Download as pptx, pdf, or txt
You might also like
- StorageTek High-End Tape Libraries Field Delivery Support Consultant - Online AssessmentDocument56 pagesStorageTek High-End Tape Libraries Field Delivery Support Consultant - Online AssessmentDami100% (1)
- DSP1 - Practice Homework With SolutionsDocument9 pagesDSP1 - Practice Homework With Solutionsdania alamenNo ratings yet
- 1tgc910609m0201 Mns Is Quick Guide v5.4Document62 pages1tgc910609m0201 Mns Is Quick Guide v5.4wasim100% (1)
- Topic 2: Time Domain: ELEN E4810: Digital Signal ProcessingDocument60 pagesTopic 2: Time Domain: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- EE120notesFa15 PDFDocument143 pagesEE120notesFa15 PDFnaibaf naibafNo ratings yet
- Chapter 2Document70 pagesChapter 2Trần QuangNo ratings yet
- Chapter2 PDFDocument69 pagesChapter2 PDFHương HươngNo ratings yet
- Exercise 1: ECE 413 - Digital Signal Processing Home Assignment 1 SolutionsDocument8 pagesExercise 1: ECE 413 - Digital Signal Processing Home Assignment 1 SolutionsA NNo ratings yet
- Homework 2: 1.1. InstructionsDocument13 pagesHomework 2: 1.1. InstructionsAndres GarciaNo ratings yet
- Chapter 7 Discrete Time SignalDocument19 pagesChapter 7 Discrete Time SignalumarNo ratings yet
- CSE - 610 Lecture # 2Document46 pagesCSE - 610 Lecture # 2zaidNo ratings yet
- Lec 8Document59 pagesLec 8Saif AlabdullahNo ratings yet
- Sheet 1Document2 pagesSheet 1Habibat El Rahman AshrafNo ratings yet
- 2-LTI Discrete Time SystemsDocument22 pages2-LTI Discrete Time SystemsBomber KillerNo ratings yet
- Lec7 10Document43 pagesLec7 10ekmemonNo ratings yet
- L4 1 LTIsys AnalysisDocument11 pagesL4 1 LTIsys AnalysisMohd Shadab AlamNo ratings yet
- 6.003: Signals and Systems: Z TransformDocument51 pages6.003: Signals and Systems: Z TransformM Arif KhabibullohNo ratings yet
- Lecture 13 - Impulse Reponse and FIR Filter (Slides)Document16 pagesLecture 13 - Impulse Reponse and FIR Filter (Slides)Buddhadev GhoshNo ratings yet
- Digital Signal Processing: Solved HW For Day 7Document21 pagesDigital Signal Processing: Solved HW For Day 7Cuau SuarezNo ratings yet
- Lecture 4Document58 pagesLecture 4Ali QureshiNo ratings yet
- HW 2Document3 pagesHW 2Kim Quy TrầnNo ratings yet
- DSP Lect L1Document15 pagesDSP Lect L1abebebelachewmekonnenNo ratings yet
- EE322M Quiz-1 SolutionDocument6 pagesEE322M Quiz-1 SolutionshubhamNo ratings yet
- Two Examples On Linear and Circular Convolution of Signals.: Example 1Document2 pagesTwo Examples On Linear and Circular Convolution of Signals.: Example 1Bharath RamNo ratings yet
- EEO 401 Note Set 20Document10 pagesEEO 401 Note Set 20The great PNo ratings yet
- Multi-Rate Digital Signal ProcessingDocument38 pagesMulti-Rate Digital Signal Processinganon_326727214No ratings yet
- Digital Signal Processing - Week5 Quiz Solutions: June 15, 2018Document6 pagesDigital Signal Processing - Week5 Quiz Solutions: June 15, 2018bita younesianNo ratings yet
- Hw3 SolutionsDocument17 pagesHw3 SolutionsSneha AdhikariNo ratings yet
- Sistem Waktu Diskrit: Deskripsi Input-Output Representasi Diagram Blok Klasifikasi Sistem Hubungan Antar SistemDocument34 pagesSistem Waktu Diskrit: Deskripsi Input-Output Representasi Diagram Blok Klasifikasi Sistem Hubungan Antar SistemDifa Agfi Desebrio SyahNo ratings yet
- Problem Set 1Document3 pagesProblem Set 1tamim hakimNo ratings yet
- Operation On Discrete-Time Signals & Discrete-Time System: Lecture - 3Document36 pagesOperation On Discrete-Time Signals & Discrete-Time System: Lecture - 3Himanshu sharmaNo ratings yet
- Ho08 Ps3 SolDocument4 pagesHo08 Ps3 SolWassim OweiniNo ratings yet
- Signal and System HW1 - SolutionDocument6 pagesSignal and System HW1 - Solutioneccyu97No ratings yet
- SBE I - Biomedical Data Science (580.421/721) : Ren e Vidal September 7, 2018Document4 pagesSBE I - Biomedical Data Science (580.421/721) : Ren e Vidal September 7, 2018DavidNo ratings yet
- Chap8 (Ztransform)Document11 pagesChap8 (Ztransform)김민성No ratings yet
- Signals & Systems - Chapter 2: K N X K HDocument13 pagesSignals & Systems - Chapter 2: K N X K HBadawath NareshNo ratings yet
- Chapter 2 Discrete-Time Signals and Systems: IntroductionDocument21 pagesChapter 2 Discrete-Time Signals and Systems: IntroductionYiwen HsiNo ratings yet
- Sol FinalDocument9 pagesSol FinalLisagouldNo ratings yet
- EE5130: Digital Signal ProcessingDocument2 pagesEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540No ratings yet
- DSP Lect L2Document29 pagesDSP Lect L2abebebelachewmekonnenNo ratings yet
- ps7 SolDocument8 pagesps7 SolBRIGITTE BERNAL BELISARIONo ratings yet
- Chapter 1 Signals and Systems-Dr. ShantaDocument72 pagesChapter 1 Signals and Systems-Dr. Shantablaze emberNo ratings yet
- EE605 Department of Electrical Engineering Exercise Set-7 2019-20-IDocument4 pagesEE605 Department of Electrical Engineering Exercise Set-7 2019-20-IRahz SinghNo ratings yet
- Chapter I Lin Sys II Part IIDocument22 pagesChapter I Lin Sys II Part IIMohamed Ouail CHARAOUINo ratings yet
- DSP1 - Practice HomeworkDocument3 pagesDSP1 - Practice Homeworkdania alamenNo ratings yet
- Lab 1Document8 pagesLab 1yohanNo ratings yet
- Power SeriesDocument8 pagesPower SeriescOrekernNo ratings yet
- ECE 4270 HW1 SolutionDocument3 pagesECE 4270 HW1 SolutionTanmayBangaloreNo ratings yet
- Assignment 1Document2 pagesAssignment 1Farhan KhalilNo ratings yet
- Lege. FunctionsDocument10 pagesLege. Functionsfaizan bariNo ratings yet
- Course 18.327 and 1.130 Wavelets and Filter BanksDocument8 pagesCourse 18.327 and 1.130 Wavelets and Filter BankstriasamNo ratings yet
- 6.003: Signals and SystemsDocument72 pages6.003: Signals and SystemsAmandeep SinghNo ratings yet
- Final Exam 2009Document9 pagesFinal Exam 2009MayamakbariNo ratings yet
- Multi Rate DSPDocument41 pagesMulti Rate DSPSairam SairamNo ratings yet
- Filtering and ConvolutionsDocument15 pagesFiltering and ConvolutionssoumikbhNo ratings yet
- For Upload DSP2 Ch5Document37 pagesFor Upload DSP2 Ch5Mohamed Hasan MutarNo ratings yet
- Expt 01 DSP LabDocument12 pagesExpt 01 DSP Labproddut ChakrabortyNo ratings yet
- Lecture 6 Convolution Using DFTDocument38 pagesLecture 6 Convolution Using DFTAman SharmaNo ratings yet
- ECE 301: Signals and Systems Homework Assignment #3: Professor: Aly El Gamal TA: Xianglun MaoDocument9 pagesECE 301: Signals and Systems Homework Assignment #3: Professor: Aly El Gamal TA: Xianglun Maolakshitha srimalNo ratings yet
- Z TransformDocument23 pagesZ TransformHina ShakirNo ratings yet
- Factoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)From EverandFactoring and Algebra - A Selection of Classic Mathematical Articles Containing Examples and Exercises on the Subject of Algebra (Mathematics Series)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- FND Lookup Values APIDocument3 pagesFND Lookup Values APImrabdulbaqiNo ratings yet
- World Bank CV FormatDocument7 pagesWorld Bank CV FormatTanveer AzizNo ratings yet
- Amc 1117Document9 pagesAmc 1117Hoang LeNo ratings yet
- 2023 Data Center TrendsDocument50 pages2023 Data Center TrendsNalendra Wibowo100% (1)
- GPON Vs EPONDocument3 pagesGPON Vs EPONDANIEL LEADNo ratings yet
- Local Configuration of 4G ENodeB Using USB Memory Stick - V0.1Document24 pagesLocal Configuration of 4G ENodeB Using USB Memory Stick - V0.1Richard AlisangcoNo ratings yet
- E CATTDocument62 pagesE CATTVikas SahoreNo ratings yet
- Pointers in The C Programming L - Ninnat Aupala-1Document110 pagesPointers in The C Programming L - Ninnat Aupala-1tasmanNo ratings yet
- Viptela Control Plane Setup PDFDocument29 pagesViptela Control Plane Setup PDFFederacion Hip Hop DominicanaNo ratings yet
- Difference Between D-MOSFET and E-MOSFETDocument25 pagesDifference Between D-MOSFET and E-MOSFETgezahegnNo ratings yet
- VCU-EV2274A Datasheet V2.3Document29 pagesVCU-EV2274A Datasheet V2.3David DjNo ratings yet
- Product Assistance For SAP Yard Logistics For SAP S/4Hana: Operations InformationDocument12 pagesProduct Assistance For SAP Yard Logistics For SAP S/4Hana: Operations InformationnavinNo ratings yet
- Designing A Secure Network Josh Roberts Copy 13Document14 pagesDesigning A Secure Network Josh Roberts Copy 13HugsNo ratings yet
- Microsoft Cybersecurity Reference Architectures (MCRA)Document47 pagesMicrosoft Cybersecurity Reference Architectures (MCRA)Martin Ojeda KnappNo ratings yet
- Mi Paper 3Document2 pagesMi Paper 3Jay ThakarNo ratings yet
- PCIe Gen5 TX Tech Brief 090221Document12 pagesPCIe Gen5 TX Tech Brief 090221Sasikala KesavaNo ratings yet
- Question OnlineDocument28 pagesQuestion OnlineThennali RamanNo ratings yet
- RN CC v2 90 SP5 A163819WAJ ADocument22 pagesRN CC v2 90 SP5 A163819WAJ AJhonny SarmientoNo ratings yet
- Usb DevsDocument963 pagesUsb DevsBlock FarmerNo ratings yet
- CompTIA Network+ N10 007 Practice Exam Questions 2020 Fully UpdatedDocument180 pagesCompTIA Network+ N10 007 Practice Exam Questions 2020 Fully Updatednya marcelNo ratings yet
- Auto Mobile Service StationDocument28 pagesAuto Mobile Service Stationwelcome to GIRIVAR world100% (4)
- 2268 DataSheetDocument6 pages2268 DataSheetisrarhussain588No ratings yet
- MC80F0704/0708 MC80F0804/0808: User's ManualDocument120 pagesMC80F0704/0708 MC80F0804/0808: User's ManualBasselal AlNo ratings yet
- The OpenAirInterface 5G New Radio Implementation - Current Status and RoadmapDocument5 pagesThe OpenAirInterface 5G New Radio Implementation - Current Status and RoadmapBipin JaiswalNo ratings yet
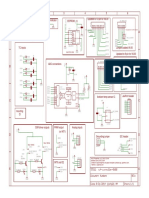
- Arduino UNO Tc4-ControllerDocument1 pageArduino UNO Tc4-ControllerJuan CastroNo ratings yet
- Education Qualification: Electrical Engineer Electrical EngineerDocument2 pagesEducation Qualification: Electrical Engineer Electrical EngineerVipin vermaNo ratings yet
- FLS BOISE MD070 Order Acknowledgement 1.1Document27 pagesFLS BOISE MD070 Order Acknowledgement 1.1Satish Kumar SinghNo ratings yet
- Ups Apc 10kvaDocument8 pagesUps Apc 10kvapablomejia37No ratings yet