Download as pptx, pdf, or txt
You might also like
- Confederate Pulp and PaperDocument3 pagesConfederate Pulp and PaperShreeraj PawarNo ratings yet
- Answers To Selected Exercise Problems StrogatzDocument9 pagesAnswers To Selected Exercise Problems StrogatzbalterNo ratings yet
- Kattan CDDocument6 pagesKattan CDSebastiao SilvaNo ratings yet
- Chapter 5 Control Structures II (Repetition)Document69 pagesChapter 5 Control Structures II (Repetition)Syed SamsamuddinNo ratings yet
- All Current Mid Term Papers Spring 2019 Pattern & Questions File Last Updated 18-06-2019 05.21PMDocument96 pagesAll Current Mid Term Papers Spring 2019 Pattern & Questions File Last Updated 18-06-2019 05.21PMhamza100% (1)
- E420VO ServiceManualDocument96 pagesE420VO ServiceManualSteven Salwey100% (1)
- Digital Image Processing: Lect #12Document35 pagesDigital Image Processing: Lect #12nnehasinghNo ratings yet
- Lecture 3. Filtering in The Frequency DomainDocument123 pagesLecture 3. Filtering in The Frequency DomainAshish PatelNo ratings yet
- International Geogebra Conference For Southeast Europe January 15-16, Novi Sad, SerbiaDocument15 pagesInternational Geogebra Conference For Southeast Europe January 15-16, Novi Sad, Serbiacarlos9leoNo ratings yet
- Chapter 3: The Image, Its Mathematical and Physical BackgroundDocument53 pagesChapter 3: The Image, Its Mathematical and Physical BackgroundjeysamNo ratings yet
- L11 FourierPropertiesDocument14 pagesL11 FourierPropertiesCanio NoceNo ratings yet
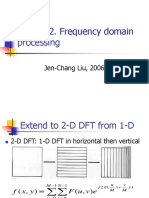
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Metode Beda HinggaDocument44 pagesMetode Beda HinggaYadi Elsa NDNo ratings yet
- Fourier Transform IIDocument34 pagesFourier Transform IIarkar myintNo ratings yet
- CH 3 Math of ThermodynamicsDocument16 pagesCH 3 Math of Thermodynamicsmailsk123No ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Calculo2 - Lista1Document1 pageCalculo2 - Lista1Daniel EdwardesNo ratings yet
- Chapter 13 Vector Integral Calculus: DiscussionsDocument47 pagesChapter 13 Vector Integral Calculus: DiscussionsAhmed mohyNo ratings yet
- Computational Fluid Dynamics : February 28Document68 pagesComputational Fluid Dynamics : February 28Tatenda NyabadzaNo ratings yet
- Chapter 13 Vector Integral Calculus: DiscussionsDocument13 pagesChapter 13 Vector Integral Calculus: DiscussionsAhmed mohyNo ratings yet
- Chapter 5a Z-TransformDocument55 pagesChapter 5a Z-Transformfarina ilyanaNo ratings yet
- Formulas (EXAM)Document3 pagesFormulas (EXAM)Thanh Dat NguyenNo ratings yet
- Signals and Systems Class 12Document20 pagesSignals and Systems Class 12wizarderbrNo ratings yet
- Partial Differentiations: F Z X ZDocument6 pagesPartial Differentiations: F Z X ZxzNo ratings yet
- Dupire Functional ItoDocument43 pagesDupire Functional ItoRayan RayanNo ratings yet
- Week 6Document21 pagesWeek 6Shehabeldeen Hesham Mahmoud AbdelmoatyNo ratings yet
- Finite Element Method: Mechanical Engineering DepartmentDocument27 pagesFinite Element Method: Mechanical Engineering DepartmentmNo ratings yet
- Finite Element Method: Mechanical Engineering DepartmentDocument27 pagesFinite Element Method: Mechanical Engineering DepartmentmNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- 5 FFTDocument39 pages5 FFTMuthu Mari100% (2)
- Sinusoids and PhasorsDocument18 pagesSinusoids and PhasorsStephen MooreNo ratings yet
- 1 - DFT & IdftDocument29 pages1 - DFT & IdftMuthu MariNo ratings yet
- FMO Solved Exercise Collection PDFDocument62 pagesFMO Solved Exercise Collection PDFGiannis GiannakidisNo ratings yet
- Lecture 5 MathDocument16 pagesLecture 5 Mathrahmahamjad90No ratings yet
- Formulas (QUIZ)Document2 pagesFormulas (QUIZ)Thanh Dat NguyenNo ratings yet
- Dip Spatial FilteringDocument32 pagesDip Spatial FilteringMadhuri PotluriNo ratings yet
- EE207 Min1 SolsDocument3 pagesEE207 Min1 SolsSumit BahlNo ratings yet
- Digital Image Processing: Lecture 9 and 10Document35 pagesDigital Image Processing: Lecture 9 and 10nnehasinghNo ratings yet
- CALCULUS-II Lec Notes (Set 2)Document23 pagesCALCULUS-II Lec Notes (Set 2)mwendwakelvin842No ratings yet
- Partial Differential Equations (Pde)Document84 pagesPartial Differential Equations (Pde)潘詠潤No ratings yet
- Solution Sample Exam 2017Document4 pagesSolution Sample Exam 2017Hoàng HàNo ratings yet
- Planes PDFDocument2 pagesPlanes PDFsajadNo ratings yet
- Integration - MTH0002 - Lecture Notes (7) - Spring 2023 - Dr. Fayad GalalDocument63 pagesIntegration - MTH0002 - Lecture Notes (7) - Spring 2023 - Dr. Fayad Galalziad abdelkadrNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Vector Calculus R16Document87 pagesVector Calculus R16Meghna SahaNo ratings yet
- Richard Quiñones RamirezDocument14 pagesRichard Quiñones RamirezRichard QuiñonesNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- Triple Integral HandoutDocument80 pagesTriple Integral HandoutHiếu HôNo ratings yet
- Pde UkDocument30 pagesPde UkAlfredo GarcíaNo ratings yet
- Discrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazaDocument27 pagesDiscrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazadeepthiNo ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument10 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inSonu kumarNo ratings yet
- SS202B 2015final SolDocument11 pagesSS202B 2015final Sol박천우No ratings yet
- Integrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GaussDocument44 pagesIntegrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GausssFDfdsNo ratings yet
- Fourier Series Notes PDFDocument39 pagesFourier Series Notes PDFsudarshan poojaryNo ratings yet
- L51-Vector Fields and Line IntegralsDocument37 pagesL51-Vector Fields and Line IntegralsQuynh-AnhNo ratings yet
- 13.2 Line IntegralsDocument17 pages13.2 Line Integrals21142467No ratings yet
- Differentiation Under The Integral Sign 2Document12 pagesDifferentiation Under The Integral Sign 2ssfddNo ratings yet
- Math 23 Lecture 3.7 Line Integral of Scalar FieldsDocument22 pagesMath 23 Lecture 3.7 Line Integral of Scalar FieldsyeahNo ratings yet
- Lecture 10 - Particles in 3D Box and Hydrogen AtomDocument28 pagesLecture 10 - Particles in 3D Box and Hydrogen AtomArc ZeroNo ratings yet
- Continuous Time MPDocument5 pagesContinuous Time MPTanya GuptaNo ratings yet
- Chapter FiveDocument13 pagesChapter FiveZiaul HaqueNo ratings yet
- Greens TheoremDocument20 pagesGreens TheoremAnupam ChakrabortyNo ratings yet
- Paper: Iit-Jam 2006Document4 pagesPaper: Iit-Jam 2006Mr MNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 12 44 17Document14 pages12 44 17Salvador HUEBRA ARANANo ratings yet
- What We're Providing YouDocument3 pagesWhat We're Providing Yourakshit123No ratings yet
- CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsDocument21 pagesCH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsVSRI1993No ratings yet
- Datasheet Acs 120 PDFDocument11 pagesDatasheet Acs 120 PDFyudi heriyantoNo ratings yet
- Using Technology To Address Barriers To Learning: Technical Assistance SamplerDocument66 pagesUsing Technology To Address Barriers To Learning: Technical Assistance SamplerKAINo ratings yet
- 2 InterfacesDocument3 pages2 InterfacesacrofoNo ratings yet
- Ec2 UgDocument1,425 pagesEc2 UgajdeinNo ratings yet
- IT Chapter 11Document6 pagesIT Chapter 11Elyani RamliNo ratings yet
- Bit Mesra Architecture SyllabusDocument101 pagesBit Mesra Architecture SyllabusSrishti ShamelNo ratings yet
- Cryptool Lab f05Document6 pagesCryptool Lab f05Vanesa Daza50% (2)
- Assignment No. 3: 1. Plot of Loss Function J Vs Number of IterationsDocument6 pagesAssignment No. 3: 1. Plot of Loss Function J Vs Number of Iterationssun_917443954No ratings yet
- Usage of Control Structure: Message Even Number'Document9 pagesUsage of Control Structure: Message Even Number'KARTHIK MNo ratings yet
- Tutorial 0 - Part B Modelling Groundwater Flow Using FreewatDocument50 pagesTutorial 0 - Part B Modelling Groundwater Flow Using FreewatУрошМилићNo ratings yet
- A Client That Is Used For Daily Transaction Is Called Production ClientDocument3 pagesA Client That Is Used For Daily Transaction Is Called Production ClientrizkaNo ratings yet
- White Paper Software As A Medical Device SaMD What It Is and Why It Matters June 5 2019Document21 pagesWhite Paper Software As A Medical Device SaMD What It Is and Why It Matters June 5 2019keerthanaaNo ratings yet
- PassoloManual11 PDFDocument293 pagesPassoloManual11 PDFJulio Cesar Sousa AmaralNo ratings yet
- Program Guide WinPE 10-8 Sergei StrelecDocument34 pagesProgram Guide WinPE 10-8 Sergei Strelecnemos88100% (1)
- Evo Controller 8200 PartnerDocument79 pagesEvo Controller 8200 PartnerOnjanohasoavina MANANJARASOANo ratings yet
- TRITEC Product Catalogue EnuDocument192 pagesTRITEC Product Catalogue EnuJie RongNo ratings yet
- Idc Business Value Whitepaper PDFDocument15 pagesIdc Business Value Whitepaper PDFDaniloNo ratings yet
- Software Engineering-II-Course Readiness-Lesson PlanDocument13 pagesSoftware Engineering-II-Course Readiness-Lesson PlanAbdul RehmanNo ratings yet
- Traffic Sign Recognition Using Machine Learning Models For Smart Driving Support SystemDocument21 pagesTraffic Sign Recognition Using Machine Learning Models For Smart Driving Support SystemRahul JajuNo ratings yet
- C - Asphalt Mixing Plants in Container Design - ECO - ENDocument15 pagesC - Asphalt Mixing Plants in Container Design - ECO - ENvan long BuiNo ratings yet
- Fireworks: Graphical Command Interface Application and OperationDocument6 pagesFireworks: Graphical Command Interface Application and Operationmartin saadNo ratings yet
- 2023 09 12 17 56 35 HP LogDocument151 pages2023 09 12 17 56 35 HP LogTriust XDNo ratings yet