration: Not Set: © Ocr 2023. You May Photocopy This Page. 1 of 35 Created in ExambuilderYousif OmerNo ratings yet
- COUNTERPATH. Travelling With Jacques DerridaDocument176 pagesCOUNTERPATH. Travelling With Jacques Derridamilcrepusculos7678No ratings yet
- LogDocument13 pagesLogDinda PutryyyNo ratings yet
- Quick Reference Guide PDFDocument4 pagesQuick Reference Guide PDFCarlos QuispeNo ratings yet
- 8086 Additional NotesDocument8 pages8086 Additional NotesAASTHA KIETNo ratings yet
- Should Writers Use They Own EnglishDocument10 pagesShould Writers Use They Own EnglishYira Melissa CASTILLO RAMOSNo ratings yet
- br100 IrecruitmentDocument33 pagesbr100 Irecruitmentafrodita_nicolauNo ratings yet
- Assessment CRITERION C D YEAR 1 HEALTHDocument5 pagesAssessment CRITERION C D YEAR 1 HEALTHJay KassimNo ratings yet
- Commun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopDocument8 pagesCommun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopSrinivas JangiliNo ratings yet
- Stephen Greenblatt (Editor), Walter Cohen Ph.D. (Editor), Jean E. Howard Ph.D. (Editor), Katharine Eisaman Maus (Editor) - The Norton Shakespeare-W. W. Norton & Company (2008)Document3,387 pagesStephen Greenblatt (Editor), Walter Cohen Ph.D. (Editor), Jean E. Howard Ph.D. (Editor), Katharine Eisaman Maus (Editor) - The Norton Shakespeare-W. W. Norton & Company (2008)The AwakenNo ratings yet
- Naked Bible Podcast Transcript: Dr. Heiser Answers Your Questions About The Book of HebrewsDocument17 pagesNaked Bible Podcast Transcript: Dr. Heiser Answers Your Questions About The Book of HebrewsKevron UndeniablyHandsome SuttonNo ratings yet
- Summative Tests 1Document19 pagesSummative Tests 1Jyrah D. TabagoNo ratings yet
- (OB) Diamond, L. The Global Divergence of Democracies. Cap 8.Document390 pages(OB) Diamond, L. The Global Divergence of Democracies. Cap 8.Mario FuksNo ratings yet
- Hyperion Planning Data Form Design ConsiderationsDocument3 pagesHyperion Planning Data Form Design Considerationsrams08No ratings yet
- Project Report 8th SemDocument34 pagesProject Report 8th Sempikurao1305No ratings yet
- Robot Getting Started Guide Eng 2011 Imperial 2Document188 pagesRobot Getting Started Guide Eng 2011 Imperial 2Fanane Aoulad Taher100% (1)
- 1ST Quarter Exam 21ST CenturyDocument3 pages1ST Quarter Exam 21ST CenturyDj22 Jake100% (1)
- Pilation of HadithDocument1 pagePilation of HadithbabaNo ratings yet
- Software CharacteristicsDocument19 pagesSoftware CharacteristicsABCD EFGHNo ratings yet
- Robotics Set of CodesDocument11 pagesRobotics Set of CodesGinsell Mae Tanteo SarteNo ratings yet






























































































Download as pptx, pdf, or txt
You might also like
- F-16 Dynamic ModelDocument19 pagesF-16 Dynamic ModelMuhammad AbdullahNo ratings yet
- Calculus III Study GuideDocument23 pagesCalculus III Study Guideasipasi7No ratings yet
- Nufryk J Garn D Bauer P Farney M The Official Comptia LinuxDocument770 pagesNufryk J Garn D Bauer P Farney M The Official Comptia Linuxtstas80% (5)
- Remedial ReflectionDocument10 pagesRemedial ReflectionEdna Liwliwa C. Gabuyo100% (1)
- Eye Gaze CommunicationDocument26 pagesEye Gaze CommunicationArpithaChaman100% (1)
- Math 215 CH 5 Sec 1Document5 pagesMath 215 CH 5 Sec 1Naseeh writesNo ratings yet
- Datum TransformationDocument6 pagesDatum TransformationTurro ArturoNo ratings yet
- STPP Report Krueger and Transformation Group 2Document27 pagesSTPP Report Krueger and Transformation Group 2ghifariNo ratings yet
- Continuous Curvelet Transform I. Resolution of The Wavefront SetDocument36 pagesContinuous Curvelet Transform I. Resolution of The Wavefront SetKesang BasiNo ratings yet
- UNIT - 7.PDF Engg MathDocument99 pagesUNIT - 7.PDF Engg MathsudersanaviswanathanNo ratings yet
- Directional DerivativeDocument5 pagesDirectional DerivativeJose Luis CondoriNo ratings yet
- (X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheDocument4 pages(X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheAshima ChopraNo ratings yet
- @vectors and Phasors: Scalar QuantitiesDocument2 pages@vectors and Phasors: Scalar Quantitiespeter vanderNo ratings yet
- Fourier TransformDocument8 pagesFourier TransformAnthony LunaNo ratings yet
- Date: March 23, 2010Document13 pagesDate: March 23, 2010Hernán Alonso Maldonado GámezNo ratings yet
- Mathematics For ElectromagnetismDocument20 pagesMathematics For ElectromagnetismPradeep RajasekeranNo ratings yet
- Line and SurfaceDocument40 pagesLine and SurfacesamiNo ratings yet
- Unit 12 Line and Surf'Ace IntegralsDocument60 pagesUnit 12 Line and Surf'Ace IntegralsRiddhima MukherjeeNo ratings yet
- Calculus Iii: CHAPTER 4: Vector Integrals and Integral TheoremsDocument40 pagesCalculus Iii: CHAPTER 4: Vector Integrals and Integral TheoremsRoy VeseyNo ratings yet
- 8 DOF Redundant RobotDocument8 pages8 DOF Redundant RobotXavier WallerNo ratings yet
- Estimating Translation/Deformation Motion Through Phase CorrelationDocument8 pagesEstimating Translation/Deformation Motion Through Phase CorrelationAnonymous 1DK1jQgAGNo ratings yet
- WFToverviewDocument14 pagesWFToverviewBudiman Muhadjir SuryantoNo ratings yet
- The Eötvös Spherical Horizontal Gradiometric Boundary Value Problem - Gravity Anomalies From Gravity Gradients of The Torsion BalanceDocument40 pagesThe Eötvös Spherical Horizontal Gradiometric Boundary Value Problem - Gravity Anomalies From Gravity Gradients of The Torsion BalancegtothNo ratings yet
- Rapport Reit EngDocument62 pagesRapport Reit EngirinaNo ratings yet
- Jo Wood (1996), The Geomorphological Characterisation of Digital Elevation ModelsDocument30 pagesJo Wood (1996), The Geomorphological Characterisation of Digital Elevation ModelsFlori PaizsNo ratings yet
- Geographic Coordinate Conversion - WikipediaDocument13 pagesGeographic Coordinate Conversion - WikipediaMustafa ErcümenNo ratings yet
- Registration Establishes Feature-Based Correspondence Between Related Image PairsDocument56 pagesRegistration Establishes Feature-Based Correspondence Between Related Image PairsDeepti ChaudharyNo ratings yet
- Geometry of CRBDocument4 pagesGeometry of CRBUma MageshwariNo ratings yet
- NSPCH 1Document27 pagesNSPCH 1ishanv_143No ratings yet
- 260A - 1 - Dyadic Analysis and Applications - C T TaiDocument6 pages260A - 1 - Dyadic Analysis and Applications - C T Taipiano790521100% (1)
- And TM-Waves in Waveguides General Cross Section": NovemberDocument9 pagesAnd TM-Waves in Waveguides General Cross Section": Novemberవేలుసామి లింగాసామిNo ratings yet
- Geant4 GPS Users ManualDocument26 pagesGeant4 GPS Users ManualRajNo ratings yet
- Continuous Wavelet Transform and Continuous Multiscale AnalysisDocument18 pagesContinuous Wavelet Transform and Continuous Multiscale Analysissarita yadavNo ratings yet
- Very Low Frequency Electromagnetic Method (VLF-EM) StudiesDocument46 pagesVery Low Frequency Electromagnetic Method (VLF-EM) StudiesShofi HawanNo ratings yet
- Updated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Document84 pagesUpdated - MT390 - Tutorial 4 - 5 - Spring 2020 - 21Yousef AboamaraNo ratings yet
- D. Development of Collinearity Condition EquationsDocument17 pagesD. Development of Collinearity Condition EquationsWilly WidyatmakaNo ratings yet
- Filament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Document15 pagesFilament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Hiến Đinh VănNo ratings yet
- Electromagnetics 03Document19 pagesElectromagnetics 03Alemoya Lahanda Dafied MarWeNo ratings yet
- Vector Differentiation, The Ñ OperatorDocument10 pagesVector Differentiation, The Ñ OperatorArka RoyNo ratings yet
- Fast and Accurate Polar Fourier Transform: A. Averbuch, R.R. Coifman, D.L. Donoho, M. Elad, M. IsraeliDocument23 pagesFast and Accurate Polar Fourier Transform: A. Averbuch, R.R. Coifman, D.L. Donoho, M. Elad, M. IsraeliIrwan RahmanNo ratings yet
- Div and Curl 9-7Document13 pagesDiv and Curl 9-7Manu KumarNo ratings yet
- 1991 06 Sauer Casdagli JStatPhys EmbedologyDocument38 pages1991 06 Sauer Casdagli JStatPhys EmbedologyOscarNo ratings yet
- Datum TransformationDocument7 pagesDatum TransformationBayode Emmanuel Ozovehe AdeizaNo ratings yet
- Conservative PDFDocument18 pagesConservative PDFAbha SrivastavaNo ratings yet
- Presentation 2D FourierDocument15 pagesPresentation 2D FourierProttoyNo ratings yet
- Greenss TheoremDocument22 pagesGreenss TheoremPraveen RathodNo ratings yet
- Regularization of Feynman IntegralsDocument28 pagesRegularization of Feynman Integralscastillo61No ratings yet
- VM WaveletTransformDocument10 pagesVM WaveletTransformАнна БочароваNo ratings yet
- Conformal MappingDocument8 pagesConformal MappingSudharsan ThiruvenkadamNo ratings yet
- Digital Image Processing 2-: by Dr. Mohannad K. Sabir Al Lami 2019-2020Document42 pagesDigital Image Processing 2-: by Dr. Mohannad K. Sabir Al Lami 2019-2020snake teethNo ratings yet
- Plane SurveyingDocument31 pagesPlane SurveyingBirhad ZiyadNo ratings yet
- An FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5Document6 pagesAn FFT-based Technique For Translation Rotation and Scale-Invariant Image Registration-5Z5ArchNo ratings yet
- Vojta PaperDocument41 pagesVojta PaperLuljanNo ratings yet
- Mathematics Mini Pro 2 3Document8 pagesMathematics Mini Pro 2 3Preethi PadmanabanNo ratings yet
- Radon TransformDocument9 pagesRadon TransformKonglomerate0% (1)
- Development of Collinearity Condition EquationsDocument17 pagesDevelopment of Collinearity Condition EquationsJuanita RiañoNo ratings yet
- EPWTDocument5 pagesEPWTyazeed7079875No ratings yet
- Tomographic Reconstruction: From Wikipedia, The Free EncyclopediaDocument25 pagesTomographic Reconstruction: From Wikipedia, The Free Encyclopediasibali75No ratings yet
- Gong, Tian Et Al. 2001 - Short-Term Precursor of The GeomagneticDocument10 pagesGong, Tian Et Al. 2001 - Short-Term Precursor of The Geomagneticqaedi961No ratings yet
- Digital Image Processing Unit-2Document6 pagesDigital Image Processing Unit-2Pritesh GuptaNo ratings yet
- Geodayo@yahoo - Co.uk: Xyz A F A FDocument22 pagesGeodayo@yahoo - Co.uk: Xyz A F A FAdeyemi Olukorede DeborahNo ratings yet
- CENG528 4 Geodetic To Crtesian Coord TransDocument10 pagesCENG528 4 Geodetic To Crtesian Coord TransdrdahmanNo ratings yet
- CENG528-2-Projections Geodesy and Coordinate SystemsDocument49 pagesCENG528-2-Projections Geodesy and Coordinate SystemsdrdahmanNo ratings yet
- CENG528-3-Geographic Grids & GradiculesDocument17 pagesCENG528-3-Geographic Grids & GradiculesdrdahmanNo ratings yet
- 05 Leveling 2Document10 pages05 Leveling 2drdahmanNo ratings yet
- Nidal A. Dahman, Ph. D., GISP: Ndahaman@uob - Edu.bhDocument6 pagesNidal A. Dahman, Ph. D., GISP: Ndahaman@uob - Edu.bhdrdahmanNo ratings yet
- Principles of Least SquaresDocument44 pagesPrinciples of Least SquaresdrdahmanNo ratings yet
- Assessment of The Digital Terrain ModelsDocument21 pagesAssessment of The Digital Terrain ModelsdrdahmanNo ratings yet
- CrashDocument18 pagesCrashNana SpNo ratings yet
- Colour Lab Glass ApparatusDocument3 pagesColour Lab Glass ApparatusJo CaubinNo ratings yet
- $$ - The Nature of Language by Three Muslim Thinkers' PerspectiveDocument13 pages$$ - The Nature of Language by Three Muslim Thinkers' PerspectiveMuhammad GaffarNo ratings yet
- SzpE KinyarwandaDocument124 pagesSzpE KinyarwandaDeoNo ratings yet
- Written Test in English - Grade 9: I. Choose A, B, C, D To Complete The Following Sentences (6M)Document1 pageWritten Test in English - Grade 9: I. Choose A, B, C, D To Complete The Following Sentences (6M)api-3727838No ratings yet
- Typing Instructions PunjabiDocument6 pagesTyping Instructions Punjabigurvinder singhNo ratings yet
- Meizhou Chinese Level 5 Homework AnswersDocument7 pagesMeizhou Chinese Level 5 Homework Answersdytmkttif100% (1)
- Duration: Not Set: © Ocr 2023. You May Photocopy This Page. 1 of 35 Created in ExambuilderDocument35 pagesDuration: Not Set: © Ocr 2023. You May Photocopy This Page. 1 of 35 Created in ExambuilderYousif OmerNo ratings yet
- COUNTERPATH. Travelling With Jacques DerridaDocument176 pagesCOUNTERPATH. Travelling With Jacques Derridamilcrepusculos7678No ratings yet
- LogDocument13 pagesLogDinda PutryyyNo ratings yet
- Quick Reference Guide PDFDocument4 pagesQuick Reference Guide PDFCarlos QuispeNo ratings yet
- 8086 Additional NotesDocument8 pages8086 Additional NotesAASTHA KIETNo ratings yet
- Should Writers Use They Own EnglishDocument10 pagesShould Writers Use They Own EnglishYira Melissa CASTILLO RAMOSNo ratings yet
- br100 IrecruitmentDocument33 pagesbr100 Irecruitmentafrodita_nicolauNo ratings yet
- Assessment CRITERION C D YEAR 1 HEALTHDocument5 pagesAssessment CRITERION C D YEAR 1 HEALTHJay KassimNo ratings yet
- Commun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopDocument8 pagesCommun Nonlinear Sci Numer Simulat: Erik Sweet, K. Vajravelu, Robert A. Van Gorder, I. PopSrinivas JangiliNo ratings yet
- Stephen Greenblatt (Editor), Walter Cohen Ph.D. (Editor), Jean E. Howard Ph.D. (Editor), Katharine Eisaman Maus (Editor) - The Norton Shakespeare-W. W. Norton & Company (2008)Document3,387 pagesStephen Greenblatt (Editor), Walter Cohen Ph.D. (Editor), Jean E. Howard Ph.D. (Editor), Katharine Eisaman Maus (Editor) - The Norton Shakespeare-W. W. Norton & Company (2008)The AwakenNo ratings yet
- Naked Bible Podcast Transcript: Dr. Heiser Answers Your Questions About The Book of HebrewsDocument17 pagesNaked Bible Podcast Transcript: Dr. Heiser Answers Your Questions About The Book of HebrewsKevron UndeniablyHandsome SuttonNo ratings yet
- Summative Tests 1Document19 pagesSummative Tests 1Jyrah D. TabagoNo ratings yet
- (OB) Diamond, L. The Global Divergence of Democracies. Cap 8.Document390 pages(OB) Diamond, L. The Global Divergence of Democracies. Cap 8.Mario FuksNo ratings yet
- Hyperion Planning Data Form Design ConsiderationsDocument3 pagesHyperion Planning Data Form Design Considerationsrams08No ratings yet
- Project Report 8th SemDocument34 pagesProject Report 8th Sempikurao1305No ratings yet
- Robot Getting Started Guide Eng 2011 Imperial 2Document188 pagesRobot Getting Started Guide Eng 2011 Imperial 2Fanane Aoulad Taher100% (1)
- 1ST Quarter Exam 21ST CenturyDocument3 pages1ST Quarter Exam 21ST CenturyDj22 Jake100% (1)
- Pilation of HadithDocument1 pagePilation of HadithbabaNo ratings yet
- Software CharacteristicsDocument19 pagesSoftware CharacteristicsABCD EFGHNo ratings yet
- Robotics Set of CodesDocument11 pagesRobotics Set of CodesGinsell Mae Tanteo SarteNo ratings yet