Download as ppt, pdf, or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Special Power of Attorney NSO FormatDocument1 pageSpecial Power of Attorney NSO FormatAntoniette Maria Lucero60% (5)
- Cooling System DeareationDocument27 pagesCooling System DeareationNarendra Joseph Kumar100% (3)
- c5198 Transistor DatasheetDocument3 pagesc5198 Transistor DatasheetFrancisco AntonioNo ratings yet
- Micom P63X Transf. Differential Protection: April 2002Document72 pagesMicom P63X Transf. Differential Protection: April 2002Quang Nguyen100% (1)
- LCP02-150B1: Protection Ic For Ringing SlicsDocument8 pagesLCP02-150B1: Protection Ic For Ringing Slicsseyed mohammadNo ratings yet
- catalog-L6E3 DatasheetDocument3 pagescatalog-L6E3 Datasheetgabriel martinsNo ratings yet
- Photointerrupter: Product Data SheetDocument6 pagesPhotointerrupter: Product Data SheettadilakshmikiranNo ratings yet
- MF1-EL (Earth Leakage Protection)Document4 pagesMF1-EL (Earth Leakage Protection)VirgilioNo ratings yet
- Air Circuit Breakers: CG International DivisionDocument9 pagesAir Circuit Breakers: CG International DivisionHari Krishna.M100% (2)
- Pol955 60Document12 pagesPol955 60AssaadNo ratings yet
- Micrologic 2.2 / 2.3-AB: Ratings (A) in at 40°C 100 160 240 400Document1 pageMicrologic 2.2 / 2.3-AB: Ratings (A) in at 40°C 100 160 240 400Slobodan SavicNo ratings yet
- Generator ProtectionDocument69 pagesGenerator ProtectionkarthikNo ratings yet
- Shocking Electricity: Presented By: Mick Maytum ICT Protection Expert Ictsp-Essays - InfoDocument12 pagesShocking Electricity: Presented By: Mick Maytum ICT Protection Expert Ictsp-Essays - Infosameer_msbNo ratings yet
- Lite-On Technology Corporation: FeaturesDocument13 pagesLite-On Technology Corporation: FeaturesamitNo ratings yet
- Evolution of Drives: ABB Industry OyDocument16 pagesEvolution of Drives: ABB Industry OyPuneet JoshiNo ratings yet
- Continental Device India Limited: NPN Silicon Epitaxial Power Transistors C44C8, C44C11 TO - 220 Plastic PackageDocument3 pagesContinental Device India Limited: NPN Silicon Epitaxial Power Transistors C44C8, C44C11 TO - 220 Plastic Packagefelipe ledezmaNo ratings yet
- Sunny Tripower 8000-17000TL DatasheetDocument2 pagesSunny Tripower 8000-17000TL DatasheetnabilNo ratings yet
- Type BM11 Load Cell: Short DescriptionDocument4 pagesType BM11 Load Cell: Short DescriptionAris Rahman HidayatNo ratings yet
- ESC Series Data SheetDocument11 pagesESC Series Data SheetDeathKXNo ratings yet
- EP C TT1 1 TT 275 05.04.07en 01Document2 pagesEP C TT1 1 TT 275 05.04.07en 01neonapcanNo ratings yet
- BM11 DatasheetDocument4 pagesBM11 DatasheetTakaSenseiNo ratings yet
- Type B8D Load Cell: Short DescriptionDocument4 pagesType B8D Load Cell: Short DescriptionLe TruongNo ratings yet
- H8C DatasheetDocument5 pagesH8C DatasheethendryrenantoNo ratings yet
- H8C DatasheetDocument5 pagesH8C DatasheetSuprapto ToNo ratings yet
- Datasheet A1941 Y C5198Document3 pagesDatasheet A1941 Y C5198Samuel RivasNo ratings yet
- Unisonic Technologies Co., LTD: Low Voltage High Current Small Signal NPN TransistorDocument4 pagesUnisonic Technologies Co., LTD: Low Voltage High Current Small Signal NPN TransistorSalah Al-AbsiNo ratings yet
- Singapore DTL Signalling by Joana Lee (Siemens Pte LTD) 18th Nov 2016Document23 pagesSingapore DTL Signalling by Joana Lee (Siemens Pte LTD) 18th Nov 2016Rizky Harry SungguhNo ratings yet
- Sunos06973 1Document4 pagesSunos06973 1pedro castroNo ratings yet
- SIP5 7UT82-85-86-87 V07.00 Manual C016-6 En2Document3 pagesSIP5 7UT82-85-86-87 V07.00 Manual C016-6 En2DharmenderSinghChoudharyNo ratings yet
- Type BM11 Load Cell: Short DescriptionDocument4 pagesType BM11 Load Cell: Short DescriptionАлександр КолосовNo ratings yet
- Intro PT 1 ENDocument26 pagesIntro PT 1 ENAngela TienNo ratings yet
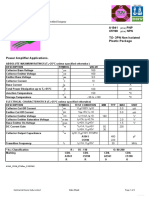
- Continental Device India Limited: Power Transistors A1941 PNP C5198 NPN TO-3PN Non Isolated Plastic PackageDocument3 pagesContinental Device India Limited: Power Transistors A1941 PNP C5198 NPN TO-3PN Non Isolated Plastic PackageyesicaNo ratings yet
- L6D15 DatasheetDocument3 pagesL6D15 DatasheetMuthukumar RadhakrishnanNo ratings yet
- Steps of Transportation and AssignmentDocument16 pagesSteps of Transportation and AssignmentSubir ChakrabartyNo ratings yet
- Test ReportDocument2 pagesTest ReportMupparaju NagarajuNo ratings yet
- H209 01 PolaroidDocument7 pagesH209 01 PolaroidmaurilioctbaNo ratings yet
- Presentation P631+P632+P633+P634Document59 pagesPresentation P631+P632+P633+P634Leister Carneiro TheodoroNo ratings yet
- BF257,258,259Document6 pagesBF257,258,259bookreader1968No ratings yet
- Karta Katalogowa Inwerter 15kWDocument2 pagesKarta Katalogowa Inwerter 15kWPaweł KiersztynNo ratings yet
- (C) FP-AI-100 Operating Instructions (370278A)Document16 pages(C) FP-AI-100 Operating Instructions (370278A)BoyzannazNo ratings yet
- LTV-357T Series-TransistorDocument12 pagesLTV-357T Series-TransistorJulian Andres SierraNo ratings yet
- Cables CalculationsDocument10 pagesCables Calculationsmina.manoulyNo ratings yet
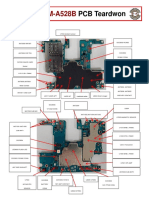
- SM-A528B Galaxy A52s 5GDocument2 pagesSM-A528B Galaxy A52s 5Gpartha khatuaNo ratings yet
- Filter Manual: Vacon Cx/Cxl/Cxs Frequency ConvertersDocument13 pagesFilter Manual: Vacon Cx/Cxl/Cxs Frequency ConvertersnabeelNo ratings yet
- Spare ConnectorsDocument12 pagesSpare ConnectorsRafael Silverio LaurelliNo ratings yet
- M20 Datasheet 01-5959-01r0 ENDocument8 pagesM20 Datasheet 01-5959-01r0 ENTudorache IulianNo ratings yet
- Lite-On Technology Corporation: FeaturesDocument6 pagesLite-On Technology Corporation: FeaturesThomas ThomasNo ratings yet
- IRI-Pro-V2: C&S Electric LimitedDocument8 pagesIRI-Pro-V2: C&S Electric LimitedVishal ShahNo ratings yet
- Type HM9B Load Cell: Short DescriptionDocument3 pagesType HM9B Load Cell: Short DescriptionGoh Boon TiongNo ratings yet
- MMBTA06Document5 pagesMMBTA06rodrigo2016.cdNo ratings yet
- Type L6E Load Cell: Short DescriptionDocument3 pagesType L6E Load Cell: Short Descriptionberok maniaNo ratings yet
- 1PTB13 (As Per AC Loadings)Document29 pages1PTB13 (As Per AC Loadings)jasekanNo ratings yet
- DiadramsDocument2 pagesDiadramsJohn fredy cuervoNo ratings yet
- Service Bulletin: Issued by Canon Europa N.VDocument3 pagesService Bulletin: Issued by Canon Europa N.VokeinfoNo ratings yet
- CMC 356 Presentation ENUDocument14 pagesCMC 356 Presentation ENUAri100% (1)
- Type L6N Load Cell: Short DescriptionDocument3 pagesType L6N Load Cell: Short DescriptionAde AdeNo ratings yet
- The Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsFrom EverandThe Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsSylvain ClercNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- DB 214Document25 pagesDB 214Muhammad SoomarNo ratings yet
- EN P543-5 - Protection Function - Rev - BDocument68 pagesEN P543-5 - Protection Function - Rev - BMuhammad SoomarNo ratings yet
- MiCOM P543Document77 pagesMiCOM P543Muhammad SoomarNo ratings yet
- 14 To 17Document97 pages14 To 17Muhammad SoomarNo ratings yet
- Distance Protn SchemesDocument37 pagesDistance Protn SchemesMuhammad SoomarNo ratings yet
- DISTPROTNSTUDYREPORTDocument59 pagesDISTPROTNSTUDYREPORTMuhammad SoomarNo ratings yet
- Chemistry ProjectDocument11 pagesChemistry ProjectShahenshah pal SinghNo ratings yet
- Chemical Reaction Engineering - II - R2015 - 15-05-2019Document2 pagesChemical Reaction Engineering - II - R2015 - 15-05-201918135A0806 MAKKUVA BHAVYANo ratings yet
- DigestionDocument3 pagesDigestionmuneeza dueveshNo ratings yet
- Description of HospitalDocument1 pageDescription of HospitalDanica Joy V. JacobaNo ratings yet
- 07b.external ConvectionDocument12 pages07b.external ConvectionAbu YusufNo ratings yet
- Medication Card HeparinDocument2 pagesMedication Card HeparinEllieNo ratings yet
- Annual Review of Selected Scientific Literature 1Document36 pagesAnnual Review of Selected Scientific Literature 1abdulrar100% (1)
- Section 1 General Specification Acmv Installation General Requirements of Mechanical & Electrical Works 1.1 GeneralDocument40 pagesSection 1 General Specification Acmv Installation General Requirements of Mechanical & Electrical Works 1.1 GeneralThean Hai XuNo ratings yet
- OrmaxDocument26 pagesOrmaxNandini GoyalNo ratings yet
- Fcde 0110uk PDFDocument580 pagesFcde 0110uk PDFbtsgr parkerNo ratings yet
- Jurnal Trilac (Triamcinolone)Document7 pagesJurnal Trilac (Triamcinolone)Muhammad IqbalNo ratings yet
- Miasms and Nosodes Volume I Louis Klein.04531 1Document22 pagesMiasms and Nosodes Volume I Louis Klein.04531 1Velu SubramanianNo ratings yet
- The Chronopolitics of The Anthropocene: The Pandemic and Our Sense of TimeDocument25 pagesThe Chronopolitics of The Anthropocene: The Pandemic and Our Sense of TimeJoão Francisco PinhoNo ratings yet
- All The Damn Vampires - Stacey Lawless PDFDocument13 pagesAll The Damn Vampires - Stacey Lawless PDFMark DingleNo ratings yet
- Design, Modelling & Analysis of High Energy Safety Impact Guard For Heavy Duty VehicleDocument10 pagesDesign, Modelling & Analysis of High Energy Safety Impact Guard For Heavy Duty VehicleIJRASETPublicationsNo ratings yet
- Hygiene Environmental HealthDocument4 pagesHygiene Environmental HealthCpopNo ratings yet
- In Biosimilar Guidelines - Feb 17, 2014Document28 pagesIn Biosimilar Guidelines - Feb 17, 2014Aparna ShejwalkarNo ratings yet
- Outline PDF 06052024Document14 pagesOutline PDF 06052024Ryu SenaNo ratings yet
- 2014 Hubsch Z Et Al.Document13 pages2014 Hubsch Z Et Al.vishdubey777No ratings yet
- Innes 1957Document2 pagesInnes 1957Magesh kumarNo ratings yet
- Atlas Группа Izohan Каталог Продуктов Битумные МассыDocument12 pagesAtlas Группа Izohan Каталог Продуктов Битумные Массыtoms4No ratings yet
- Protein Bar ReportDocument89 pagesProtein Bar ReportJoão PedroNo ratings yet
- Pr2 Final CookieDocument18 pagesPr2 Final CookieRed VailNo ratings yet
- Csi 23-0510 - Square Meter Construction LLC Plot No-9132693Document1 pageCsi 23-0510 - Square Meter Construction LLC Plot No-9132693Muhammad AfrasiyabNo ratings yet
- Upload Paper For OpapersDocument31 pagesUpload Paper For OpapersMuhamad Eddin SyazriNo ratings yet
- BW211-212-213D-PD-40-Operating Maintenance InstructionsDocument122 pagesBW211-212-213D-PD-40-Operating Maintenance InstructionsRudi Abu ZahraNo ratings yet
- DR Pugud - Correlation Between CHD and DiabetesDocument47 pagesDR Pugud - Correlation Between CHD and DiabetesKrishnaNo ratings yet
- TROLEX TX6114 Installation Operating DataDocument7 pagesTROLEX TX6114 Installation Operating DataprafulNo ratings yet