Download as pptx, pdf, or txt
You might also like
- PANASONICDocument2 pagesPANASONICJosue Hernandez Gutierrez100% (1)
- 1multiprocessors and Multicomputers: A. Multiprocessor System InterconnectsDocument16 pages1multiprocessors and Multicomputers: A. Multiprocessor System InterconnectsUdupiSri groupNo ratings yet
- Lecture 5Document72 pagesLecture 5Lets clear Jee mathsNo ratings yet
- Multiprocessor Architecture and ProgrammingDocument20 pagesMultiprocessor Architecture and Programmingவெ. விஷ்வாNo ratings yet
- Unit 1Document25 pagesUnit 1rishisharma4201No ratings yet
- Parallel Programming Platforms (Part 1) : CSE3057Y Parallel and Distributed SystemsDocument38 pagesParallel Programming Platforms (Part 1) : CSE3057Y Parallel and Distributed SystemssplokbovNo ratings yet
- Lecture 4 Network Topologies For Parallel ArchitectureDocument34 pagesLecture 4 Network Topologies For Parallel Architecturenimranoor137No ratings yet
- CSA Mod-3Document39 pagesCSA Mod-3Pallavi BhartiNo ratings yet
- Final Unit5 CO NotesDocument7 pagesFinal Unit5 CO NotesMohd Ismail GourNo ratings yet
- Network HardwareDocument32 pagesNetwork HardwareImran Bashir MinhasNo ratings yet
- A Scalable, Commodity Data Center Network ArchitectureDocument30 pagesA Scalable, Commodity Data Center Network ArchitectureAamir AliNo ratings yet
- CSCI 8150 Advanced Computer ArchitectureDocument28 pagesCSCI 8150 Advanced Computer Architecturesunnynnus100% (2)
- CO2202 L13 MultiProcessorDocument31 pagesCO2202 L13 MultiProcessorvidsa2002No ratings yet
- ACFrOgBUHfSs5JJq8qhMAidgxGlhI1PVhDENxJ5Nvvf40LLrXAfXbAyXJvb16wu0NpVGnPnIEmvas8EAzCMG6hBW3FrQm4u33xPLThfDWODff8 jHUC-N9Jgo3XEpPc PDFDocument76 pagesACFrOgBUHfSs5JJq8qhMAidgxGlhI1PVhDENxJ5Nvvf40LLrXAfXbAyXJvb16wu0NpVGnPnIEmvas8EAzCMG6hBW3FrQm4u33xPLThfDWODff8 jHUC-N9Jgo3XEpPc PDFshifa khanNo ratings yet
- Switched Communication NetworksDocument37 pagesSwitched Communication Networksk gouthamNo ratings yet
- Organizational StructureDocument3 pagesOrganizational StructureProsper WambongNo ratings yet
- Presentation For Major ProjectDocument28 pagesPresentation For Major ProjectJinal DhobiNo ratings yet
- CCNA3 Chapter 1 Practice Test Answers: DistributionDocument41 pagesCCNA3 Chapter 1 Practice Test Answers: Distributionagurl100% (1)
- Introduction To Networking Devices-1Document25 pagesIntroduction To Networking Devices-1Tolosa TafeseNo ratings yet
- Unit 15 Bus StructureDocument32 pagesUnit 15 Bus StructureRennie KawanguNo ratings yet
- ACA Mod4Document61 pagesACA Mod4Bharath N ReddyNo ratings yet
- S 8 Mod 1Document33 pagesS 8 Mod 1sheenaneesNo ratings yet
- My Lecture 2Document14 pagesMy Lecture 2Kashif KhanNo ratings yet
- Unit-1.7 Transmission Media Network DeviceDocument15 pagesUnit-1.7 Transmission Media Network Devicebffs814No ratings yet
- OSI ModelDocument19 pagesOSI ModelV VizNo ratings yet
- Networking DevicesDocument20 pagesNetworking DevicesKothai PriyaNo ratings yet
- Interconnection NetworkDocument5 pagesInterconnection Networkpoulomi santraNo ratings yet
- Unit2 2 090714220525 Phpapp02Document61 pagesUnit2 2 090714220525 Phpapp02Naveen Kumar YadavNo ratings yet
- DOS LecturesDocument116 pagesDOS Lecturesankit.singh.47No ratings yet
- ACA Mod 3Document45 pagesACA Mod 3avi003No ratings yet
- Intra-Organizational Electronic Commerce: Chapter 12: Appendix By: Anna Janinah E. RamosDocument34 pagesIntra-Organizational Electronic Commerce: Chapter 12: Appendix By: Anna Janinah E. RamosAnna JaninahNo ratings yet
- Regulation - 2018 (CBCS Scheme) 18CS733-Advanced Computer ArchitectureDocument48 pagesRegulation - 2018 (CBCS Scheme) 18CS733-Advanced Computer ArchitectureBharath N Reddy100% (1)
- Switching SystemDocument49 pagesSwitching SystemjansarveshNo ratings yet
- Lecture 3 - 3 Evaluating Static Interconnection NetworksDocument41 pagesLecture 3 - 3 Evaluating Static Interconnection NetworkswmanjonjoNo ratings yet
- Lec 15, 16Document19 pagesLec 15, 16Atif MahmoodNo ratings yet
- Chap2 Slides Week3Document28 pagesChap2 Slides Week3A NNo ratings yet
- The Hierarchical Network ModelDocument6 pagesThe Hierarchical Network ModelMouhamad BazziNo ratings yet
- Introduction of NetworkingDocument113 pagesIntroduction of NetworkingDurgesh PuneNo ratings yet
- LAN Switching & Wireless NetworksDocument66 pagesLAN Switching & Wireless NetworksAbdullah AmmarNo ratings yet
- B.tech CS S8 High Performance Computing Module Notes Module 4Document33 pagesB.tech CS S8 High Performance Computing Module Notes Module 4Jisha ShajiNo ratings yet
- Interconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection StructureDocument22 pagesInterconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection Structuredomainname9No ratings yet
- Data Presentation 2Document20 pagesData Presentation 2cctmasekesaNo ratings yet
- Chapter 13 Energy-Efficient WSN SlidesDocument31 pagesChapter 13 Energy-Efficient WSN Slidesrizi007No ratings yet
- Cse 317 1 PDFDocument58 pagesCse 317 1 PDFJai Jagannath DasNo ratings yet
- Wireless Sensor NetworksDocument32 pagesWireless Sensor NetworksSumeet ChauhanNo ratings yet
- Distributed SystemDocument26 pagesDistributed SystemSMARTELLIGENT100% (1)
- UNIT 3-SwitchingDocument42 pagesUNIT 3-SwitchingBeghin BoseNo ratings yet
- Intranets and ExtranetsDocument78 pagesIntranets and ExtranetsEL MAMOUN ABDELLAHNo ratings yet
- Lecture 18 - 19 - Switching Cont. - Message SwitchingDocument28 pagesLecture 18 - 19 - Switching Cont. - Message SwitchingFia TerryNo ratings yet
- Chapter-7 Multiprocessors and Multicomputers: Module-IvDocument53 pagesChapter-7 Multiprocessors and Multicomputers: Module-IvGagana.k kNo ratings yet
- Multivibrators: The Generators of Rectangular WaveformsDocument20 pagesMultivibrators: The Generators of Rectangular Waveformsgeet_battaNo ratings yet
- Telecommunications and The InternetDocument29 pagesTelecommunications and The InternetRajib HassanNo ratings yet
- Unit-6 MultiprocessorsDocument21 pagesUnit-6 MultiprocessorsMandeepNo ratings yet
- Winter Semester 2023-24 - CSE3003 - ETH - AP2023246000860 - 2024-01-12 - Reference-Material-IDocument26 pagesWinter Semester 2023-24 - CSE3003 - ETH - AP2023246000860 - 2024-01-12 - Reference-Material-IVinit mehraNo ratings yet
- Lans, Wans, and InternetworksDocument31 pagesLans, Wans, and InternetworksHassan allaNo ratings yet
- Differentiate Tightly Coupled and Loosely Coupled SystemDocument12 pagesDifferentiate Tightly Coupled and Loosely Coupled SystemSathwika KistipatiNo ratings yet
- Ec 407 Computer CommunicationDocument97 pagesEc 407 Computer CommunicationJustin SajuNo ratings yet
- Switching and Routing: Samson A School of Electrical & Computer Engineering, Hawassa Institute of TechnologyDocument47 pagesSwitching and Routing: Samson A School of Electrical & Computer Engineering, Hawassa Institute of TechnologymigadNo ratings yet
- LO3 Develop Topology EditedDocument38 pagesLO3 Develop Topology Editedbiruk mollaNo ratings yet
- 5069 In011f en P PDFDocument12 pages5069 In011f en P PDFfaisalNo ratings yet
- Pae Transmitter Type t6t User GuideDocument75 pagesPae Transmitter Type t6t User Guidecmge_2005100% (1)
- AC Circuit Analysis - Series and Parallel RC and RLDocument8 pagesAC Circuit Analysis - Series and Parallel RC and RLPHẠM ĐỖ ĐỨC KHẢINo ratings yet
- Stun Pen Entrep 1Document15 pagesStun Pen Entrep 1PHOENA DE GUIANo ratings yet
- BJT2Document12 pagesBJT2swan1619No ratings yet
- R&S®Series4200 Software Defined Radios: VHF/UHF Radio Family For ATC CommunicationsDocument24 pagesR&S®Series4200 Software Defined Radios: VHF/UHF Radio Family For ATC CommunicationsDoan HoaNo ratings yet
- How To Program An IC Chip: Using The SUPERPRO 280UDocument10 pagesHow To Program An IC Chip: Using The SUPERPRO 280UArafath HashibNo ratings yet
- M4-Approved Vendor ListDocument20 pagesM4-Approved Vendor Listisan.structural TjsvgalavanNo ratings yet
- FX3S - Hardware Manual (2AD Type) JY997D51701-A (09.13)Document4 pagesFX3S - Hardware Manual (2AD Type) JY997D51701-A (09.13)Hanafi HariyantoNo ratings yet
- Iron Product Industries ReportDocument3 pagesIron Product Industries ReportanthonyNo ratings yet
- HVPNL 220 KV SubstationDocument5 pagesHVPNL 220 KV Substationa s khuranaNo ratings yet
- Symbion Power - Independent PowerDocument3 pagesSymbion Power - Independent PowerAllAfricaNo ratings yet
- Oxidation-Reduction Reactions (Electrochemistry) : The Material On These Slides Are Taken From (With Some Modifications)Document63 pagesOxidation-Reduction Reactions (Electrochemistry) : The Material On These Slides Are Taken From (With Some Modifications)Hendri KurniawanNo ratings yet
- Medidores Hipot DCDC HAEFELY - HD100-Series - SPECDocument2 pagesMedidores Hipot DCDC HAEFELY - HD100-Series - SPECArturo mendozaNo ratings yet
- Dr. Govindaraj Thangavel M.E., PH.D., F.I.EDocument19 pagesDr. Govindaraj Thangavel M.E., PH.D., F.I.EProfDrgovindarajthangavelNo ratings yet
- Pin Diagram of Ic 4033 PDFDocument6 pagesPin Diagram of Ic 4033 PDFdeepak_kr22781No ratings yet
- Akai Service Manual 14ct02,21cts25fs Ete-2Document31 pagesAkai Service Manual 14ct02,21cts25fs Ete-2DOBRODIY70100% (2)
- MODEL: OT3.3-12 NO.:: Industrial Battery - Vrla - Agm Battery - Small SeriesDocument2 pagesMODEL: OT3.3-12 NO.:: Industrial Battery - Vrla - Agm Battery - Small SeriesOrlando GómezNo ratings yet
- Connection Strain GaugeDocument2 pagesConnection Strain GaugeRavi RanjanNo ratings yet
- 8085 ArchitectureDocument17 pages8085 ArchitectureSamaira Shahnoor ParvinNo ratings yet
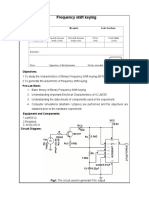
- Frequency Shift Keying: ObjectivesDocument3 pagesFrequency Shift Keying: ObjectivesSyam SundarNo ratings yet
- Maintenance Mitras LX 6xxxDocument8 pagesMaintenance Mitras LX 6xxxPerran TrevanNo ratings yet
- Solutions For Special Cases: Fig. 2.11 A+b: Fastening The Discharge Elbow or Foundation RailsDocument4 pagesSolutions For Special Cases: Fig. 2.11 A+b: Fastening The Discharge Elbow or Foundation RailsSohail HanifNo ratings yet
- Fagor CNC 8055 Operating Manual EnglishDocument246 pagesFagor CNC 8055 Operating Manual EnglishSureshNo ratings yet
- Wendy Johanna Moreno Diaz - Post TaskDocument13 pagesWendy Johanna Moreno Diaz - Post Taskwendy jhoanna moreno diazNo ratings yet
- ATL Equipment List 60 StudentsDocument16 pagesATL Equipment List 60 StudentsHumanityNo ratings yet
- Fujikura XFPMC 025KPRDocument4 pagesFujikura XFPMC 025KPRImran SayeedNo ratings yet
- Compensation of Power Transmission SystemsDocument29 pagesCompensation of Power Transmission Systemsbedilu77No ratings yet
- MEP Design Course EditedDocument18 pagesMEP Design Course Editedmohammedansin1No ratings yet