Download as pptx, pdf, or txt
You might also like
- Chapter 9 TestbankDocument34 pagesChapter 9 Testbankvx8550_373384312100% (5)
- CPP Presentation Bhumika and GroupDocument22 pagesCPP Presentation Bhumika and GroupPriyanka KumawatNo ratings yet
- A Report of Mini Project Line Following Robot Car Using ArdinoDocument10 pagesA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Density Based Traffic Light Control System Report (Rough)Document19 pagesDensity Based Traffic Light Control System Report (Rough)Kunal AdhikariNo ratings yet
- Gloria V CA DigestDocument3 pagesGloria V CA Digestbeaenriquez100% (3)
- BlindspotDocument37 pagesBlindspotகருத்த பாண்டிNo ratings yet
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDocument5 pagesObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoRichard Kaven SerquinaNo ratings yet
- Automatic Distance ControllerDocument10 pagesAutomatic Distance Controllervivek dongareNo ratings yet
- IJSRP Paper Submission Format Single ColumnDocument4 pagesIJSRP Paper Submission Format Single ColumnKumaR techsNo ratings yet
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDocument7 pagesObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoPramod TNo ratings yet
- Welcome To Our Presentation: Title-Microcontroller Based Car Pre-Accident NotifierDocument15 pagesWelcome To Our Presentation: Title-Microcontroller Based Car Pre-Accident NotifierObsa TesemaNo ratings yet
- Hamid PP 1Document21 pagesHamid PP 1shaikhhamid0803No ratings yet
- Drive Less VechileDocument6 pagesDrive Less VechileParveen KumarNo ratings yet
- IJNTR03060017Document20 pagesIJNTR03060017Devansh AggrawalNo ratings yet
- ADASDocument15 pagesADASA A.DevanandhNo ratings yet
- ICIECE2014AcccidentAvoidance65 67Document4 pagesICIECE2014AcccidentAvoidance65 67Chibueze EzeokaforNo ratings yet
- AdasDocument24 pagesAdasA A.DevanandhNo ratings yet
- Final ReviewDocument21 pagesFinal ReviewjyoshnaNo ratings yet
- Research PaperDocument8 pagesResearch PaperAsad NoorNo ratings yet
- Smart City Traffic Control For Ambulance With Accident DtectionDocument47 pagesSmart City Traffic Control For Ambulance With Accident DtectionRupam Das100% (2)
- Vehicle Theft Detection and Secure System Using ArduinoDocument4 pagesVehicle Theft Detection and Secure System Using ArduinoAditya BobadeNo ratings yet
- FinalpptDocument20 pagesFinalpptjyotishmoyhazarika72No ratings yet
- Smart Helmet Alcohol Detection With Accident SMS Alert SystemDocument19 pagesSmart Helmet Alcohol Detection With Accident SMS Alert SystemTony StarkNo ratings yet
- Gate 2024 AeDocument13 pagesGate 2024 Aeabhaymadathil4No ratings yet
- Car Parking SensorDocument21 pagesCar Parking Sensormohamed elfeky100% (2)
- RudraDocument17 pagesRudraHimadri ShuklaNo ratings yet
- Collision AvoidanceDocument5 pagesCollision AvoidanceEmariel LumagbasNo ratings yet
- Project Report CSDocument13 pagesProject Report CS2K19-EC-004 Aakash SoniNo ratings yet
- Density Based Traffic Control SystemDocument18 pagesDensity Based Traffic Control SystemSwathi Kohli63% (8)
- 4th Yr Report WritingDocument13 pages4th Yr Report Writingammybachu2728No ratings yet
- Line Follower Vehicle.: Professor: M.C Joaquín Saucedo Barajas. Course: Advanced ProgrammingDocument9 pagesLine Follower Vehicle.: Professor: M.C Joaquín Saucedo Barajas. Course: Advanced ProgrammingAbraham Humberto Pedroza FloresNo ratings yet
- Review On Night Vision Technology in Automobiles: Abhishek - Bhattacharya@sharda - Ac.inDocument6 pagesReview On Night Vision Technology in Automobiles: Abhishek - Bhattacharya@sharda - Ac.insai yashasNo ratings yet
- Adas ContentsDocument8 pagesAdas ContentsM venkata Subramanyam100% (1)
- Vehicle Speed Detection Using Arduino and IR Sensors: P.Nihanth, P.Sahithi, R.Sreeja Dr.P.K.PradhanDocument4 pagesVehicle Speed Detection Using Arduino and IR Sensors: P.Nihanth, P.Sahithi, R.Sreeja Dr.P.K.PradhanDINESH 18EEO3No ratings yet
- Saurabh Paper PresentationDocument10 pagesSaurabh Paper PresentationrahulNo ratings yet
- 11-06-2022-1654946371-6-.-5. Engg - Road Safety System Based On Arduino Built With Eye Blink SensorDocument10 pages11-06-2022-1654946371-6-.-5. Engg - Road Safety System Based On Arduino Built With Eye Blink SensorImpact JournalsNo ratings yet
- Self Driving Car Model Using Raspberry Pi IJERTV9IS020086Document5 pagesSelf Driving Car Model Using Raspberry Pi IJERTV9IS020086Sai TejaNo ratings yet
- Road Damage Monitoring and ControlDocument50 pagesRoad Damage Monitoring and ControlRaji PNo ratings yet
- Night Vision SystemDocument12 pagesNight Vision SystemAnshul Aggarwal100% (1)
- Diminishing Road Accidents On Sharp Curves Using ArduinoDocument4 pagesDiminishing Road Accidents On Sharp Curves Using ArduinoIJARP PublicationsNo ratings yet
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Document11 pagesArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbNo ratings yet
- 29 Institute of Engineering & TechnologyDocument27 pages29 Institute of Engineering & Technologyveer bahadurNo ratings yet
- Mini ProjectDocument12 pagesMini ProjectsreejaNo ratings yet
- IJCRT1802289Document4 pagesIJCRT180228920EE090 -SATHISH.MNo ratings yet
- Automatic Two Wheeler Licensing SystemDocument4 pagesAutomatic Two Wheeler Licensing SystemVenkatesh Venkat100% (1)
- Black Box SystemDocument11 pagesBlack Box Systemabzalbagawan48No ratings yet
- Obstacle Avoider Robotic Vehicle: Working PrincipleDocument3 pagesObstacle Avoider Robotic Vehicle: Working PrincipleMegharaj ShivaramNo ratings yet
- IoT Report 2020-21Document5 pagesIoT Report 2020-21Yash GuptaNo ratings yet
- Automatic Vehicle Control Using Sensors: ISSN: 2278 - 0211 (Online)Document7 pagesAutomatic Vehicle Control Using Sensors: ISSN: 2278 - 0211 (Online)Sandhya NatarajanNo ratings yet
- Ijireeice 4Document4 pagesIjireeice 4Sunil KumbarNo ratings yet
- Project By: MOHAMMED KHALID ALI KHAN (160517733302) Syed Shariq Hussain (160517733034) Sohail Askari (160517733073)Document22 pagesProject By: MOHAMMED KHALID ALI KHAN (160517733302) Syed Shariq Hussain (160517733034) Sohail Askari (160517733073)Samnan KhaledNo ratings yet
- Autonomous_Mobility_VehicleDocument7 pagesAutonomous_Mobility_VehicleRoshan Singh RajputNo ratings yet
- Chapter-1 Literature Survey: Aim of Our ProjectDocument4 pagesChapter-1 Literature Survey: Aim of Our ProjectCatherine Protas100% (1)
- Self_Driving_car(Main Project)Document34 pagesSelf_Driving_car(Main Project)weblab123458No ratings yet
- Autonomous VehiclesDocument19 pagesAutonomous VehiclesSuprithaNo ratings yet
- 1.drowsy Driver Detection and AlertsDocument76 pages1.drowsy Driver Detection and AlertsPolyster100% (1)
- Fin Irjmets1656865202Document3 pagesFin Irjmets1656865202thandarwinNo ratings yet
- Automatic Breaking SystemDocument9 pagesAutomatic Breaking SystemASHUTOSH SAHOOLME011 (LME011)No ratings yet
- Automobile Black Box System For Accident AnalysisDocument15 pagesAutomobile Black Box System For Accident AnalysisRajesh VishwakarmaNo ratings yet
- Literature SurveyDocument8 pagesLiterature SurveyTejaswi k kNo ratings yet
- Smart Camera: Revolutionizing Visual Perception with Computer VisionFrom EverandSmart Camera: Revolutionizing Visual Perception with Computer VisionNo ratings yet
- LSM MockDocument5 pagesLSM MockKazi Rafsan NoorNo ratings yet
- Social Work As A ProfessionDocument4 pagesSocial Work As A ProfessionIssa KhalidNo ratings yet
- Capr-Iii En4115 PDFDocument49 pagesCapr-Iii En4115 PDFYT GAMERSNo ratings yet
- 2013 848evo DucatiOmahaDocument140 pages2013 848evo DucatiOmahaFabian Alejandro Ramos SandovalNo ratings yet
- M15 Joining Processes - Welding Part 1Document52 pagesM15 Joining Processes - Welding Part 1Gita SaragihNo ratings yet
- Of Mice and Men EssayDocument7 pagesOf Mice and Men Essayjon782No ratings yet
- Aromaterapia Emocional - doTERRADocument2 pagesAromaterapia Emocional - doTERRAAlvaro Andre Diaz100% (1)
- Lesson A Worksheets. Print or Copy in Your Notebook-1Document3 pagesLesson A Worksheets. Print or Copy in Your Notebook-1Martha Lucia Arcila HenaoNo ratings yet
- TJC History 2021 BrochureDocument27 pagesTJC History 2021 BrochureMelissa TeoNo ratings yet
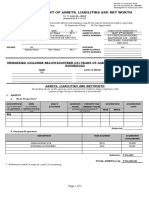
- Sworn Statement of Assets, Liabilities and Net WorthDocument2 pagesSworn Statement of Assets, Liabilities and Net WorthKal El DadiNo ratings yet
- Explore (As) : Types of Commission and InterestsDocument4 pagesExplore (As) : Types of Commission and InterestsTiffany Joy Lencioco GambalanNo ratings yet
- Ax88796B With Ali M3602 Mcu Reference Schematic IndexDocument4 pagesAx88796B With Ali M3602 Mcu Reference Schematic IndexdistefanoNo ratings yet
- Store Name: United Food Company Kaust: It Code DescriptionDocument20 pagesStore Name: United Food Company Kaust: It Code DescriptionFazlul RifazNo ratings yet
- Vu+Premium+2K+TV Specification 32UADocument2 pagesVu+Premium+2K+TV Specification 32UAMr jhonNo ratings yet
- Final NHD Annotated BibliographyDocument7 pagesFinal NHD Annotated Bibliographyapi-616585007No ratings yet
- CWall Ex1Document5 pagesCWall Ex1Virginia gabyella saraunNo ratings yet
- Oops File-Converted-1 PDFDocument183 pagesOops File-Converted-1 PDFNikhil Yadav67% (6)
- Industry ProfileDocument9 pagesIndustry ProfilesarathNo ratings yet
- Dilla University College of Engineering and Technology School of Computing and Informatics Department of Computer ScienceDocument11 pagesDilla University College of Engineering and Technology School of Computing and Informatics Department of Computer ScienceTekalegnNo ratings yet
- BMR 2105 PDFDocument6 pagesBMR 2105 PDFSitoraKodirovaNo ratings yet
- Wepik Strengthening Digital Defenses An in Depth Exploration of Cyber Security 20231121043209BlIPDocument12 pagesWepik Strengthening Digital Defenses An in Depth Exploration of Cyber Security 20231121043209BlIPsuchdev darshanNo ratings yet
- Punsalan, Jr. vs. Vda. de LacsamanaDocument11 pagesPunsalan, Jr. vs. Vda. de LacsamanaLoubert BartolomeNo ratings yet
- Perfecto Floresca Vs Philex Mining CorporationDocument11 pagesPerfecto Floresca Vs Philex Mining CorporationDelsie FalculanNo ratings yet
- ProsidingDocument13 pagesProsidingAlfi Amalia S.E.I, M.E.INo ratings yet
- Bal Natu - Glimpses of The God-Man, Meher Baba - 1943-1948 (Vol. I) (1997)Document431 pagesBal Natu - Glimpses of The God-Man, Meher Baba - 1943-1948 (Vol. I) (1997)Kumar KNo ratings yet
- People Vs Vicente MenilDocument2 pagesPeople Vs Vicente MenilMarco Arpon100% (1)
- Reading PashtoDocument17 pagesReading PashtoUmer Khan0% (1)
- LAS - Week 3 FunctionsDocument15 pagesLAS - Week 3 FunctionsLeywila Mae Yo BianesNo ratings yet