Download as pptx, pdf, or txt
You might also like
- Technical Manual MEP-006aDocument325 pagesTechnical Manual MEP-006amilhouse68100% (2)
- AH-type Instruction ManualDocument39 pagesAH-type Instruction Manualcraponzel100% (1)
- Dynamics SolutionsDocument197 pagesDynamics SolutionsHsu Yi-hsuanNo ratings yet
- 4 WarmupDocument9 pages4 WarmupkrishaNo ratings yet
- Exercises From Linear Algebra, Signal Processing, and Wavelets. A Unified Approach. Python VersionDocument71 pagesExercises From Linear Algebra, Signal Processing, and Wavelets. A Unified Approach. Python VersionAfsaneh ShakeriNo ratings yet
- Goldstein 18 21 13 14 20Document15 pagesGoldstein 18 21 13 14 20Abdul Shakoor ButtNo ratings yet
- Exercises From Linear Algebra, Signal Processing, and Wavelets. A Unified Approach. MATLAB VersionDocument71 pagesExercises From Linear Algebra, Signal Processing, and Wavelets. A Unified Approach. MATLAB VersionAfsaneh ShakeriNo ratings yet
- Gas Sampling System ManualDocument85 pagesGas Sampling System Manualalexander67% (3)
- Space Propulsion ValvesDocument8 pagesSpace Propulsion ValvesPrasannaNo ratings yet
- Exam MSSM 2009-07-07 SolutionDocument9 pagesExam MSSM 2009-07-07 SolutionBomber KillerNo ratings yet
- Mit Double PedulumDocument13 pagesMit Double PedulumAntoineNo ratings yet
- Laplace TransformDocument12 pagesLaplace Transformedgar100% (1)
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 pagesFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesNo ratings yet
- Carbone PendulumDocument6 pagesCarbone PendulumAdemar Alves TrindadeNo ratings yet
- Code Rev 2Document3 pagesCode Rev 2Sheikh RobinNo ratings yet
- Beat Phenomenon - Vibration - Sys. Analys.Document5 pagesBeat Phenomenon - Vibration - Sys. Analys.Miguel CervantesNo ratings yet
- Wavelets: 1. A Brief Summary 2. Vanishing Moments 3. 2d-Wavelets 4. Compression 5. De-NoisingDocument24 pagesWavelets: 1. A Brief Summary 2. Vanishing Moments 3. 2d-Wavelets 4. Compression 5. De-Noisingac.diogo487No ratings yet
- Chem 373 - Lecture 21: Term Symbols-IDocument23 pagesChem 373 - Lecture 21: Term Symbols-INuansak3No ratings yet
- Lecture2 Ent281 Chapter 1 (Part2)Document40 pagesLecture2 Ent281 Chapter 1 (Part2)YipNo ratings yet
- Molecular Dynamics Simulations: Che 520 Fall 2009Document8 pagesMolecular Dynamics Simulations: Che 520 Fall 2009Fabio OkamotoNo ratings yet
- Course 18.327 and 1.130 Wavelets and Filter BanksDocument13 pagesCourse 18.327 and 1.130 Wavelets and Filter Banksdjoseph_1No ratings yet
- Integral Table April 2012Document62 pagesIntegral Table April 2012colin morganNo ratings yet
- Lagrangian and Hamiltonian DynamicsDocument53 pagesLagrangian and Hamiltonian DynamicsumerilyasNo ratings yet
- 1) Give The Amplitude, Frequency, and Period of Oscillation For The Signal Illustrated in Figure P1.1Document8 pages1) Give The Amplitude, Frequency, and Period of Oscillation For The Signal Illustrated in Figure P1.1Ahmed Abdulbary AL-QarmNo ratings yet
- Matlab Tutorial 1Document29 pagesMatlab Tutorial 1KuAdenan KuSyakranNo ratings yet
- Lab # 1 Plotting of Basic SignalsDocument9 pagesLab # 1 Plotting of Basic SignalsAasim07No ratings yet
- Lecture 04 - Signal Space Approach and Gram Schmidt ProcedureDocument20 pagesLecture 04 - Signal Space Approach and Gram Schmidt ProcedureKhoa PhamNo ratings yet
- Chapter 5-Laplace TransformDocument27 pagesChapter 5-Laplace TransformKhairul AmirinNo ratings yet
- Brachistochrone Problem and It's Real-Life Application On ArchitectureDocument19 pagesBrachistochrone Problem and It's Real-Life Application On ArchitectureKhola KhanNo ratings yet
- Laplace BookDocument51 pagesLaplace BookAjankya SinghaniaNo ratings yet
- Problem Solving Session 10 Simple Harmonic Oscillator SolutionsDocument7 pagesProblem Solving Session 10 Simple Harmonic Oscillator SolutionsNitish Sagar PirtheeNo ratings yet
- Penyelesaian Numerik:: - Rhunge Kutta - Milne - Prediction - CorretionDocument6 pagesPenyelesaian Numerik:: - Rhunge Kutta - Milne - Prediction - CorretionNia Adha RyantieNo ratings yet
- Numerical Methods For Differential Equations: Euler MethodDocument27 pagesNumerical Methods For Differential Equations: Euler Methodmicky kololuNo ratings yet
- Module 2Document5 pagesModule 2Sumukh KiniNo ratings yet
- Fourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Document4 pagesFourier Transform: (1, 0) (0, 1) (X, Y) X (1, 0) + y (0, 1)Fadi Awni EleiwiNo ratings yet
- Some Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Document11 pagesSome Algorthim For Solving System of Linear Volterra Integral Equation of Second Kind by Using MATLAB 7Carolina RibeiroNo ratings yet
- Preguntas Resueltas PDFDocument46 pagesPreguntas Resueltas PDFJustin BullockNo ratings yet
- Pend PDFDocument4 pagesPend PDFVivek GodanNo ratings yet
- Mid Fall 2005Document4 pagesMid Fall 2005Shweta SridharNo ratings yet
- Solution - Dynamics of StructuresDocument7 pagesSolution - Dynamics of StructuresSocialR RecherchesNo ratings yet
- SIM1003 Chapter 12 NotesDocument5 pagesSIM1003 Chapter 12 NotesMin Hui LeeNo ratings yet
- 344-Article Text-1317-2-10-20220621Document26 pages344-Article Text-1317-2-10-20220621Kayiin NanaNo ratings yet
- Final 07 SolDocument4 pagesFinal 07 SolMuhammad YudhistiraNo ratings yet
- Wwwwrtyyu FGDHDocument25 pagesWwwwrtyyu FGDHSaad KhNo ratings yet
- Chapter 6Document3 pagesChapter 6inesboumaiza293No ratings yet
- Classical Mechanics Notes Variational Principles and Lagrange EquationsDocument11 pagesClassical Mechanics Notes Variational Principles and Lagrange EquationsBrennan MaceNo ratings yet
- Exercises of Small OscillationsDocument7 pagesExercises of Small Oscillationscocomluis135790No ratings yet
- Multivariable Feedback Control: Andrea GuidiDocument13 pagesMultivariable Feedback Control: Andrea GuidiAndrea GuidiNo ratings yet
- Bardaro 2012Document17 pagesBardaro 2012beharNo ratings yet
- Mekanika Benda TegarDocument4 pagesMekanika Benda TegarAhmad PohanNo ratings yet
- Signal Sapce RepresentationDocument41 pagesSignal Sapce RepresentationHarshitPalNo ratings yet
- LAB10 - SimpleHarmonicMotion - 1Document3 pagesLAB10 - SimpleHarmonicMotion - 1Lucy fNo ratings yet
- Beginner Matlab ODEDocument27 pagesBeginner Matlab ODEKen IkedaNo ratings yet
- Slides FullDocument324 pagesSlides FullTrần Việt HằngNo ratings yet
- 6 Dirac Notation: M N M NDocument18 pages6 Dirac Notation: M N M NMiranda HéctorNo ratings yet
- Derivatives and Integrals of Vector FunctionsDocument6 pagesDerivatives and Integrals of Vector FunctionsJoelNo ratings yet
- Double Pendulum: PHY 306 Project ReportDocument8 pagesDouble Pendulum: PHY 306 Project ReportYash TandonNo ratings yet
- Double Pendulum: PHY 306 Project ReportDocument8 pagesDouble Pendulum: PHY 306 Project ReportHamza HayatNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Ahmed Elnema's ResumeDocument2 pagesAhmed Elnema's ResumeAhmed ElnemaNo ratings yet
- Manual Giw LsaDocument37 pagesManual Giw LsaEdgar HuamanNo ratings yet
- Valvula 7444Document1 pageValvula 7444MantenimientoNo ratings yet
- Adolfo Mario Cantillo Garcia: MechanicDocument2 pagesAdolfo Mario Cantillo Garcia: MechanicAdo CantilloNo ratings yet
- FC 4.1.15 - Vibrator Soil Compactor Checklist FormDocument2 pagesFC 4.1.15 - Vibrator Soil Compactor Checklist FormJosef Demner Tiu PaspeNo ratings yet
- Calorific Value of Fuel Using Junker S Gas CalorimeterDocument12 pagesCalorific Value of Fuel Using Junker S Gas Calorimeterjishnu50% (2)
- Around The World by Stirling EngineDocument172 pagesAround The World by Stirling EngineGonzalo LaurieNo ratings yet
- 3-5400 GB PDFDocument16 pages3-5400 GB PDFShijumon KpNo ratings yet
- SteelDocument9 pagesSteelMohammedAlasaadNo ratings yet
- Structural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesDocument28 pagesStructural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesZahid RahmanNo ratings yet
- Api 571 Parte 12Document14 pagesApi 571 Parte 12Obe Mendoza100% (2)
- Thermodynamic Analysis of A Novel Ejector Enhanced Vaporcompression Refrigeration (EEVCR) CycleDocument14 pagesThermodynamic Analysis of A Novel Ejector Enhanced Vaporcompression Refrigeration (EEVCR) Cyclembt2004No ratings yet
- Distillation Column DesignDocument46 pagesDistillation Column DesignAhmed HassanNo ratings yet
- Finishing Accessories: High Quality Enhancements For Graco Finishing SystemsDocument92 pagesFinishing Accessories: High Quality Enhancements For Graco Finishing SystemsRobNo ratings yet
- Tyre Type COUPLINGDocument1 pageTyre Type COUPLINGdkspplNo ratings yet
- S&T Stainless CatalogueDocument66 pagesS&T Stainless CatalogueAnonymous jbvNLNANLINo ratings yet
- Garlock Hi TempDocument4 pagesGarlock Hi Temprock starNo ratings yet
- Report of Biologically Inspired Design of Robotic FishDocument34 pagesReport of Biologically Inspired Design of Robotic FishArvind KumarNo ratings yet
- Design of Moment Connection Extended End Plate Moment Connection - Eight Bolts TypeDocument2 pagesDesign of Moment Connection Extended End Plate Moment Connection - Eight Bolts TypeMazenMowafyNo ratings yet
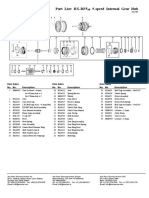
- Part List: RX-RF5 5-Speed Internal Gear HubDocument2 pagesPart List: RX-RF5 5-Speed Internal Gear HubTomislav KoprekNo ratings yet
- Fiat Kobelko Ex135 Shop ManualDocument20 pagesFiat Kobelko Ex135 Shop Manualkaren100% (54)
- Type SDS SDML SDXL Rotary Slip Cut SheetDocument2 pagesType SDS SDML SDXL Rotary Slip Cut SheetJose Barrero100% (1)
- Instruction Sheet: Description: Motor Conversion KitDocument4 pagesInstruction Sheet: Description: Motor Conversion KitrpizanaNo ratings yet
- 20X6 Static Rinser: Powerscreen Parts Manual Version 02eg FROM S/N PID00010C76D05004Document59 pages20X6 Static Rinser: Powerscreen Parts Manual Version 02eg FROM S/N PID00010C76D05004Andrey L'vovNo ratings yet
- IgorPioroRomneyDuffey HeatTransferandHydraulicResistanceatSupercriticalPressuresinPowerEngineeringApplications ASMEPress2007 PDFDocument361 pagesIgorPioroRomneyDuffey HeatTransferandHydraulicResistanceatSupercriticalPressuresinPowerEngineeringApplications ASMEPress2007 PDFAbhishek DubeyNo ratings yet
- CFD Csa A23.3 14 PDFDocument89 pagesCFD Csa A23.3 14 PDFSumanth67% (3)