Download as ppt, pdf, or txt
You might also like
- TranscriptDocument2 pagesTranscriptstuffkibao67% (3)
- Pre-Job Safety Assessment MCGPI ISMDocument3 pagesPre-Job Safety Assessment MCGPI ISMRayyan ramosNo ratings yet
- Remote Control Programming GuideDocument47 pagesRemote Control Programming GuideArslan Saleem0% (1)
- The Nielsen Case Competition: 4 EditionDocument38 pagesThe Nielsen Case Competition: 4 EditionthanhNo ratings yet
- Solid Modeling B Rep FinalDocument68 pagesSolid Modeling B Rep Finaltimepass9580No ratings yet
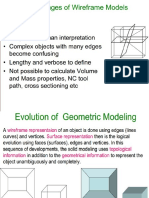
- Solid Modeling: Evolution of Geometric ModelingDocument18 pagesSolid Modeling: Evolution of Geometric ModelingVishnu SreeKumarNo ratings yet
- SolidmodelingDocument21 pagesSolidmodelingwatson123No ratings yet
- Unit III Solid ModellingDocument63 pagesUnit III Solid ModellingSuhasNo ratings yet
- 02 Solid ModelingDocument21 pages02 Solid ModelingRonak PatelNo ratings yet
- TopologyDocument45 pagesTopologyjoeNo ratings yet
- SolidsDocument70 pagesSolidskajalNo ratings yet
- Chapter 6 - DSDocument67 pagesChapter 6 - DSpruthvirajdesai204No ratings yet
- Module 9 - GraphsDocument9 pagesModule 9 - GraphsLoki LegendsNo ratings yet
- DataStructure - GraphsDocument24 pagesDataStructure - Graphsaliyaraza1No ratings yet
- Year & Sem - II & III Section - A, B, C, D Subject - Data Structures & Algorithms Unit - VDocument178 pagesYear & Sem - II & III Section - A, B, C, D Subject - Data Structures & Algorithms Unit - VKunallNo ratings yet
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuNo ratings yet
- CAD Unit - 4Document54 pagesCAD Unit - 4Ra BalamuruganNo ratings yet
- File Area Primitives: Surface TessellationDocument24 pagesFile Area Primitives: Surface TessellationNivedita kNo ratings yet
- Chapter 09Document34 pagesChapter 09khalil alhatabNo ratings yet
- CAD CAM - PresentationDocument25 pagesCAD CAM - PresentationrohanNo ratings yet
- Chapter 6.4-5 Modeling Shapes With Polygonal MeshesDocument40 pagesChapter 6.4-5 Modeling Shapes With Polygonal MeshesFranklinNo ratings yet
- Projective Geometry and TransformationsDocument37 pagesProjective Geometry and TransformationsyaswanthNo ratings yet
- Spatial Data Mining: Presented By-: Rajkumar Jain M.tech (C.s.e) 1 Year (2 Sem)Document27 pagesSpatial Data Mining: Presented By-: Rajkumar Jain M.tech (C.s.e) 1 Year (2 Sem)Johnson0% (1)
- 03 Pengenalan Open GLDocument37 pages03 Pengenalan Open GLGani DharunaNo ratings yet
- Computer Graphics UNIT-4,5Document62 pagesComputer Graphics UNIT-4,5Technical Kamal RajputNo ratings yet
- AI ch03 SearchDocument58 pagesAI ch03 Searchmusabrown0329No ratings yet
- 3d GraphicsDocument39 pages3d GraphicsShashwat MauryaNo ratings yet
- Introduction 2Document30 pagesIntroduction 2niteshNo ratings yet
- CG Lesson09 (En)Document37 pagesCG Lesson09 (En)Hoàng MinhNo ratings yet
- CS214 DS2022 Lec 13 - Graphs Part1Document71 pagesCS214 DS2022 Lec 13 - Graphs Part1azer elsaiedNo ratings yet
- DS Module 3 GRAPHDocument17 pagesDS Module 3 GRAPHKiki KarthikNo ratings yet
- CG Module 2 - Part1Document67 pagesCG Module 2 - Part1Nithin SSNo ratings yet
- Graph Theory Cambridge UDocument75 pagesGraph Theory Cambridge UgbikornoNo ratings yet
- Algorithm Lec10Document61 pagesAlgorithm Lec10Habiba HegazyNo ratings yet
- Symmetry and Group Theory - Chapter 4Document27 pagesSymmetry and Group Theory - Chapter 4Anonymous Tph9x741No ratings yet
- Geometric Primitives and TransformationsDocument35 pagesGeometric Primitives and TransformationssaranrajNo ratings yet
- Octree and BSPTREE From FoleyDocument8 pagesOctree and BSPTREE From FoleyVivekGargNo ratings yet
- Three-Dimensional Coordinate Systems: Jooned HendrarsaktiDocument30 pagesThree-Dimensional Coordinate Systems: Jooned Hendrarsaktiwaridho IskandarNo ratings yet
- Archdeacon PDFDocument67 pagesArchdeacon PDFGeorgeNo ratings yet
- Presentation On Solid ModellingDocument31 pagesPresentation On Solid ModellingdivyanshuNo ratings yet
- Lecture 01Document26 pagesLecture 01Waqar RoyNo ratings yet
- BIO/CS 471 - Algorithms For Bioinformatics: ConceptsDocument33 pagesBIO/CS 471 - Algorithms For Bioinformatics: ConceptsgjanitoNo ratings yet
- DMS-12 GraphsDocument45 pagesDMS-12 GraphsShykh IQraNo ratings yet
- Lec-14 Graph AlgorithmsDocument78 pagesLec-14 Graph AlgorithmsAlishba GondalNo ratings yet
- GraphsDocument39 pagesGraphsLavanya JNo ratings yet
- TOPIC 3 - ModellingDocument5 pagesTOPIC 3 - Modellingjonathanmaithya9No ratings yet
- Unit-5 Graph - Hashing - StudentDocument46 pagesUnit-5 Graph - Hashing - StudentManan kansaraNo ratings yet
- Computer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyDocument49 pagesComputer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyAbrahamNo ratings yet
- Computer Aided Design (Cad) : Unit - Ii Geometric ModelingDocument34 pagesComputer Aided Design (Cad) : Unit - Ii Geometric ModelingvemonNo ratings yet
- Experiment 1: To Study 2D Bravais Space Lattices Maximum Marks: 25Document3 pagesExperiment 1: To Study 2D Bravais Space Lattices Maximum Marks: 25Kevin StraceyNo ratings yet
- M M M M: Plus Homework TimeDocument4 pagesM M M M: Plus Homework Timeapi-287224366No ratings yet
- Chapter 6.1-3 Modeling Shapes With Polygonal MeshesDocument57 pagesChapter 6.1-3 Modeling Shapes With Polygonal MeshesSakirin Bin Haji MuhamedNo ratings yet
- Lab Manual 12 DSADocument20 pagesLab Manual 12 DSAinft18111035 KFUEITNo ratings yet
- UNIT-4 3D Object Representations MethodsDocument6 pagesUNIT-4 3D Object Representations MethodsRajyalakshmi MNo ratings yet
- MTH5109: Revision LecturesDocument4 pagesMTH5109: Revision LecturesJimmy LyNo ratings yet
- Graphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphDocument36 pagesGraphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphTanvir AhmedNo ratings yet
- Talk3 Tom GurDocument8 pagesTalk3 Tom GurMaira KhanNo ratings yet
- Graph Theory Soln PDFDocument10 pagesGraph Theory Soln PDFANDRE LIM BU YUN Year14No ratings yet
- Vector CalculusDocument52 pagesVector CalculusYeri KimNo ratings yet
- Computer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleyDocument52 pagesComputer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. Kelley123456ranoNo ratings yet
- J. Gross - CS E6204 Lecture 1: Computer-Graphics Models For Woven Images On SurfacesDocument32 pagesJ. Gross - CS E6204 Lecture 1: Computer-Graphics Models For Woven Images On SurfacesJemnaseeNo ratings yet
- Lecture 03Document8 pagesLecture 03MIAN AHMADNo ratings yet
- CG Mod2@AzDOCUMENTS - in PDFDocument65 pagesCG Mod2@AzDOCUMENTS - in PDFsangamesh kNo ratings yet
- Medial Axis: Exploring the Core of Computer Vision: Unveiling the Medial AxisFrom EverandMedial Axis: Exploring the Core of Computer Vision: Unveiling the Medial AxisNo ratings yet
- Can Dy/dx Be Treated As A Fraction?Document3 pagesCan Dy/dx Be Treated As A Fraction?Teresa Villena GonzálezNo ratings yet
- Chapter 07 - Printing and PlottingDocument35 pagesChapter 07 - Printing and PlottingnugrohoNo ratings yet
- Sidomuncul20190313064235169 1 PDFDocument298 pagesSidomuncul20190313064235169 1 PDFDian AnnisaNo ratings yet
- Census Literacy 2011Document40 pagesCensus Literacy 2011arpit_optimismNo ratings yet
- Life Expectancy of Males: Kimpa, Ashraf D. BSMT 1-A Biostatistics Activity # 3Document5 pagesLife Expectancy of Males: Kimpa, Ashraf D. BSMT 1-A Biostatistics Activity # 3User SmuggNo ratings yet
- Chapter 23 Microbial EcosystemsDocument21 pagesChapter 23 Microbial EcosystemsElantikaeNo ratings yet
- CD 00281302 - Calculando As GrandezasDocument24 pagesCD 00281302 - Calculando As GrandezasMarcus Zanon100% (1)
- Penguard WF BrochureDocument2 pagesPenguard WF BrochurehersonNo ratings yet
- Katana Viewer A Pi Getting Started GuideDocument30 pagesKatana Viewer A Pi Getting Started GuiderendermanuserNo ratings yet
- IGCSE Section 1 TestDocument3 pagesIGCSE Section 1 TestNanaAduNanaNo ratings yet
- Carel μRack - mRack - User manual Eng PDFDocument44 pagesCarel μRack - mRack - User manual Eng PDFAnonimo100% (1)
- Saudi Aramco Inspection Checklist: Pump Alignment Record Sheet SATR-G-2004 30-Apr-13 MechDocument4 pagesSaudi Aramco Inspection Checklist: Pump Alignment Record Sheet SATR-G-2004 30-Apr-13 MechAdvancedNo ratings yet
- Java MCQDocument51 pagesJava MCQMeera Priyaa100% (5)
- Atd2017 PressDocument6 pagesAtd2017 PressЗорица ПрокопићNo ratings yet
- ReportDocument17 pagesReportapi-309693013No ratings yet
- How To Navigate A Chaos NodeDocument4 pagesHow To Navigate A Chaos NodeKaitlyn BrabhamNo ratings yet
- Computer Communication & Networks: Network Layer: Logical AddressingDocument46 pagesComputer Communication & Networks: Network Layer: Logical AddressingAli AhmadNo ratings yet
- EWB API Dec 17Document9 pagesEWB API Dec 17nbundelNo ratings yet
- Fabry Perot Filter Analysis and Simulation Using MATLAB-Tamir SulimanDocument6 pagesFabry Perot Filter Analysis and Simulation Using MATLAB-Tamir SulimanAllamiro Tamir Bushra Suliman50% (2)
- Laravel 5 Post PDFDocument292 pagesLaravel 5 Post PDFCarlos AnchundiaNo ratings yet
- Assignment On: Principles of Operations ManagementDocument4 pagesAssignment On: Principles of Operations ManagementRoopNo ratings yet
- Ahlada Group of CompaniesDocument1 pageAhlada Group of CompaniesAhlada Group of CompaniesNo ratings yet
- HP Pro 3400 MTDocument4 pagesHP Pro 3400 MTGlinko SamaNo ratings yet
- Chem210 Syllabus (Sarah Petito)Document8 pagesChem210 Syllabus (Sarah Petito)Pratiksh PatelNo ratings yet
- Jaimini Topics 5 6 and 7 Arudhas Rashi and Graha Bala and SpecialDocument23 pagesJaimini Topics 5 6 and 7 Arudhas Rashi and Graha Bala and Specialshashidhar paiNo ratings yet
- G8 Geomtrigo Q1 M3Document19 pagesG8 Geomtrigo Q1 M3ARIEL V. ABANESNo ratings yet