Download as ppt, pdf, or txt
You might also like
- Image Restoration 2Document25 pagesImage Restoration 2A JNo ratings yet
- Module 4 - 2Document41 pagesModule 4 - 2AEC OFFICIALNo ratings yet
- 03 - Image TransformsDocument9 pages03 - Image TransformsrajendrasoloniNo ratings yet
- Integrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GaussDocument44 pagesIntegrals of Vector Fields Over Lines/curves and Surfaces - Prac:ce With Stokes (Green), GausssFDfdsNo ratings yet
- Image RestorationDocument66 pagesImage RestorationSanchita GhoshNo ratings yet
- Cee235b Handout JacobianDocument4 pagesCee235b Handout JacobianNguyen DuyNo ratings yet
- Reconstruction: The ProblemDocument27 pagesReconstruction: The ProblemAdma KumalaNo ratings yet
- Local Influence - by Manuel Galea Et - Al 1997Document9 pagesLocal Influence - by Manuel Galea Et - Al 1997Érica Vieira NogueiraNo ratings yet
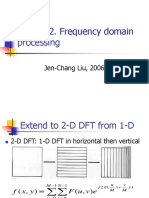
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Vibrations of Single Degree of Freedom Systems: M X (T) F (T) KDocument25 pagesVibrations of Single Degree of Freedom Systems: M X (T) F (T) KIbraheem OlugbadeNo ratings yet
- L21 - Restoration Filters - IDocument18 pagesL21 - Restoration Filters - IramadeviNo ratings yet
- Image Restoration II & Morphological Processing: Comp344 Tutorial Kai ZhangDocument20 pagesImage Restoration II & Morphological Processing: Comp344 Tutorial Kai Zhangtigoldo2008No ratings yet
- Simple OscillatorsDocument41 pagesSimple OscillatorsCristian TuctoNo ratings yet
- Lesson 8 VC.06 Day1Document15 pagesLesson 8 VC.06 Day1Sri RaghavanNo ratings yet
- Assignment: Qualitative TheoryDocument70 pagesAssignment: Qualitative TheoryTahera ParvinNo ratings yet
- Geographically Weighted Regression Technique For Spatial Data AnalysisDocument14 pagesGeographically Weighted Regression Technique For Spatial Data AnalysisMarto BMNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- Zeta Regularization Applied To The Problem of Renormalization and Riemann HypothesisDocument11 pagesZeta Regularization Applied To The Problem of Renormalization and Riemann Hypothesiseljose1234No ratings yet
- Dr. Wenjie Dong: Department of Electrical and Computer Engineering, The University of Texas Rio Grande ValleyDocument17 pagesDr. Wenjie Dong: Department of Electrical and Computer Engineering, The University of Texas Rio Grande ValleyMd Nur-A-Adam DonyNo ratings yet
- Boundary Value Problems For Frational DifferentialDocument12 pagesBoundary Value Problems For Frational Differentialdarwin.mamaniNo ratings yet
- The Jacobian of A Transformation 1Document4 pagesThe Jacobian of A Transformation 1Ankur SinghNo ratings yet
- Algebraic: (I.T. Leong) Math 200 in 2010 2010 C 10 7 F 1 / 24Document28 pagesAlgebraic: (I.T. Leong) Math 200 in 2010 2010 C 10 7 F 1 / 24eouahiauNo ratings yet
- Chapter 2 Math ModeingDocument26 pagesChapter 2 Math ModeingcesamavNo ratings yet
- Estimation of Degradation Function-1Document9 pagesEstimation of Degradation Function-1Abhinav Bhardwaj0% (1)
- Structural Element Stiffness, Mass, and Damping Matrices: 1 PreliminariesDocument50 pagesStructural Element Stiffness, Mass, and Damping Matrices: 1 PreliminariesChristian ZoundjiNo ratings yet
- Linear System Theory: Dr. Vali UddinDocument27 pagesLinear System Theory: Dr. Vali UddinMuhammad HassanNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Convolutions: Presented by From StoutDocument22 pagesConvolutions: Presented by From StoutDipen BarotNo ratings yet
- Structural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesDocument28 pagesStructural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesZahid RahmanNo ratings yet
- Vol7 Iss4 246 - 254 Existence and Uniqueness of SolutioDocument9 pagesVol7 Iss4 246 - 254 Existence and Uniqueness of SolutioBoutiara AbdellatifNo ratings yet
- Integration by A Change of VariablesDocument3 pagesIntegration by A Change of VariablesRajNo ratings yet
- Efficient and Exact Simulation of The Gaussian Affine Interest Rate ModelsDocument14 pagesEfficient and Exact Simulation of The Gaussian Affine Interest Rate ModelsvansteeNo ratings yet
- MA 201: Partial Differential Equations Lecture - 3Document18 pagesMA 201: Partial Differential Equations Lecture - 3Sahrish AsifNo ratings yet
- Ece-Vii-Image Processing U3Document7 pagesEce-Vii-Image Processing U32VD17EC 054No ratings yet
- Lecture 11Document38 pagesLecture 11Abdullah NadeemNo ratings yet
- A Family of Estimators of Population Mean Using Multiauxiliary Information in Presence of Measurement ErrorsDocument19 pagesA Family of Estimators of Population Mean Using Multiauxiliary Information in Presence of Measurement ErrorsScience DirectNo ratings yet
- Vibration of Continuous SystemsDocument21 pagesVibration of Continuous SystemsHossam T BadranNo ratings yet
- Fractional Sobolev Space With Riemann-Liouville Fractional DerivativeDocument28 pagesFractional Sobolev Space With Riemann-Liouville Fractional Derivativecesar576No ratings yet
- Lines and Planes in Space: PPTV TDocument88 pagesLines and Planes in Space: PPTV TPrateek SInghNo ratings yet
- Figures From Gonzalez and Woods, Digital Image Processing, Second Edition, 2002Document21 pagesFigures From Gonzalez and Woods, Digital Image Processing, Second Edition, 2002Priyanka ChauahnNo ratings yet
- State Space Representation of Gaussian ProcessesDocument45 pagesState Space Representation of Gaussian ProcessesKamalesh BhowmikNo ratings yet
- Unsteady Flow Using Method of CharacteristicsDocument38 pagesUnsteady Flow Using Method of CharacteristicsmelgamalNo ratings yet
- Adient and DivergenceDocument6 pagesAdient and DivergenceBipanjit SinghNo ratings yet
- Journal of Mathematical Analysis and Applications: Optimal Control of Semilinear Parabolic Systems With State ConstraintDocument17 pagesJournal of Mathematical Analysis and Applications: Optimal Control of Semilinear Parabolic Systems With State ConstraintHùng PhạmNo ratings yet
- A Reliable Algorithm For Solving Cauchy-Euler Differential EquationDocument10 pagesA Reliable Algorithm For Solving Cauchy-Euler Differential Equation8103 Suyash DewanganNo ratings yet
- Planes PDFDocument2 pagesPlanes PDFsajadNo ratings yet
- HW 1Document8 pagesHW 1Mahmudul HasanNo ratings yet
- UNIT-6 Multivariable Calculus (DOC FILE)Document15 pagesUNIT-6 Multivariable Calculus (DOC FILE)chinoerageorge0No ratings yet
- Euler Lagrange Differental Equation: TopicDocument12 pagesEuler Lagrange Differental Equation: TopicTapash BasakNo ratings yet
- Existence and Uniqueness Results For BVP of Nonlinear Fractional Volterra-Fredholm Integro-Differential EquationDocument12 pagesExistence and Uniqueness Results For BVP of Nonlinear Fractional Volterra-Fredholm Integro-Differential EquationPrince BhartiNo ratings yet
- Linear Systems Lecture 3. ControllabilityDocument4 pagesLinear Systems Lecture 3. ControllabilitydnvnNo ratings yet
- Numerical Methods For Solving Ordinary Differential EquationsDocument45 pagesNumerical Methods For Solving Ordinary Differential EquationsSupratim BhattacharjeeNo ratings yet
- Transmission 4Document13 pagesTransmission 4Wael YoussefNo ratings yet
- Math3.6 Differential OperatorsDocument14 pagesMath3.6 Differential OperatorsMoaaz AshrafNo ratings yet
- Wavelet J2KDocument56 pagesWavelet J2Kyt peekNo ratings yet
- Structural ElementsDocument33 pagesStructural ElementsvamshiNo ratings yet
- On A Boundary-Value Problem For A Fourth-Order Partial Integro-Differential Equation With Degenerate KernelDocument16 pagesOn A Boundary-Value Problem For A Fourth-Order Partial Integro-Differential Equation With Degenerate KernelSgk ManikandanNo ratings yet
- Exponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt ProcessDocument21 pagesExponential Behavior of Neutral Impulsive Stochastic Integro-Differential Equations Driven by Poisson Jumps and Rosenblatt Processmoulay kebirNo ratings yet
- Electrodynamics (Gradient, Divergence and Curl)Document6 pagesElectrodynamics (Gradient, Divergence and Curl)Jay NahataNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- ImageProcessing6 SpatialFiltering2Document33 pagesImageProcessing6 SpatialFiltering2Mudathir AyomideNo ratings yet
- The Normal Distribution: Probability & Statistics PF 2010Document2 pagesThe Normal Distribution: Probability & Statistics PF 2010Mudathir AyomideNo ratings yet
- First-Order Logic - w9Document35 pagesFirst-Order Logic - w9Mudathir AyomideNo ratings yet
- EE408 Digital Signal Processing OL12Document18 pagesEE408 Digital Signal Processing OL12Mudathir AyomideNo ratings yet
- Chemistry Lecture NotesDocument83 pagesChemistry Lecture NotesMudathir AyomideNo ratings yet
- 1 - Restless Earth UPDATEDDocument4 pages1 - Restless Earth UPDATEDMROHANLONNo ratings yet
- APACS Stabilizer Flyer October 2013Document2 pagesAPACS Stabilizer Flyer October 2013Cesar Fernando Sarrin CepedaNo ratings yet
- DR - B - R - Kerur, Dept - of Physics, GUGDocument8 pagesDR - B - R - Kerur, Dept - of Physics, GUGkerurbrk2009No ratings yet
- Parad ShivlingDocument2 pagesParad ShivlingsharathVEMNo ratings yet
- Coleção Da Taverna - Parte 2Document364 pagesColeção Da Taverna - Parte 2Physis Asclepius100% (2)
- CE 383 Course Outline Spring 2017 2018Document2 pagesCE 383 Course Outline Spring 2017 2018Ali ErbaşNo ratings yet
- SSR HmiDocument16 pagesSSR HmiAnandharaj .KNo ratings yet
- Preventing Misuse of Medicines DR - Marwa Salih Al-NaimiDocument12 pagesPreventing Misuse of Medicines DR - Marwa Salih Al-NaimiMustafa MuayedNo ratings yet
- Cell Division: Mitosis & MeiosisDocument50 pagesCell Division: Mitosis & MeiosisLyca GunayNo ratings yet
- 1986 GT CatalogDocument16 pages1986 GT CatalogtspinnerNo ratings yet
- What Is The Production Process of Inorganic Pigment PowderDocument3 pagesWhat Is The Production Process of Inorganic Pigment Powderkinley dorjeeNo ratings yet
- Consolidation (2) - 4th SEMDocument3 pagesConsolidation (2) - 4th SEMDipankar NathNo ratings yet
- Global Warming: Causes, Effects and Solutions: August 2015Document8 pagesGlobal Warming: Causes, Effects and Solutions: August 2015Krishna BoreddyNo ratings yet
- 5 XerophtalmiaDocument36 pages5 XerophtalmiaMarshet GeteNo ratings yet
- Clanbook Tremere (Revised Edition) (2000) WW2357 (With Bookmarks) (OEF)Document107 pagesClanbook Tremere (Revised Edition) (2000) WW2357 (With Bookmarks) (OEF)cwod100% (1)
- Do Dice Play GodDocument6 pagesDo Dice Play Godninafatima allamNo ratings yet
- SupernaturalismDocument9 pagesSupernaturalismBack upNo ratings yet
- Types of Open ChannelsDocument1 pageTypes of Open ChannelsChaudhary Rahul SinghNo ratings yet
- PID Standard SymbolsDocument11 pagesPID Standard SymbolsSomeshNo ratings yet
- Unit 14 Design of Slender ColumnsDocument32 pagesUnit 14 Design of Slender ColumnsSh Jvon Sh JvonNo ratings yet
- Grade 5 DLL SCIENCE 5 Q3 Week 10Document4 pagesGrade 5 DLL SCIENCE 5 Q3 Week 10Leonardo Bruno Jr100% (4)
- Fertilizacion Nitrogenada en Maiz Basada en Materia Organica (Sanchez Roldan)Document33 pagesFertilizacion Nitrogenada en Maiz Basada en Materia Organica (Sanchez Roldan)Brian RamosNo ratings yet
- Celestia User's GuideDocument47 pagesCelestia User's GuideFay Lalitya ArdiNo ratings yet
- Important Intial McqsDocument34 pagesImportant Intial Mcqslover boyNo ratings yet
- Unit I Synchronous Reluctance MotorsDocument10 pagesUnit I Synchronous Reluctance MotorsLaxmikant BagaleNo ratings yet
- Countrys ClimateDocument20 pagesCountrys ClimateErika Jayne100% (1)
- Grade 3.strawberry Time - Posttest.silentDocument3 pagesGrade 3.strawberry Time - Posttest.silentJean Claudine Manday100% (1)
- MCQ's of Industrial Hydraulics & Pneumatics Laboratory: B. One DirectionDocument3 pagesMCQ's of Industrial Hydraulics & Pneumatics Laboratory: B. One Directionyuvarajballal100% (4)
- NTN TR73 en P014Document6 pagesNTN TR73 en P014harshal161987No ratings yet
- All Tables - Chapter 2 - WL - 77 To 188Document112 pagesAll Tables - Chapter 2 - WL - 77 To 188sdasorisaNo ratings yet