Download as pptx, pdf, or txt
You might also like
- Ball ScrewDocument3 pagesBall ScrewAngel Moran PachecoNo ratings yet
- ENSC3001 - Exam NotesDocument13 pagesENSC3001 - Exam NotesGeoffreyWanNo ratings yet
- Velocidad Critica de Un EjeDocument12 pagesVelocidad Critica de Un EjeFranciscoNo ratings yet
- CH-10 Plane Motion of Rigid Bodies 2Document13 pagesCH-10 Plane Motion of Rigid Bodies 2Anshuman SinghNo ratings yet
- General Physics 1Document194 pagesGeneral Physics 1ClaudeXD76% (29)
- Part C Dynamics and Statics of Rigid Body Chapter 5 Rotation of A Rigid Body About A Fixed AxisDocument26 pagesPart C Dynamics and Statics of Rigid Body Chapter 5 Rotation of A Rigid Body About A Fixed AxisBảo NgânNo ratings yet
- Suspension LectureDocument41 pagesSuspension Lecturealex.korobov100% (4)
- PHY 303K - Florin - Exam IV - Fall 2013Document42 pagesPHY 303K - Florin - Exam IV - Fall 2013Roger100% (1)
- GyroscopeDocument7 pagesGyroscopeRajesh SarkarNo ratings yet
- Home Drive - Index Gears GearboxesDocument8 pagesHome Drive - Index Gears Gearboxesnayan patelNo ratings yet
- Braking System 2Document22 pagesBraking System 2chaubalrohitNo ratings yet
- FirstlyDocument5 pagesFirstlynwg6ssdm8rNo ratings yet
- Epicyclic Gear Train Write UpDocument8 pagesEpicyclic Gear Train Write UpkulkajinkyaNo ratings yet
- Dinamika Rotasi-1Document24 pagesDinamika Rotasi-1Ulfaa FauzanaaNo ratings yet
- Projectile Motion AllDocument5 pagesProjectile Motion AllKOMALNo ratings yet
- Civil Engineering Mechanics CVG2149: Kinematics of Rigid Bodies (CH. 15)Document7 pagesCivil Engineering Mechanics CVG2149: Kinematics of Rigid Bodies (CH. 15)Kaiss Nael OsmanNo ratings yet
- CH 12Document24 pagesCH 12api-314383788No ratings yet
- Ch5 & 6 ReviewDocument43 pagesCh5 & 6 ReviewAnson ChanNo ratings yet
- Gear Train: - Simple - Compound - EpicyclicDocument18 pagesGear Train: - Simple - Compound - EpicyclicGaurav AgarwalNo ratings yet
- GearsDocument35 pagesGearsMudit JainNo ratings yet
- Advanced Gear Analysis: Epicyclic GearingDocument15 pagesAdvanced Gear Analysis: Epicyclic GearingNora GuzmanNo ratings yet
- Machine Design 2013Document44 pagesMachine Design 2013cooLkiD1412No ratings yet
- Unit 7 Geartrains 130404060224 Phpapp01Document25 pagesUnit 7 Geartrains 130404060224 Phpapp01SHRIMAN SRINIVASAN (RA1811018010044)No ratings yet
- Ch10 SSMDocument18 pagesCh10 SSMJuanca AbadNo ratings yet
- E11 - Study of MechanismsDocument8 pagesE11 - Study of MechanismsMahadevanRavichandranNo ratings yet
- Rotation About A Fixed PointDocument31 pagesRotation About A Fixed PointGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Dynamics1 9Document25 pagesDynamics1 9caganhasNo ratings yet
- Chapter 13 Kinetics of Particle - Force & AccelerationDocument31 pagesChapter 13 Kinetics of Particle - Force & AccelerationDawood AbdullahNo ratings yet
- Test 3Document11 pagesTest 3Ha ViNo ratings yet
- Week 7 (Online Mode) SlidesDocument23 pagesWeek 7 (Online Mode) SlidesDawood AbdullahNo ratings yet
- Planar Kinematics of A Rigid BodyDocument13 pagesPlanar Kinematics of A Rigid BodyMagicWand2No ratings yet
- Chapter 1 Lecturer - Gear DriveDocument46 pagesChapter 1 Lecturer - Gear Drivehamry0% (1)
- Unit 4Document39 pagesUnit 4rajashekar reddy nallalaNo ratings yet
- Gear Trains Definition and Types With PDFDocument4 pagesGear Trains Definition and Types With PDFAneez ShresthaNo ratings yet
- Industrial Robot AnalysisDocument20 pagesIndustrial Robot AnalysiselkhawadNo ratings yet
- Adv Gear Analysis 6Document15 pagesAdv Gear Analysis 6abhishek_negi_41No ratings yet
- Gear Ratio Speed of Driving Shaft Speed of Driven Shaft: Planetary Gear Set Sun Gear Planet Gear Ring GearDocument9 pagesGear Ratio Speed of Driving Shaft Speed of Driven Shaft: Planetary Gear Set Sun Gear Planet Gear Ring GearMy ProNo ratings yet
- Dynamics of Circular MotionDocument51 pagesDynamics of Circular MotionEsther oluwatosin AdeyemiNo ratings yet
- ME-329 - Mechanical Vibrations: Dated: 16 March, 2021Document41 pagesME-329 - Mechanical Vibrations: Dated: 16 March, 2021Muhammad Junaid JahangirNo ratings yet
- Module4geartrains 190118175406Document41 pagesModule4geartrains 190118175406Mohamed El.shenawYNo ratings yet
- Gear Trains: Gear Train Train of Toothed WheelsDocument8 pagesGear Trains: Gear Train Train of Toothed WheelsDeep PatelNo ratings yet
- TOM Lab ManualDocument47 pagesTOM Lab Manualsrihari raoNo ratings yet
- Chap-8 Gear TrainDocument18 pagesChap-8 Gear TrainAlysNo ratings yet
- Chapter 13 Angular ImpulseDocument15 pagesChapter 13 Angular ImpulseRoger MelkoNo ratings yet
- Mechanics L7Document49 pagesMechanics L7Charlie LaiNo ratings yet
- Planetary Gear Trains: MEE 341 Chap 9 1Document13 pagesPlanetary Gear Trains: MEE 341 Chap 9 1Memeber JNo ratings yet
- GyroscopeDocument7 pagesGyroscopevijay2293No ratings yet
- Numerical Methods For Inverse Kinematics: 1 Problem DescriptionDocument8 pagesNumerical Methods For Inverse Kinematics: 1 Problem DescriptionMohamed NabilNo ratings yet
- Gerak Rotasi Terhadap Sumbu TetapDocument60 pagesGerak Rotasi Terhadap Sumbu TetapNikenNo ratings yet
- Mechanics 5 Dynamics of A Rigid BodyDocument16 pagesMechanics 5 Dynamics of A Rigid BodyClarence PieterszNo ratings yet
- MIN 301 Dynamics of Machines ExperimentsDocument12 pagesMIN 301 Dynamics of Machines ExperimentsSaifullah AhmadNo ratings yet
- Gear Train PDFDocument18 pagesGear Train PDFamanuelfitsum589No ratings yet
- Machine Dynamics Lab ManualDocument18 pagesMachine Dynamics Lab ManualRishi ShuklaNo ratings yet
- Homwork For PhysicsDocument2 pagesHomwork For PhysicsLovkesh GurjarNo ratings yet
- Industrial Robot AnalysisDocument20 pagesIndustrial Robot AnalysiselkhawadNo ratings yet
- Balancing of Reciprocating MassesDocument29 pagesBalancing of Reciprocating MassesPraful KhondeNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- Gear Trains: 8.1. Angular Velocity RatioDocument16 pagesGear Trains: 8.1. Angular Velocity RatioaddisudagneNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Gear-Shaping Machine, Model 5M14Document92 pagesGear-Shaping Machine, Model 5M14Tanzir Musa100% (2)
- DAE Mechanical Y2Document116 pagesDAE Mechanical Y2Faiz Ur RehmanNo ratings yet
- Peaucelier (1864) Discovered An Exact Straight-Line Mechanism of Eight Bars and Six PinsDocument2 pagesPeaucelier (1864) Discovered An Exact Straight-Line Mechanism of Eight Bars and Six PinsNaina AgrawalNo ratings yet
- Exercise Answers 2 Asal Physics WBDocument3 pagesExercise Answers 2 Asal Physics WBalexandre ricciNo ratings yet
- DH - Ch2 Fundamentals of Rigid Kinematics - 4x3Document10 pagesDH - Ch2 Fundamentals of Rigid Kinematics - 4x3Hà Giang NguyễnNo ratings yet
- 1-D Kinematics Study GuideDocument2 pages1-D Kinematics Study GuideJaydeepNo ratings yet
- Acs Tech90Document191 pagesAcs Tech90ramjoce100% (1)
- Ch.6 Solucionario Mechanisms and Dynamics of MachineryDocument44 pagesCh.6 Solucionario Mechanisms and Dynamics of MachineryNico Mingo100% (1)
- Inc - JR Star Co Super Chaina2022-23 Physics Teaching Exam Schedule Paper Setting Allotment Upto Dusshera 29.06.225.00PMDocument31 pagesInc - JR Star Co Super Chaina2022-23 Physics Teaching Exam Schedule Paper Setting Allotment Upto Dusshera 29.06.225.00PMRobin HootNo ratings yet
- Motion 1 QPDocument15 pagesMotion 1 QPzeemal ayyazNo ratings yet
- Sprocket Catalog (Powerdrive - Com)Document82 pagesSprocket Catalog (Powerdrive - Com)PowerDriveNo ratings yet
- Lab3a 2019Document10 pagesLab3a 2019Olivia PowerNo ratings yet
- Auma India PVT LTD PDFDocument17 pagesAuma India PVT LTD PDFMallikarjun ChakinalaNo ratings yet
- Iugaza Tom2012 - CH1-5 PDFDocument95 pagesIugaza Tom2012 - CH1-5 PDFaaima malikNo ratings yet
- Input Gear (20 Tooth)Document1 pageInput Gear (20 Tooth)Ana-Maria BogatuNo ratings yet
- CATIA Kinematics: 3DEXPERIENCE® R2019xDocument47 pagesCATIA Kinematics: 3DEXPERIENCE® R2019xGadhireddy Ashokkumar ReddyNo ratings yet
- Acceleration Analysis MethodDocument12 pagesAcceleration Analysis MethodKlucifer XinNo ratings yet
- Mechanics For Engineers DYNAMICS ChapterDocument88 pagesMechanics For Engineers DYNAMICS ChapterCarmela SacdalanNo ratings yet
- Vector Mechanics For Engineers: Dynamics: Twelfth EditionDocument100 pagesVector Mechanics For Engineers: Dynamics: Twelfth EditionFady MagedNo ratings yet
- Introduction To Stiffness MethodDocument14 pagesIntroduction To Stiffness Methodapi-3813327100% (1)
- Kinematics of ParticlesDocument99 pagesKinematics of Particlesrevit37100% (3)
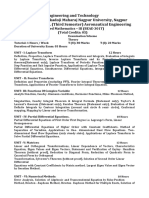
- Engineering and Technology Rashtrasant Tukadoji Maharaj Nagpur University, Nagpur Syllabus For B.E. (Third Semester) Aeronautical EngineeringDocument85 pagesEngineering and Technology Rashtrasant Tukadoji Maharaj Nagpur University, Nagpur Syllabus For B.E. (Third Semester) Aeronautical Engineeringprabhat ranjan mishraNo ratings yet
- Direct Kinematics Problem in Robotics:: Denavit-Hartenberg ConventionDocument12 pagesDirect Kinematics Problem in Robotics:: Denavit-Hartenberg ConventionSatish HSNo ratings yet
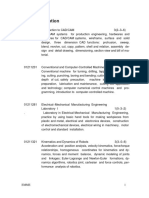
- Course Descriptions Electrical Mechanical Manufacturing EngineeringDocument8 pagesCourse Descriptions Electrical Mechanical Manufacturing EngineeringKristi GjokaNo ratings yet
- SME1307Document114 pagesSME1307Bakheit LayliNo ratings yet
- Introduction To Concepts in RoboticsDocument22 pagesIntroduction To Concepts in Roboticsharikiran3285No ratings yet
- Physics1 0608Document18 pagesPhysics1 0608tadruidNo ratings yet
- Cs ProjectDocument32 pagesCs ProjectAditya TenguriaNo ratings yet