Download as ppt, pdf, or txt
You might also like
- 9.1 Cisco CCST WhiteboardDocument4 pages9.1 Cisco CCST Whiteboardamit_post2000100% (1)
- AWS Module 2 - Cloud Economics and BillingDocument67 pagesAWS Module 2 - Cloud Economics and Billingdsadasdasdas100% (4)
- Homework 1 ConverterDocument4 pagesHomework 1 ConverterGuilherme E Tamira Lopez0% (3)
- OXO Admin Training PresentationDocument67 pagesOXO Admin Training PresentationDhexter Villa50% (2)
- CH 06Document33 pagesCH 06Dan StrutheNo ratings yet
- C-Transient ResponseDocument17 pagesC-Transient ResponseAnanthan SrijithNo ratings yet
- Automatic Control (Part 2) : Frequency Domain AnalysisDocument4 pagesAutomatic Control (Part 2) : Frequency Domain AnalysisjachalfonsiniNo ratings yet
- Lectures 15: Feedback Controller DesignDocument12 pagesLectures 15: Feedback Controller DesignNishant Kumar GuptaNo ratings yet
- A Generalised Harmonic Linearisation Method For Power Converters Input Output Impedance CalculationDocument7 pagesA Generalised Harmonic Linearisation Method For Power Converters Input Output Impedance Calculationthirawad.sNo ratings yet
- BE Project Template Dec 18Document14 pagesBE Project Template Dec 18Vedant JoshiNo ratings yet
- Lec 2 PID ControlDocument8 pagesLec 2 PID ControlAep Kusman HeriyantoNo ratings yet
- Powersys 3Document39 pagesPowersys 3setsindia3735No ratings yet
- Powersys 4Document39 pagesPowersys 4setsindia3735No ratings yet
- A Report: Verilog-A Macromodel For Resistive PotentiometersDocument15 pagesA Report: Verilog-A Macromodel For Resistive PotentiometersDilan ByteNo ratings yet
- State Space Actuator LimitationsDocument10 pagesState Space Actuator LimitationsKevin RussellNo ratings yet
- Microcontroller Based Active and Reactive Power Measurement PDFDocument7 pagesMicrocontroller Based Active and Reactive Power Measurement PDFgeniunetNo ratings yet
- Signal-&-System NoteDocument31 pagesSignal-&-System NotePartha BanerjeeNo ratings yet
- BEV10403 - Week 2 - InductorDocument38 pagesBEV10403 - Week 2 - InductorShafiq NasriNo ratings yet
- Li 2018Document13 pagesLi 2018El ABBADI RedaNo ratings yet
- Chapter 2: Study of Inductive-Capacitive Series Circuits Using The Simulink Software PackageDocument23 pagesChapter 2: Study of Inductive-Capacitive Series Circuits Using The Simulink Software PackageLord KingNo ratings yet
- Mchunu Lindokuhle CO2 Pre-PracDocument10 pagesMchunu Lindokuhle CO2 Pre-PracLungani MthethwaNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Synchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Document5 pagesSynchronous Buck Boost Converter For Energy Harvesting Application IJERTV3IS061055Rick MaityNo ratings yet
- Chap 6 Control System I - Web 1Document24 pagesChap 6 Control System I - Web 1吳晨瑋No ratings yet
- Special Topics in Power - 1Document38 pagesSpecial Topics in Power - 1Ravichandran SekarNo ratings yet
- TENCONSpring 2013 6584454Document5 pagesTENCONSpring 2013 6584454Asad HameedNo ratings yet
- EE2020 - M00b - W01 - WI17 (V03)Document168 pagesEE2020 - M00b - W01 - WI17 (V03)Jos Hua MaNo ratings yet
- 10 1002@etep 669Document11 pages10 1002@etep 669dankorankoNo ratings yet
- Physics Exp 3 Lab RepDocument12 pagesPhysics Exp 3 Lab RepNor Iftiha AzizNo ratings yet
- An Educational Tool For DC-DC ConverterDocument4 pagesAn Educational Tool For DC-DC ConvertercratmanNo ratings yet
- Adaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemDocument9 pagesAdaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemAbdelghani El OugliNo ratings yet
- Current-Sensorless Predictive Control For DC-DC ConvertersDocument6 pagesCurrent-Sensorless Predictive Control For DC-DC ConvertersKannan KochumonNo ratings yet
- Estimating Dynamics of Switching Converters Using System Identification TechniqueDocument8 pagesEstimating Dynamics of Switching Converters Using System Identification TechniqueSmakshi ChoudharyNo ratings yet
- Mathematical Modeling 1Document68 pagesMathematical Modeling 1hermelaNo ratings yet
- Tac 1971 1099844Document6 pagesTac 1971 1099844Nabila Aulia RamadhaniNo ratings yet
- MIE346 - Tutorial Problems 1 - Transfer Functions, Frequency Domain Analysis, Bode Plots, FiltersDocument148 pagesMIE346 - Tutorial Problems 1 - Transfer Functions, Frequency Domain Analysis, Bode Plots, FiltersSara GaoNo ratings yet
- Department of Electrical Engineering: M.B.M Engineering College, JodhpurDocument16 pagesDepartment of Electrical Engineering: M.B.M Engineering College, JodhpurPawan KhatnawaliaNo ratings yet
- Chapter 1 - v4Document29 pagesChapter 1 - v4方包No ratings yet
- Ze050202290236 1Document9 pagesZe050202290236 1abhishek tiwariNo ratings yet
- CHAPTER 1: Plant Process Characterization and PID: TheoryDocument10 pagesCHAPTER 1: Plant Process Characterization and PID: Theorynttu53No ratings yet
- Small Signal Transfer Functions and Mathematical Model of The Boost Power ConverterDocument6 pagesSmall Signal Transfer Functions and Mathematical Model of The Boost Power ConverterNtokozo HlatshwayoNo ratings yet
- Adaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemDocument9 pagesAdaptive Fuzzy Sliding Mode Based MPPT Controller For A Photovoltaic Water Pumping SystemIAES IJPEDSNo ratings yet
- TY - ECE - SEM6 - Notes - Unit I (2) - CS - AAHDocument8 pagesTY - ECE - SEM6 - Notes - Unit I (2) - CS - AAHAgha HusainNo ratings yet
- Part Ii 2019-1Document52 pagesPart Ii 2019-1yilunzhangNo ratings yet
- Control in LabVIEW PDFDocument104 pagesControl in LabVIEW PDFJuan PabloNo ratings yet
- 1ET1040506 Sensors and Transducers Open ElectiveDocument2 pages1ET1040506 Sensors and Transducers Open ElectivePatel SarkarNo ratings yet
- Bishop-Modern-Control-Systems-with-LabVIEWDocument104 pagesBishop-Modern-Control-Systems-with-LabVIEWRaúl Nicolás Huerta BravoNo ratings yet
- CH II - Kinematics of A Particle AllDocument113 pagesCH II - Kinematics of A Particle Allworkiemelkamu400No ratings yet
- Lesson 5: Mathematical Models of Electrical Control System ComponentsDocument15 pagesLesson 5: Mathematical Models of Electrical Control System ComponentsHasan AljabaliNo ratings yet
- PSD W07S01 Z Transform 3Document63 pagesPSD W07S01 Z Transform 3Jimmi NadapdapNo ratings yet
- Harmonic Effects Caused by Large Scale PV InstallaDocument7 pagesHarmonic Effects Caused by Large Scale PV InstallaMUHAMAD ZAHIDNo ratings yet
- Feedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-6 Mathematical Modelling of Electrical & Electronic SystemsSuyash Dahake VlogsNo ratings yet
- Week 7 - Control System Part 2Document33 pagesWeek 7 - Control System Part 2Amar MursyidNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
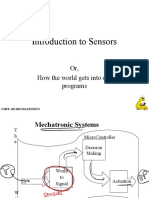
- Introduction To Sensors: Or, How The World Gets Into Our ProgramsDocument38 pagesIntroduction To Sensors: Or, How The World Gets Into Our ProgramsAjay BabuNo ratings yet
- System Modeling: 1 Chapter 2ADocument16 pagesSystem Modeling: 1 Chapter 2Aيوسف الأحمديNo ratings yet
- I. Mathematical Models: Controller SensorDocument19 pagesI. Mathematical Models: Controller SensorKelvin KongNo ratings yet
- Mcs Unit 2.1 PDFDocument59 pagesMcs Unit 2.1 PDFBhargav PraneethNo ratings yet
- Symmetry: Controller For The Grid-Connected Microinverter Output Current TrackingDocument13 pagesSymmetry: Controller For The Grid-Connected Microinverter Output Current TrackingAhmar Hayat KhanNo ratings yet
- Ziegler-Nichols Tuning Method: Understanding The PID ControllerDocument13 pagesZiegler-Nichols Tuning Method: Understanding The PID ControllerSaran SelvanNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Anchor Smart Controller Leaflet 231221Document2 pagesAnchor Smart Controller Leaflet 231221kannanNo ratings yet
- Prog IDSDocument10 pagesProg IDSsteepa22No ratings yet
- ZKFinger10.0 User GuideDocument2 pagesZKFinger10.0 User GuideMohammedNo ratings yet
- PCMate V 7 5 Printing GuideDocument89 pagesPCMate V 7 5 Printing Guiderutmiramontes2No ratings yet
- 1.9 Block Diagram: Philips SemiconductorsDocument1 page1.9 Block Diagram: Philips SemiconductorsutsabNo ratings yet
- Mcafee Active Response 2.4.x Product Guide 2-21-2022Document85 pagesMcafee Active Response 2.4.x Product Guide 2-21-2022nlly4uNo ratings yet
- WK 01Document328 pagesWK 01Gaye VillapandoNo ratings yet
- Flight Reservation SystemDocument15 pagesFlight Reservation SystemannuNo ratings yet
- Hardware, Software and The 7 Components of It Infrastructure 1. Computer Hardware PlatformsDocument2 pagesHardware, Software and The 7 Components of It Infrastructure 1. Computer Hardware PlatformsAmirul NorisNo ratings yet
- Integrative ProgrammingDocument3 pagesIntegrative ProgrammingRodjean SimballaNo ratings yet
- JVM TuningDocument27 pagesJVM TuningemitraNo ratings yet
- PD Download Fs 1608075814173252Document1 pagePD Download Fs 1608075814173252straulleNo ratings yet
- Command Reference: Optima/Econo DMC-2xxx SeriesDocument263 pagesCommand Reference: Optima/Econo DMC-2xxx SeriesAnimesh GhoshNo ratings yet
- Tech Tip Sauer Danfoss ControllerDocument37 pagesTech Tip Sauer Danfoss ControllerSantos C Pech Dzul100% (1)
- Some Aspects of The Design of Balanced Rectifier Modulators For Precision Applications by D. G., PH.D., Associate MemberDocument1 pageSome Aspects of The Design of Balanced Rectifier Modulators For Precision Applications by D. G., PH.D., Associate MembershirtquittersNo ratings yet
- Manual Kenwood MC-60ADocument2 pagesManual Kenwood MC-60AArnaldoNo ratings yet
- Chapter 1 - Introduction To ElectronicsDocument44 pagesChapter 1 - Introduction To Electronicssulthan_81No ratings yet
- Huawei Bts 3900 Series ConfigurationDocument5 pagesHuawei Bts 3900 Series ConfigurationminoothwinNo ratings yet
- Umer Farooq - Network Support EngineerDocument3 pagesUmer Farooq - Network Support EngineerContent CreatorNo ratings yet
- Dynamic Modeling and Transient Simulation VG VG VGDocument7 pagesDynamic Modeling and Transient Simulation VG VG VGFelix GamarraNo ratings yet
- RC CodesDocument12 pagesRC CodesKumar RamNo ratings yet
- Otto Robot Modular ExpansionsDocument15 pagesOtto Robot Modular ExpansionsArtem SamoylenkoNo ratings yet
- Virtual MachinesDocument6 pagesVirtual MachinesKatherine Usquisa TorrenaNo ratings yet
- Availability and Fade Margin Calculations For 5G MDocument22 pagesAvailability and Fade Margin Calculations For 5G Mili ilievNo ratings yet
- Service Manual HDI 1500Document394 pagesService Manual HDI 1500yimel60% (5)
- 2.5.5 Packet Tracer Configure Initial Switch SettingsDocument5 pages2.5.5 Packet Tracer Configure Initial Switch SettingsjamesNo ratings yet
- Lesson 13 Difference Between Broadband and Baseband TransmissionDocument3 pagesLesson 13 Difference Between Broadband and Baseband TransmissionLio OtonashiNo ratings yet