Download as pptx, pdf, or txt
You might also like
- CCW - Micro800 Is Locked by UserDocument1 pageCCW - Micro800 Is Locked by UserShailesh BangaleNo ratings yet
- Wall Follower Robot - PresentationDocument16 pagesWall Follower Robot - PresentationLalitMohanPandeyNo ratings yet
- Search Engine Marketing Course Material 2t4d9Document165 pagesSearch Engine Marketing Course Material 2t4d9Yoga Guru100% (3)
- Zyxel Cli CommandsDocument388 pagesZyxel Cli CommandswwwglroNo ratings yet
- Interrupt Driven IoDocument15 pagesInterrupt Driven IoMunie RosnanNo ratings yet
- Smart Car Parking SystemDocument17 pagesSmart Car Parking SystemsushmaNo ratings yet
- Smart Home With Google Assistant & Alexa Using NodeMCU ESP8266 - IotCircuitHubDocument19 pagesSmart Home With Google Assistant & Alexa Using NodeMCU ESP8266 - IotCircuitHubrudrathehacker9164No ratings yet
- PIC MicrocontrollerDocument26 pagesPIC MicrocontrollerK.R.Raguram100% (1)
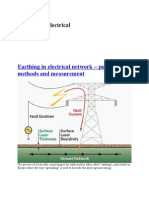
- Earthing in Electrical Network - Purpose, Methods and MeasurementDocument12 pagesEarthing in Electrical Network - Purpose, Methods and MeasurementShah JayNo ratings yet
- Chapter One: Smart City SolutionsDocument27 pagesChapter One: Smart City Solutionssnehal sabnisNo ratings yet
- Ultrasonic Navigation For Blind With Audio Interface DocumentationDocument55 pagesUltrasonic Navigation For Blind With Audio Interface DocumentationGoutham Raj Mode60% (5)
- Smart Helmet For Bike Rider Safety Final PPT Copy 2Document15 pagesSmart Helmet For Bike Rider Safety Final PPT Copy 2Ashish PandeyNo ratings yet
- Car Parking UuDocument20 pagesCar Parking UuRakibul HassanNo ratings yet
- Iot Based Solar Power Monitoring System Using Esp8266Document2 pagesIot Based Solar Power Monitoring System Using Esp8266mariyappanNo ratings yet
- Automatic Ration Distribution by Using Raspberry PiDocument5 pagesAutomatic Ration Distribution by Using Raspberry PiIJIRSTNo ratings yet
- ESP32 CAM Based Surveillance Robot Using Arduino IDEDocument52 pagesESP32 CAM Based Surveillance Robot Using Arduino IDEjulio hdtNo ratings yet
- Smart Assistive Shoes and Cane To Guide Visually Challenged Persons Using Arduino MicrocontrollerDocument50 pagesSmart Assistive Shoes and Cane To Guide Visually Challenged Persons Using Arduino MicrocontrollerSandèép YadavNo ratings yet
- Iot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument17 pagesIot Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaakashlogicNo ratings yet
- 4road Damage DetectionDocument46 pages4road Damage DetectionAjit RajNo ratings yet
- 8051 PRJDocument25 pages8051 PRJParthNo ratings yet
- Obstacle Avoidance Robot ReportDocument28 pagesObstacle Avoidance Robot ReportFadzrul Faiz100% (1)
- "IOT Based Water Pollution Monitoring RC Boat": Prepared byDocument21 pages"IOT Based Water Pollution Monitoring RC Boat": Prepared byMiracle AlignerNo ratings yet
- Smart Road Safety and Vehicle Accident Prevention System For Mountain RoadsDocument3 pagesSmart Road Safety and Vehicle Accident Prevention System For Mountain RoadsIsraelPerezSanchezNo ratings yet
- Microcontroller Based Radar SystemDocument19 pagesMicrocontroller Based Radar SystemMeet MakwanaNo ratings yet
- Report (Automatic Car Parking System) - SUMIT SARODEDocument23 pagesReport (Automatic Car Parking System) - SUMIT SARODESumit SarodeNo ratings yet
- Title in Caps (Font Size 16) : Visvesvaraya Technological University, BelagaviDocument11 pagesTitle in Caps (Font Size 16) : Visvesvaraya Technological University, Belagavidarshan kuppaswamyNo ratings yet
- Pce Mini Project Report: "RF Transmitter and Receiver"Document9 pagesPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiNo ratings yet
- Vi Sem: Mini - Project (18eemp68) : "Automatic Door Opener Using IR Sensor"Document15 pagesVi Sem: Mini - Project (18eemp68) : "Automatic Door Opener Using IR Sensor"SuprithaNo ratings yet
- EMBEDDED PPTDocument23 pagesEMBEDDED PPTArun Kumar MANo ratings yet
- SMART HELMET - PPTDocument10 pagesSMART HELMET - PPTgigatekNo ratings yet
- Smart OTP Based Wireless Locking SystemDocument6 pagesSmart OTP Based Wireless Locking SystemIJRASETPublicationsNo ratings yet
- RF Based Bus Stop Announcement SystemDocument43 pagesRF Based Bus Stop Announcement SystemSaravanan Viswakarma100% (1)
- Distance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportDocument10 pagesDistance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportHassan AliNo ratings yet
- Obstacle Avoiding Robot ReportDocument32 pagesObstacle Avoiding Robot ReportBro100% (1)
- Suresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementDocument12 pagesSuresh Angadi Education Foundation'S Angadi Institute of Technology and ManagementakshataNo ratings yet
- Mini Project Report MONIKADocument24 pagesMini Project Report MONIKAu creatorNo ratings yet
- Zigbee PresentationDocument15 pagesZigbee PresentationAbhishek PattanaikNo ratings yet
- Seminar Report On The Bionic HandDocument26 pagesSeminar Report On The Bionic HandNishanth B KNo ratings yet
- AI-Powered Smart Glasses For Blind Deaf and DumbDocument6 pagesAI-Powered Smart Glasses For Blind Deaf and DumbMuhammad Huzaifa AmjadNo ratings yet
- Mini Project Anti Sleep Alarm Report..Document14 pagesMini Project Anti Sleep Alarm Report..Jai chiNo ratings yet
- SMart CHarging (1) - MergedDocument79 pagesSMart CHarging (1) - Mergedmahanteshamantu222No ratings yet
- Fire Fighting Robot: Presented byDocument19 pagesFire Fighting Robot: Presented byAws Faeq100% (1)
- A Project On Question Paper Protection BoxDocument20 pagesA Project On Question Paper Protection BoxsayemNo ratings yet
- Robotics Programs PDFDocument19 pagesRobotics Programs PDFLata SinhaNo ratings yet
- Parallel Prefix Adders-Project ReportDocument23 pagesParallel Prefix Adders-Project Reports akhilaNo ratings yet
- Design and Implementation of Pothole Detector Usingmultisensor System PDFDocument5 pagesDesign and Implementation of Pothole Detector Usingmultisensor System PDFChethan GowdaNo ratings yet
- 2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDFDocument18 pages2B Mini Project Report 22-23 Arduino Based Tachometer 4 PDF10SHARMA SUMIT RAMADHINNo ratings yet
- Smart Monitoring of The Train and Train Tracks To Prevent Railway HazardsDocument25 pagesSmart Monitoring of The Train and Train Tracks To Prevent Railway HazardsviswaNo ratings yet
- ROBOTICS PRACTICAL FILE AURDINO 7 TinkercadDocument18 pagesROBOTICS PRACTICAL FILE AURDINO 7 TinkercadJp SinghNo ratings yet
- Silkworm Growth Monitoring Smart Sericulture System Based On Internet of Things and Image ProcessingDocument21 pagesSilkworm Growth Monitoring Smart Sericulture System Based On Internet of Things and Image Processingvrashikesh patilNo ratings yet
- Iot Based Smart Energy Meter Monitoring, Theft Detection and DisconnectionDocument6 pagesIot Based Smart Energy Meter Monitoring, Theft Detection and DisconnectionNkK SarMa100% (1)
- Microwave Oven 1Document20 pagesMicrowave Oven 1Praveen J LNo ratings yet
- Alcohol Detection System in CarsDocument12 pagesAlcohol Detection System in CarsRat.T67% (3)
- Smart Chair SystemDocument10 pagesSmart Chair SystemyashNo ratings yet
- Driver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byDocument18 pagesDriver'S Drowsiness Detection System: Bachelor of Technology in Computer Science and Engineering byShanker Yadav0% (1)
- Vehical Anti Collision SystemDocument12 pagesVehical Anti Collision SystemAjithBN100% (1)
- Abstract Automated BellDocument3 pagesAbstract Automated BellSreejith SunilNo ratings yet
- University of Engineering and Technology Lahore: Voice Control Robot & Obstacle Avoidance ProjectDocument9 pagesUniversity of Engineering and Technology Lahore: Voice Control Robot & Obstacle Avoidance ProjecttalhaNo ratings yet
- Project On Drowsiness Detection SystemDocument11 pagesProject On Drowsiness Detection SystemMeghana LNo ratings yet
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- Chapter 7,8,9,10Document16 pagesChapter 7,8,9,10Amruta AvhaleNo ratings yet
- Radar For Object DetectionDocument12 pagesRadar For Object DetectionGUGULOTHU VENKATESH PRASAD B182380No ratings yet
- AiS Final ExamDocument7 pagesAiS Final Examjerald james montgomeryNo ratings yet
- XMPlay Bass 2.4Document4 pagesXMPlay Bass 2.4istoyesNo ratings yet
- Understanding The Universal Journal in Sap S/4HanaDocument2 pagesUnderstanding The Universal Journal in Sap S/4HanaAmol ppNo ratings yet
- Supplier CASE STUDYDocument3 pagesSupplier CASE STUDYBurugolla Ravi0% (1)
- Application Note: The Protection of USB 2.0 ApplicationsDocument11 pagesApplication Note: The Protection of USB 2.0 ApplicationsamitNo ratings yet
- Sop For H3i Nefpa Simo To Mimo 521 - v1.0 - 20180314Document12 pagesSop For H3i Nefpa Simo To Mimo 521 - v1.0 - 20180314Aril GozaliNo ratings yet
- DSA Assignment 1Document15 pagesDSA Assignment 1PSNo ratings yet
- Asus Teresa r1.1 SchematicsDocument58 pagesAsus Teresa r1.1 SchematicsАнтон ФедоровNo ratings yet
- A231118 Update PDFDocument4 pagesA231118 Update PDFJOHNNY5377No ratings yet
- Digigram VX222v2 BrochureDocument2 pagesDigigram VX222v2 BrochureDr. Emmett Lathrop "Doc" BrownNo ratings yet
- 1.1. 2020-Final-PF HYBRID 22-02-2021Document11 pages1.1. 2020-Final-PF HYBRID 22-02-2021Syed ArezNo ratings yet
- Hvac Using Pdms Vol1Document99 pagesHvac Using Pdms Vol1uragunbagaNo ratings yet
- Putaway Strategy Part 2Document29 pagesPutaway Strategy Part 2SayliKarnikNo ratings yet
- Website LinksDocument3 pagesWebsite LinksSebastian Cano CampuzanoNo ratings yet
- Brava Webtop BestPracticesReadmeDocument31 pagesBrava Webtop BestPracticesReadmeabctester2552100% (1)
- STG8000Document73 pagesSTG8000Lucas PereiraNo ratings yet
- A Practical FileDocument8 pagesA Practical FileShailendra SharmaNo ratings yet
- Step-By-Step Manual For Training Certificates of TVIs TTisDocument10 pagesStep-By-Step Manual For Training Certificates of TVIs TTisLorenz ISTANo ratings yet
- 7502.9042 MANUAL KONE MAC DOB Rev 2 0 PDFDocument51 pages7502.9042 MANUAL KONE MAC DOB Rev 2 0 PDFwalidNo ratings yet
- USB Bluetooth Audio Transmitter: User ManualDocument8 pagesUSB Bluetooth Audio Transmitter: User ManualHimawan SandhiNo ratings yet
- Programmable Array Logic - Wikipedia, The Free EncyclopediaDocument7 pagesProgrammable Array Logic - Wikipedia, The Free EncyclopediaSuneelkrishna RallabhandiNo ratings yet
- Tutorial 2.2 - 19.11.2021 (ELAB3013)Document7 pagesTutorial 2.2 - 19.11.2021 (ELAB3013)Tengku Aiman100% (1)
- Automation Studio 6 PDFDocument32 pagesAutomation Studio 6 PDFgabriel122050% (4)
- CF-19 BIOS Update ManualDocument3 pagesCF-19 BIOS Update ManualAnonymous V9fdC6No ratings yet
- Panaview™: SensingDocument40 pagesPanaview™: SensingSergio RiveraNo ratings yet
- Row Selection of ALV GridDocument6 pagesRow Selection of ALV Gridhjheredias1No ratings yet