Download as pptx, pdf, or txt
You might also like
- E01 33kV and 11 KV Lightning Arresters (1) - 2010Document12 pagesE01 33kV and 11 KV Lightning Arresters (1) - 2010Ashwin RaparthiNo ratings yet
- Short-Circuit AnalysisDocument88 pagesShort-Circuit AnalysisAbhijeet Kumar SinghNo ratings yet
- CORONA With Peek S Law PDFDocument127 pagesCORONA With Peek S Law PDFEmilio ClavelNo ratings yet
- P139 EN M A88 Vol1Document736 pagesP139 EN M A88 Vol1Cristina AntohiNo ratings yet
- 7SSx AP110 CT Req ExplanationDocument9 pages7SSx AP110 CT Req Explanationpepaboh820No ratings yet
- Transient OvervoltageDocument11 pagesTransient OvervoltageLucio Loyloy SanchezNo ratings yet
- Data For The IEEE 118 Bus Power System: Appendix DDocument8 pagesData For The IEEE 118 Bus Power System: Appendix DVenkatesh PeruthambiNo ratings yet
- Nuclear Power Corporation of India LTDDocument35 pagesNuclear Power Corporation of India LTDsanthosh100% (1)
- Motor StartingDocument1 pageMotor StartingMoazam AliNo ratings yet
- Date Project: 230/110Kv Karuppur Substation Document NoDocument1 pageDate Project: 230/110Kv Karuppur Substation Document NosparkCENo ratings yet
- Load Flow Analysis: ETAP Workshop Notes © 1996-2009 Operation Technology, IncDocument75 pagesLoad Flow Analysis: ETAP Workshop Notes © 1996-2009 Operation Technology, Incjohan0818No ratings yet
- Busbar Sizing CalculationDocument6 pagesBusbar Sizing CalculationmaninderpreetNo ratings yet
- Fault Level One PointDocument19 pagesFault Level One Pointkapil100% (1)
- Technical Specification For Composite Line Post Insulators: Ergon Energy Corporation LimitedDocument25 pagesTechnical Specification For Composite Line Post Insulators: Ergon Energy Corporation LimitedardiwilagagunNo ratings yet
- Power System 2Document103 pagesPower System 2msathish_eeeNo ratings yet
- Model SS ChecklistDocument30 pagesModel SS ChecklistAnonymous PeuxGWWy8tNo ratings yet
- Annexture-A: Project Name:-132/33KV, 2X30 MVA Switchyard, Kolkatta, West Bengal Document IndexDocument5 pagesAnnexture-A: Project Name:-132/33KV, 2X30 MVA Switchyard, Kolkatta, West Bengal Document Indexask.kulkarni KulkarniNo ratings yet
- PROJECT: Main Switchboard No.1 Calculation of Required Capacitor PowerDocument2 pagesPROJECT: Main Switchboard No.1 Calculation of Required Capacitor PowerPrasadNo ratings yet
- Application Guide: General PointsDocument71 pagesApplication Guide: General PointsWaseem MohammedNo ratings yet
- PS5111-Power System Simulation Lab-IDocument97 pagesPS5111-Power System Simulation Lab-ILakshmi Zahara67% (3)
- 3ph Isc at LV InstallationDocument7 pages3ph Isc at LV InstallationbambangNo ratings yet
- Locked Rotor Code Letters and Reduced Voltage Starting MethodsDocument3 pagesLocked Rotor Code Letters and Reduced Voltage Starting MethodsBobot PadilloNo ratings yet
- How To Solve Short Circuit Calculation Using Point To Point Method PDFDocument6 pagesHow To Solve Short Circuit Calculation Using Point To Point Method PDFMenaNo ratings yet
- ETAP An OverviewDocument69 pagesETAP An OverviewVasudevan Kunjithapatham100% (1)
- H LV Switch Gear Functions and SelectionDocument28 pagesH LV Switch Gear Functions and SelectionRavindar ArumugamNo ratings yet
- EKS-0069 Rev 0 132 KV and 150 KV Underground AC Cable SystemsDocument7 pagesEKS-0069 Rev 0 132 KV and 150 KV Underground AC Cable SystemssurenmeNo ratings yet
- Aa 02 Short-Circuit Iec StandardDocument58 pagesAa 02 Short-Circuit Iec StandardSupriyanto SuhonoNo ratings yet
- ACP Revit MEP Electrical Exam Objectives PDFDocument1 pageACP Revit MEP Electrical Exam Objectives PDFPavan Kumar AJNo ratings yet
- Miniature Circuit Breaker-DetailsDocument7 pagesMiniature Circuit Breaker-Detailssrabon1059No ratings yet
- ARC Flash Boundary: Approach / Protection BoundariesDocument5 pagesARC Flash Boundary: Approach / Protection BoundariesAhmed MostafaNo ratings yet
- 1 - 2 Voltage Drop Calculations MATHCADDocument9 pages1 - 2 Voltage Drop Calculations MATHCADrian0201No ratings yet
- Calculate Size of ContactorDocument3 pagesCalculate Size of ContactordhruvNo ratings yet
- 3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideDocument5 pages3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation Guidesiddiq shahNo ratings yet
- LOAD LIST House - UDHDocument8 pagesLOAD LIST House - UDHAsif SajwaniNo ratings yet
- Total Losses in Power Distribution and Transmission Lines 1Document6 pagesTotal Losses in Power Distribution and Transmission Lines 1Muahmmad ShahzadNo ratings yet
- Trip Settings NSX TMD Circuit BreakerDocument1 pageTrip Settings NSX TMD Circuit BreakerMekaNo1DNo ratings yet
- Impact of AVR On StabilityDocument44 pagesImpact of AVR On StabilityMamta MrjnNo ratings yet
- Surge Impedance & Surge Impedance Loading: Compiled By, Prof Shivam Shrivastava Ap-Ee, ItnuDocument8 pagesSurge Impedance & Surge Impedance Loading: Compiled By, Prof Shivam Shrivastava Ap-Ee, ItnuShivam ShrivastavaNo ratings yet
- Motor Starting Dynamic AccelerationDocument63 pagesMotor Starting Dynamic Accelerationashraf-84No ratings yet
- Transient Stability Analysis of Power SystemDocument11 pagesTransient Stability Analysis of Power SystemSunil Rai100% (2)
- Attachment 11.2 LFDocument5,716 pagesAttachment 11.2 LFGeetha BirudalaNo ratings yet
- Power Cable Schedule and Sizing CalculationDocument3 pagesPower Cable Schedule and Sizing Calculationankit singla100% (1)
- Lecture Note: Insulation CoordinationDocument8 pagesLecture Note: Insulation CoordinationMehmet Efe OzbekNo ratings yet
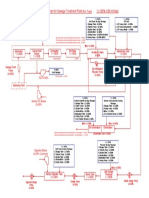
- Schematic Diagram For Sewage Treatment Plant 2 x100% (180 M /day)Document1 pageSchematic Diagram For Sewage Treatment Plant 2 x100% (180 M /day)siva242245No ratings yet
- Infeed EffectDocument1 pageInfeed EffectZokiNo ratings yet
- Section 5 Power Flow PDFDocument128 pagesSection 5 Power Flow PDFRanjan GandhiNo ratings yet
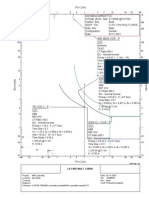
- LV 3 PH Fault CurveDocument1 pageLV 3 PH Fault Curveyadav_sctNo ratings yet
- Shunt Compensation - 1Document75 pagesShunt Compensation - 1Jayarajan Jayarajan C NNo ratings yet
- Line Differential Protection and Control Red615 Ansi: Application ManualDocument120 pagesLine Differential Protection and Control Red615 Ansi: Application ManualMir MuhammadNo ratings yet
- Case - 2.6 Ef (Star TCC)Document1 pageCase - 2.6 Ef (Star TCC)joshNo ratings yet
- Optimal Capacitor Placement Using EtapDocument8 pagesOptimal Capacitor Placement Using Etapjoydeep_d3232No ratings yet
- Distribution Ver. 3Document404 pagesDistribution Ver. 3Wrya Saeed100% (1)
- Fundamental Characteristics of Circuit BreakerDocument4 pagesFundamental Characteristics of Circuit Breakerdejanoski_aNo ratings yet
- Complex Short Circuit MVA Method For Power PDFDocument4 pagesComplex Short Circuit MVA Method For Power PDFluisNo ratings yet
- Cable Etap 01 18 2IN1 PDFDocument77 pagesCable Etap 01 18 2IN1 PDFMichael BesaNo ratings yet
- Torsional Stress and Double IntegrationDocument12 pagesTorsional Stress and Double IntegrationMr. DummyNo ratings yet
- Midspan Clearance - Calc SheetDocument1 pageMidspan Clearance - Calc SheetJoyce ChepkiruiNo ratings yet
- Energy Loss at 11kv Rural Distribution Feeders in Anand District A Case Study - Confer Paper - 2011 - Prajapati Et AlDocument3 pagesEnergy Loss at 11kv Rural Distribution Feeders in Anand District A Case Study - Confer Paper - 2011 - Prajapati Et AlBBJINo ratings yet
- KC Agarwal HitsDocument18 pagesKC Agarwal HitskittyNo ratings yet
- DRG Sesi 4 SDoF Forced VibrationDocument10 pagesDRG Sesi 4 SDoF Forced VibrationanggaNo ratings yet
- Lecture 2 - ME2617 Free Motion of Damped SystemsDocument33 pagesLecture 2 - ME2617 Free Motion of Damped SystemsHamzah QadriNo ratings yet
- Answer For Tutorial 2Document9 pagesAnswer For Tutorial 2Mukul ParasharNo ratings yet
- Full Chapter An Introduction To Computational Macroeconomics Economic Methodology Aneli Bongers PDFDocument53 pagesFull Chapter An Introduction To Computational Macroeconomics Economic Methodology Aneli Bongers PDFnancy.toone824100% (6)
- PNNL 24843Document196 pagesPNNL 24843FabSan21No ratings yet
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- El G 4125 Symmetrical FaultsDocument15 pagesEl G 4125 Symmetrical FaultsdjebienNo ratings yet
- CFX-Intro 14.5 L11 Transient PDFDocument22 pagesCFX-Intro 14.5 L11 Transient PDFmarcosandia1974No ratings yet
- Vibration Welding of Thermoplastics. Part I: Phenomenology of The Welding ProcessDocument10 pagesVibration Welding of Thermoplastics. Part I: Phenomenology of The Welding ProcessUriel PeñaNo ratings yet
- Chap 3 Material Balance For Non-Reactive Process - Part 1Document33 pagesChap 3 Material Balance For Non-Reactive Process - Part 1Tey KaijingNo ratings yet
- 10 1 1 456 5401 PDFDocument14 pages10 1 1 456 5401 PDFSreehari RgNo ratings yet
- Aspen Plus - Module IDocument193 pagesAspen Plus - Module IHafeez Ahmad50% (2)
- Protection of Embedded Generation SystemsDocument23 pagesProtection of Embedded Generation Systemseugene oneillNo ratings yet
- Dynamic Equivalents in Power System Studies A ReviDocument15 pagesDynamic Equivalents in Power System Studies A ReviRong GuoNo ratings yet
- Lecture 15 Steady-State Error For Unity Feedback SystemDocument28 pagesLecture 15 Steady-State Error For Unity Feedback SystemRammay Sb100% (1)
- Operability, Resiliency, and Flexibility: Process Design Objectives For A Changing WorldDocument83 pagesOperability, Resiliency, and Flexibility: Process Design Objectives For A Changing WorldannasitNo ratings yet
- Abaqus Example Problems Manual: Abaqus Version 6.6 ID: Printed OnDocument572 pagesAbaqus Example Problems Manual: Abaqus Version 6.6 ID: Printed OnmehtabpathanNo ratings yet
- Chapter 17 - Transient Stability AnalysisDocument45 pagesChapter 17 - Transient Stability AnalysisAbhijeet Kumar SinghNo ratings yet
- Transients in R-L Circuits: Fault AnalysisDocument5 pagesTransients in R-L Circuits: Fault AnalysisOkwalNo ratings yet
- PID Controller: Effects of Integral & Derivative Control Actions On System PerformanceDocument14 pagesPID Controller: Effects of Integral & Derivative Control Actions On System PerformanceNasar khan shamozaiNo ratings yet
- SPE DL 33 SPE 092116 (Camacho) Pressure Transient and Decline Curve Behaviors Par Pen Wells Completed NF Vuggy ReservoirsDocument14 pagesSPE DL 33 SPE 092116 (Camacho) Pressure Transient and Decline Curve Behaviors Par Pen Wells Completed NF Vuggy ReservoirsTiny EvalNo ratings yet
- ESS Topic 1 ReviewDocument4 pagesESS Topic 1 ReviewAnika HinkovaNo ratings yet
- First Order Single Tank System - AkritiDocument14 pagesFirst Order Single Tank System - AkritiAkritiNo ratings yet
- Wear Rate Grinding Ball PDFDocument12 pagesWear Rate Grinding Ball PDFLoraNo ratings yet
- Transient Stability Notes of KundurDocument14 pagesTransient Stability Notes of Kundurrasim_m1146No ratings yet
- IET Educational (Stephanie Hay) 5Document1 pageIET Educational (Stephanie Hay) 5dsoNo ratings yet
- Three Phase Faults - Muhit - Part1 (Version1)Document6 pagesThree Phase Faults - Muhit - Part1 (Version1)Ismat AraNo ratings yet
- Hypothetical Case Study-2015Document20 pagesHypothetical Case Study-2015Usman Ali KhanNo ratings yet
- Power Swing BlockingDocument4 pagesPower Swing Blockingdetectiveholmes0% (1)