
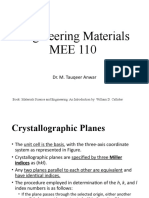
AD&C Lecture 1new
AD&C Lecture 1new
You might also like
- Scale SkillsDocument35 pagesScale Skillspengwang728100% (1)
- CUADERNO VACACIONES 5º EP-blogdeinglesdeamparo PDFDocument30 pagesCUADERNO VACACIONES 5º EP-blogdeinglesdeamparo PDFSandra Barrientos PalaciosNo ratings yet
- Opl 3 DatabaseDocument19 pagesOpl 3 Databasedeep_sorari7No ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Robotics Control L3Document105 pagesRobotics Control L3Lavesh GoyalNo ratings yet
- Lesson 7 Space FrameDocument24 pagesLesson 7 Space Framecriscab12345No ratings yet
- MECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- M ERIAMDocument51 pagesM ERIAMsauravkr2027No ratings yet
- Lecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsDocument9 pagesLecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsthgnguyenNo ratings yet
- Itu Lecture3 Rev01Document15 pagesItu Lecture3 Rev01Gülsüm YesirNo ratings yet
- Lecture 6Document32 pagesLecture 6Muhammad Usama Bin TahirNo ratings yet
- Week 07 - Attitude Dynamics and DeterminaitonDocument58 pagesWeek 07 - Attitude Dynamics and Determinaitoncoolgirl2611No ratings yet
- Robotics 7Document17 pagesRobotics 7nadiaNo ratings yet
- Rotation About A Fixed PointDocument31 pagesRotation About A Fixed PointGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Mechanical Vibration Ch-1Document36 pagesMechanical Vibration Ch-1Befikad BekeleNo ratings yet
- Ch02 2Document35 pagesCh02 2이재봉No ratings yet
- Modeling of Rotational Systems 2023Document62 pagesModeling of Rotational Systems 2023Ndyamusiima SeresiNo ratings yet
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- Flight Dynamics Full VersionDocument51 pagesFlight Dynamics Full Versiongirithik14No ratings yet
- Flight DynamicsDocument51 pagesFlight DynamicssteenbeekingNo ratings yet
- Chapter 3-1. Rigid Body MotionDocument47 pagesChapter 3-1. Rigid Body Motionkoyehyun0859No ratings yet
- Kinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaDocument13 pagesKinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaAndrew TorioNo ratings yet
- Robot Kinematics and DynamicsDocument22 pagesRobot Kinematics and DynamicsShyamalNo ratings yet
- Unit 2 (2D&3D Transformation)Document65 pagesUnit 2 (2D&3D Transformation)Shruti KuradeNo ratings yet
- Solid State Physics: Dr. Syed Rizwan AliDocument19 pagesSolid State Physics: Dr. Syed Rizwan AliMuntazir MehdiNo ratings yet
- ME101 Lecture33 KDDocument15 pagesME101 Lecture33 KDSatish Chandra BeraNo ratings yet
- Mechanics of Machines: ODL - Week 6Document54 pagesMechanics of Machines: ODL - Week 6Faheem AhmadNo ratings yet
- Lesson 5 Stiffness Method For FrmesDocument26 pagesLesson 5 Stiffness Method For Frmescriscab12345No ratings yet
- Points and Planes in 3DDocument30 pagesPoints and Planes in 3DAbsarNo ratings yet
- Wk6L16 18Document21 pagesWk6L16 18lengs SimzNo ratings yet
- Kinematically Indeterminate Structure. When A Structure Is Loaded, It Undergoes Deflection atDocument1 pageKinematically Indeterminate Structure. When A Structure Is Loaded, It Undergoes Deflection atmujeebNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- Lecture 2a Solid State PhysicsDocument17 pagesLecture 2a Solid State PhysicsShehnila KarimNo ratings yet
- Hardy Cross InvestigationDocument12 pagesHardy Cross InvestigationalonsoNo ratings yet
- Fundamentals of Vehicle Dynamics: Lecture 1-2Document26 pagesFundamentals of Vehicle Dynamics: Lecture 1-2obeidNo ratings yet
- Lesson 6 3D Framed StructuresDocument25 pagesLesson 6 3D Framed Structurescriscab12345No ratings yet
- Bending 6.3-6.4: Longitudinal Strain Flexure FormulaDocument33 pagesBending 6.3-6.4: Longitudinal Strain Flexure FormulaPrasad GNNo ratings yet
- Kinetics of A Rigid Body - LectureDocument12 pagesKinetics of A Rigid Body - LectureJohn David AbarquezNo ratings yet
- 5-Mechanism For ControlDocument164 pages5-Mechanism For ControlsolomonrajarNo ratings yet
- Gyroscopic CoupleDocument22 pagesGyroscopic CoupleRohit NewarNo ratings yet
- Robotics Kinematics and DynamicsDocument6 pagesRobotics Kinematics and Dynamicsfadyah yulitaNo ratings yet
- Lesson 08-AEuler AnglesDocument3 pagesLesson 08-AEuler AnglesMuhammad Yasar JavaidNo ratings yet
- Lesson 8-A:: Euler AnglesDocument3 pagesLesson 8-A:: Euler Anglesafe2000must9083No ratings yet
- 1 EBSD PrincipleDocument49 pages1 EBSD PrincipleandrianidebrinaNo ratings yet
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument26 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNo ratings yet
- Lecture 13, 14 - Chapter 6 Area Moments of InertiaDocument31 pagesLecture 13, 14 - Chapter 6 Area Moments of Inertiarobel metikuNo ratings yet
- CE511 Lecture #1Document20 pagesCE511 Lecture #1Zawad Khalil NiloyNo ratings yet
- L11 Monidipa PDFDocument112 pagesL11 Monidipa PDFAbhi JainNo ratings yet
- 3D Transformation PDFDocument23 pages3D Transformation PDFshivam007100% (1)
- Co-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesDocument23 pagesCo-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesrajeswariNo ratings yet
- Miller IndicesDocument18 pagesMiller IndicesDayanidhi Krishana PathakNo ratings yet
- Gyroscopic Instruments SystemDocument17 pagesGyroscopic Instruments Systemashwin pavithranNo ratings yet
- Industrial Robots: Chapter 3: Orientation KinematicsDocument21 pagesIndustrial Robots: Chapter 3: Orientation KinematicsNguyễn Đức TàiNo ratings yet
- AOE3134 Topic0Document9 pagesAOE3134 Topic0quockhanh29mtNo ratings yet
- Helicopterdynamics Chapter1Document34 pagesHelicopterdynamics Chapter1AlexandreSidantNo ratings yet
- Flight Dynamics (Fixed Wing Aircraft)Document17 pagesFlight Dynamics (Fixed Wing Aircraft)MOFEEZALAM100% (1)
- Chapter 3-2. Rigid Body MotionDocument51 pagesChapter 3-2. Rigid Body Motionkoyehyun0859No ratings yet
- Equations of Motion: Body - Fixed Coordinate SystemDocument2 pagesEquations of Motion: Body - Fixed Coordinate SystemNarendra Singh MauryaNo ratings yet
- Lec 5 - Crystallographic Points, Directions and Planes Cont...Document12 pagesLec 5 - Crystallographic Points, Directions and Planes Cont...Ali HassanNo ratings yet
- Texture BasicsDocument35 pagesTexture BasicsAmlan DasNo ratings yet
- Analyses of Hidrodynamic Radial Forces On Centrifugal PumpDocument9 pagesAnalyses of Hidrodynamic Radial Forces On Centrifugal PumpAvstron D'AgostiniNo ratings yet
- Wago-I/O-System 750: ManualDocument46 pagesWago-I/O-System 750: ManualHaris bayu kurniawanNo ratings yet
- Crushing It With YouTubeDocument30 pagesCrushing It With YouTubeEdwin Cuba Huamani100% (1)
- Big Bazaar CSRDocument5 pagesBig Bazaar CSRAustin Amaravati100% (1)
- Smart Attendance System Using Raspberry PiDocument5 pagesSmart Attendance System Using Raspberry PiEditor IJTSRDNo ratings yet
- Trade Marketing and Its EffectsDocument32 pagesTrade Marketing and Its EffectsTrân Trần Ngọc BảoNo ratings yet
- Note On Comparison On IFRS 17 and IAS 19Document2 pagesNote On Comparison On IFRS 17 and IAS 19xinaxulaNo ratings yet
- Biological Classification BioHackDocument15 pagesBiological Classification BioHackAdhithyan M100% (2)
- Reading and Writing TOS With ExamDocument2 pagesReading and Writing TOS With Examjoy grace jaraNo ratings yet
- Allegheny 316 PDFDocument13 pagesAllegheny 316 PDFJoshua WalkerNo ratings yet
- WHLP Math 7 Q1 W5Document3 pagesWHLP Math 7 Q1 W5MMC HUMSS 11No ratings yet
- (Challenges and Advances in Computational Chemistry and Physics 24) Kunal Roy (eds.) - Advances in QSAR Modeling_ Applications in Pharmaceutical, Chemical, Food, Agricultural and Environmental Science.pdfDocument555 pages(Challenges and Advances in Computational Chemistry and Physics 24) Kunal Roy (eds.) - Advances in QSAR Modeling_ Applications in Pharmaceutical, Chemical, Food, Agricultural and Environmental Science.pdfKamatchi SankarNo ratings yet
- GEZE - Installation Instructions - EN - 1105614Document20 pagesGEZE - Installation Instructions - EN - 1105614eng.rami.ghassanNo ratings yet
- Dln2 Extender Package 2008-2009Document10 pagesDln2 Extender Package 2008-2009atfrost4638No ratings yet
- World History Hand Written Notes (156 Pages) PDF (WWW - upscPDF.com)Document156 pagesWorld History Hand Written Notes (156 Pages) PDF (WWW - upscPDF.com)gokul shanmugamNo ratings yet
- Contemporary Business 16th Edition Boone Test Bank 1Document29 pagesContemporary Business 16th Edition Boone Test Bank 1mary100% (36)
- Talents For Noble - Star Wars RPGDocument1 pageTalents For Noble - Star Wars RPGAlexandreCasarindeLimaNo ratings yet
- IB Assignment Tue 12-3Document2 pagesIB Assignment Tue 12-3MIR HASSANNo ratings yet
- VISIC100SF en V2-0 2015-08Document108 pagesVISIC100SF en V2-0 2015-08VolvoxdjNo ratings yet
- Recalls 7 NP2Document18 pagesRecalls 7 NP2Mary Danielle SaludarioNo ratings yet
- Jam's Plumbing Tools ReviewerDocument149 pagesJam's Plumbing Tools ReviewerJamaron TatingNo ratings yet
- School Zone DatabaseDocument18 pagesSchool Zone DatabaseActionNewsJaxNo ratings yet
- Statistics Final Pre TestDocument4 pagesStatistics Final Pre TestLorienelNo ratings yet
- The Analysis of IpodDocument19 pagesThe Analysis of IpodRachel WilliamsonNo ratings yet
- How To Install MDMDocument9 pagesHow To Install MDMDomingo GarcíaNo ratings yet
- Ricoh MP2550 Parts CatalogDocument135 pagesRicoh MP2550 Parts Catalogmorganco1100% (1)
- Finpro FeatureDocument2 pagesFinpro FeaturesinglerakeshNo ratings yet
























































































Download as pptx, pdf, or txt
You might also like
- Scale SkillsDocument35 pagesScale Skillspengwang728100% (1)
- CUADERNO VACACIONES 5º EP-blogdeinglesdeamparo PDFDocument30 pagesCUADERNO VACACIONES 5º EP-blogdeinglesdeamparo PDFSandra Barrientos PalaciosNo ratings yet
- Opl 3 DatabaseDocument19 pagesOpl 3 Databasedeep_sorari7No ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Robotics Control L3Document105 pagesRobotics Control L3Lavesh GoyalNo ratings yet
- Lesson 7 Space FrameDocument24 pagesLesson 7 Space Framecriscab12345No ratings yet
- MECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- M ERIAMDocument51 pagesM ERIAMsauravkr2027No ratings yet
- Lecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsDocument9 pagesLecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsthgnguyenNo ratings yet
- Itu Lecture3 Rev01Document15 pagesItu Lecture3 Rev01Gülsüm YesirNo ratings yet
- Lecture 6Document32 pagesLecture 6Muhammad Usama Bin TahirNo ratings yet
- Week 07 - Attitude Dynamics and DeterminaitonDocument58 pagesWeek 07 - Attitude Dynamics and Determinaitoncoolgirl2611No ratings yet
- Robotics 7Document17 pagesRobotics 7nadiaNo ratings yet
- Rotation About A Fixed PointDocument31 pagesRotation About A Fixed PointGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Mechanical Vibration Ch-1Document36 pagesMechanical Vibration Ch-1Befikad BekeleNo ratings yet
- Ch02 2Document35 pagesCh02 2이재봉No ratings yet
- Modeling of Rotational Systems 2023Document62 pagesModeling of Rotational Systems 2023Ndyamusiima SeresiNo ratings yet
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- Flight Dynamics Full VersionDocument51 pagesFlight Dynamics Full Versiongirithik14No ratings yet
- Flight DynamicsDocument51 pagesFlight DynamicssteenbeekingNo ratings yet
- Chapter 3-1. Rigid Body MotionDocument47 pagesChapter 3-1. Rigid Body Motionkoyehyun0859No ratings yet
- Kinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaDocument13 pagesKinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaAndrew TorioNo ratings yet
- Robot Kinematics and DynamicsDocument22 pagesRobot Kinematics and DynamicsShyamalNo ratings yet
- Unit 2 (2D&3D Transformation)Document65 pagesUnit 2 (2D&3D Transformation)Shruti KuradeNo ratings yet
- Solid State Physics: Dr. Syed Rizwan AliDocument19 pagesSolid State Physics: Dr. Syed Rizwan AliMuntazir MehdiNo ratings yet
- ME101 Lecture33 KDDocument15 pagesME101 Lecture33 KDSatish Chandra BeraNo ratings yet
- Mechanics of Machines: ODL - Week 6Document54 pagesMechanics of Machines: ODL - Week 6Faheem AhmadNo ratings yet
- Lesson 5 Stiffness Method For FrmesDocument26 pagesLesson 5 Stiffness Method For Frmescriscab12345No ratings yet
- Points and Planes in 3DDocument30 pagesPoints and Planes in 3DAbsarNo ratings yet
- Wk6L16 18Document21 pagesWk6L16 18lengs SimzNo ratings yet
- Kinematically Indeterminate Structure. When A Structure Is Loaded, It Undergoes Deflection atDocument1 pageKinematically Indeterminate Structure. When A Structure Is Loaded, It Undergoes Deflection atmujeebNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- Lecture 2a Solid State PhysicsDocument17 pagesLecture 2a Solid State PhysicsShehnila KarimNo ratings yet
- Hardy Cross InvestigationDocument12 pagesHardy Cross InvestigationalonsoNo ratings yet
- Fundamentals of Vehicle Dynamics: Lecture 1-2Document26 pagesFundamentals of Vehicle Dynamics: Lecture 1-2obeidNo ratings yet
- Lesson 6 3D Framed StructuresDocument25 pagesLesson 6 3D Framed Structurescriscab12345No ratings yet
- Bending 6.3-6.4: Longitudinal Strain Flexure FormulaDocument33 pagesBending 6.3-6.4: Longitudinal Strain Flexure FormulaPrasad GNNo ratings yet
- Kinetics of A Rigid Body - LectureDocument12 pagesKinetics of A Rigid Body - LectureJohn David AbarquezNo ratings yet
- 5-Mechanism For ControlDocument164 pages5-Mechanism For ControlsolomonrajarNo ratings yet
- Gyroscopic CoupleDocument22 pagesGyroscopic CoupleRohit NewarNo ratings yet
- Robotics Kinematics and DynamicsDocument6 pagesRobotics Kinematics and Dynamicsfadyah yulitaNo ratings yet
- Lesson 08-AEuler AnglesDocument3 pagesLesson 08-AEuler AnglesMuhammad Yasar JavaidNo ratings yet
- Lesson 8-A:: Euler AnglesDocument3 pagesLesson 8-A:: Euler Anglesafe2000must9083No ratings yet
- 1 EBSD PrincipleDocument49 pages1 EBSD PrincipleandrianidebrinaNo ratings yet
- Navigation and Guidance: Dr. Shashi Ranjan KumarDocument26 pagesNavigation and Guidance: Dr. Shashi Ranjan KumarNinad KaleNo ratings yet
- Lecture 13, 14 - Chapter 6 Area Moments of InertiaDocument31 pagesLecture 13, 14 - Chapter 6 Area Moments of Inertiarobel metikuNo ratings yet
- CE511 Lecture #1Document20 pagesCE511 Lecture #1Zawad Khalil NiloyNo ratings yet
- L11 Monidipa PDFDocument112 pagesL11 Monidipa PDFAbhi JainNo ratings yet
- 3D Transformation PDFDocument23 pages3D Transformation PDFshivam007100% (1)
- Co-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesDocument23 pagesCo-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesrajeswariNo ratings yet
- Miller IndicesDocument18 pagesMiller IndicesDayanidhi Krishana PathakNo ratings yet
- Gyroscopic Instruments SystemDocument17 pagesGyroscopic Instruments Systemashwin pavithranNo ratings yet
- Industrial Robots: Chapter 3: Orientation KinematicsDocument21 pagesIndustrial Robots: Chapter 3: Orientation KinematicsNguyễn Đức TàiNo ratings yet
- AOE3134 Topic0Document9 pagesAOE3134 Topic0quockhanh29mtNo ratings yet
- Helicopterdynamics Chapter1Document34 pagesHelicopterdynamics Chapter1AlexandreSidantNo ratings yet
- Flight Dynamics (Fixed Wing Aircraft)Document17 pagesFlight Dynamics (Fixed Wing Aircraft)MOFEEZALAM100% (1)
- Chapter 3-2. Rigid Body MotionDocument51 pagesChapter 3-2. Rigid Body Motionkoyehyun0859No ratings yet
- Equations of Motion: Body - Fixed Coordinate SystemDocument2 pagesEquations of Motion: Body - Fixed Coordinate SystemNarendra Singh MauryaNo ratings yet
- Lec 5 - Crystallographic Points, Directions and Planes Cont...Document12 pagesLec 5 - Crystallographic Points, Directions and Planes Cont...Ali HassanNo ratings yet
- Texture BasicsDocument35 pagesTexture BasicsAmlan DasNo ratings yet
- Analyses of Hidrodynamic Radial Forces On Centrifugal PumpDocument9 pagesAnalyses of Hidrodynamic Radial Forces On Centrifugal PumpAvstron D'AgostiniNo ratings yet
- Wago-I/O-System 750: ManualDocument46 pagesWago-I/O-System 750: ManualHaris bayu kurniawanNo ratings yet
- Crushing It With YouTubeDocument30 pagesCrushing It With YouTubeEdwin Cuba Huamani100% (1)
- Big Bazaar CSRDocument5 pagesBig Bazaar CSRAustin Amaravati100% (1)
- Smart Attendance System Using Raspberry PiDocument5 pagesSmart Attendance System Using Raspberry PiEditor IJTSRDNo ratings yet
- Trade Marketing and Its EffectsDocument32 pagesTrade Marketing and Its EffectsTrân Trần Ngọc BảoNo ratings yet
- Note On Comparison On IFRS 17 and IAS 19Document2 pagesNote On Comparison On IFRS 17 and IAS 19xinaxulaNo ratings yet
- Biological Classification BioHackDocument15 pagesBiological Classification BioHackAdhithyan M100% (2)
- Reading and Writing TOS With ExamDocument2 pagesReading and Writing TOS With Examjoy grace jaraNo ratings yet
- Allegheny 316 PDFDocument13 pagesAllegheny 316 PDFJoshua WalkerNo ratings yet
- WHLP Math 7 Q1 W5Document3 pagesWHLP Math 7 Q1 W5MMC HUMSS 11No ratings yet
- (Challenges and Advances in Computational Chemistry and Physics 24) Kunal Roy (eds.) - Advances in QSAR Modeling_ Applications in Pharmaceutical, Chemical, Food, Agricultural and Environmental Science.pdfDocument555 pages(Challenges and Advances in Computational Chemistry and Physics 24) Kunal Roy (eds.) - Advances in QSAR Modeling_ Applications in Pharmaceutical, Chemical, Food, Agricultural and Environmental Science.pdfKamatchi SankarNo ratings yet
- GEZE - Installation Instructions - EN - 1105614Document20 pagesGEZE - Installation Instructions - EN - 1105614eng.rami.ghassanNo ratings yet
- Dln2 Extender Package 2008-2009Document10 pagesDln2 Extender Package 2008-2009atfrost4638No ratings yet
- World History Hand Written Notes (156 Pages) PDF (WWW - upscPDF.com)Document156 pagesWorld History Hand Written Notes (156 Pages) PDF (WWW - upscPDF.com)gokul shanmugamNo ratings yet
- Contemporary Business 16th Edition Boone Test Bank 1Document29 pagesContemporary Business 16th Edition Boone Test Bank 1mary100% (36)
- Talents For Noble - Star Wars RPGDocument1 pageTalents For Noble - Star Wars RPGAlexandreCasarindeLimaNo ratings yet
- IB Assignment Tue 12-3Document2 pagesIB Assignment Tue 12-3MIR HASSANNo ratings yet
- VISIC100SF en V2-0 2015-08Document108 pagesVISIC100SF en V2-0 2015-08VolvoxdjNo ratings yet
- Recalls 7 NP2Document18 pagesRecalls 7 NP2Mary Danielle SaludarioNo ratings yet
- Jam's Plumbing Tools ReviewerDocument149 pagesJam's Plumbing Tools ReviewerJamaron TatingNo ratings yet
- School Zone DatabaseDocument18 pagesSchool Zone DatabaseActionNewsJaxNo ratings yet
- Statistics Final Pre TestDocument4 pagesStatistics Final Pre TestLorienelNo ratings yet
- The Analysis of IpodDocument19 pagesThe Analysis of IpodRachel WilliamsonNo ratings yet
- How To Install MDMDocument9 pagesHow To Install MDMDomingo GarcíaNo ratings yet
- Ricoh MP2550 Parts CatalogDocument135 pagesRicoh MP2550 Parts Catalogmorganco1100% (1)
- Finpro FeatureDocument2 pagesFinpro FeaturesinglerakeshNo ratings yet