Download as pptx, pdf, or txt
You might also like
- Unit 1 - ShipDocument48 pagesUnit 1 - ShipThe SinghNo ratings yet
- Compass CompensationDocument8 pagesCompass Compensationrigel100% (1)
- Unit 1 - Ships Magnetism Part 1Document13 pagesUnit 1 - Ships Magnetism Part 1The SinghNo ratings yet
- Geodynamics Lecture 2: Plate Tectonics: Observa7ons and The Role of GeodynamicsDocument48 pagesGeodynamics Lecture 2: Plate Tectonics: Observa7ons and The Role of GeodynamicsHenryRuedaNo ratings yet
- Terrestrial Navigation Data Bank OOWDocument32 pagesTerrestrial Navigation Data Bank OOWRaghad HadadNo ratings yet
- Ship Magnetism by KPKDocument3 pagesShip Magnetism by KPKFunmela Khan80% (5)
- GLS250 - Topic 3Document44 pagesGLS250 - Topic 3Mohamad Airil Imran Bin MazalanNo ratings yet
- 1.introduction To CompassesDocument33 pages1.introduction To CompassesTisha Galolo100% (2)
- Chief Mates Orals - Compass LessonDocument85 pagesChief Mates Orals - Compass LessonJeet Singh100% (1)
- Gen SUrv 1 - Compass, Magnetic DeclinationDocument24 pagesGen SUrv 1 - Compass, Magnetic DeclinationRyan Angelo LumayagNo ratings yet
- Measurement of Distance and Direction PDFDocument9 pagesMeasurement of Distance and Direction PDFShoaib hossain100% (1)
- Compass and MagnetismDocument127 pagesCompass and MagnetismReynante P. Consul60% (5)
- Compass Survey: Department of Civil Engineering NIT RourkelaDocument56 pagesCompass Survey: Department of Civil Engineering NIT Rourkelarodej54503No ratings yet
- 061 General NavigationDocument11 pages061 General NavigationMuneeb UlNo ratings yet
- Presentation W11D1 PDFDocument48 pagesPresentation W11D1 PDFMohammed SiddiqueNo ratings yet
- Structural GeologyDocument5 pagesStructural GeologySaheb BhaktaNo ratings yet
- Compass SystemsDocument14 pagesCompass SystemsAboody AL-ghamdyNo ratings yet
- MAGNETISM PresentationDocument18 pagesMAGNETISM PresentationSherry GodwinNo ratings yet
- Introduction To Petroleum Geology and GeophysicsDocument36 pagesIntroduction To Petroleum Geology and Geophysicskarthik100% (1)
- Earth's Magnetsm and CompassesDocument38 pagesEarth's Magnetsm and CompassesHannah Duyag100% (3)
- Final Exam NotesDocument24 pagesFinal Exam Notespb.69.420No ratings yet
- 1 ChartworkCompassDocument35 pages1 ChartworkCompassRamanan Manimozhi100% (1)
- Magnetic Compass-2Document17 pagesMagnetic Compass-2Parminder singh parmarNo ratings yet
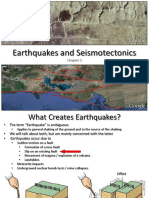
- 5 Earthquakes & Seismotectonics PDFDocument42 pages5 Earthquakes & Seismotectonics PDFDr. Khan MuhammadNo ratings yet
- Plate Tectonics: Evidence Theory Types of Plate BoundariesDocument47 pagesPlate Tectonics: Evidence Theory Types of Plate BoundariesStephen CubarNo ratings yet
- SS7 Sigma1Document46 pagesSS7 Sigma1chandranNo ratings yet
- 1 Solid Earth - Plate TectonisDocument18 pages1 Solid Earth - Plate TectonisIBA UPNNo ratings yet
- 2 - Compass NotesDocument30 pages2 - Compass NotesAeshwarya AgrawalNo ratings yet
- Turning in CirclesDocument31 pagesTurning in CirclesdevmarineacademyNo ratings yet
- UNIT II - Syllabus: Compass and Plane Table SurveyingDocument51 pagesUNIT II - Syllabus: Compass and Plane Table SurveyingVignesh VitsmeonNo ratings yet
- Theory of Earth's Magnetism and It's Relation ToDocument15 pagesTheory of Earth's Magnetism and It's Relation ToMaster Irvin100% (1)
- MagnetismDocument62 pagesMagnetismqbsvntbdzshcckzwojNo ratings yet
- Theory of Earth S Magnetism and It S Relation ToDocument15 pagesTheory of Earth S Magnetism and It S Relation ToMark Sherwin AngNo ratings yet
- Magnetic Compass AdjustmentDocument18 pagesMagnetic Compass AdjustmentMili VermaNo ratings yet
- POWER Nav1 - MIDTERM - Topic 1 & 2Document31 pagesPOWER Nav1 - MIDTERM - Topic 1 & 2CLIJOHN PABLO FORD100% (1)
- Special Class TestDocument73 pagesSpecial Class TestSatyam YadavNo ratings yet
- Navigation IDocument29 pagesNavigation Imohamed100% (1)
- Magnetic and Gyro CompassDocument34 pagesMagnetic and Gyro CompassGlenbert SabenorioNo ratings yet
- HSN-STR-1-Rel Michelson-MorleyDocument6 pagesHSN-STR-1-Rel Michelson-MorleysahanakapparadNo ratings yet
- Magnetic Compass Notes-1Document10 pagesMagnetic Compass Notes-1loai allamNo ratings yet
- KO Magnetism On PHYDocument37 pagesKO Magnetism On PHYolatejuinioluwa9No ratings yet
- 04-05 Pertemuan IV - Seismologi PDFDocument60 pages04-05 Pertemuan IV - Seismologi PDFI2OI5OOI8Cintya Agnessa SitorusNo ratings yet
- Evidence For Plate Tectonics From Magnetics: William WilcockDocument31 pagesEvidence For Plate Tectonics From Magnetics: William Wilcockmokhamad rizkiNo ratings yet
- Paleo MagnetismDocument25 pagesPaleo MagnetismM Deki Agung SaputraNo ratings yet
- 224 C1 Basic Principles of Seismology: C1.1 General Introduction To Wave PhenomenaDocument34 pages224 C1 Basic Principles of Seismology: C1.1 General Introduction To Wave PhenomenaKoushik BiswasNo ratings yet
- 224 C1 Basic Principles of Seismology: C1.1 General Introduction To Wave PhenomenaDocument26 pages224 C1 Basic Principles of Seismology: C1.1 General Introduction To Wave PhenomenaDiego CastilloNo ratings yet
- Physics Hard MCQs Topic WiseDocument38 pagesPhysics Hard MCQs Topic WiseAttique RehmanNo ratings yet
- Learning ObjectivesDocument41 pagesLearning ObjectivesPandu Samudra P SNo ratings yet
- Basic Natural Sciences - TectonicsDocument47 pagesBasic Natural Sciences - TectonicsNur Aeni MusyafakNo ratings yet
- NavigationDocument31 pagesNavigationjoshigauta75% (4)
- R.M Mtii SGDocument1 pageR.M Mtii SGRonnie MillerNo ratings yet
- Introduction Ship Design EngineeringDocument69 pagesIntroduction Ship Design EngineeringUNsha bee komNo ratings yet
- (Ship Hydro-Statics & Dynamics) Floatation & StabilityDocument59 pages(Ship Hydro-Statics & Dynamics) Floatation & StabilityVisnu DrxsNo ratings yet
- Magnetic Compass: Pacis, Franc O. BSMT 1A17Document13 pagesMagnetic Compass: Pacis, Franc O. BSMT 1A17Lily AtisNo ratings yet
- Tidal AnalysisDocument60 pagesTidal AnalysisCaio Barbosa100% (1)
- Activity 7Document2 pagesActivity 7Cardo LunaNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Atlas of Structural Geological Interpretation from Seismic ImagesFrom EverandAtlas of Structural Geological Interpretation from Seismic ImagesAchyuta Ayan MisraNo ratings yet