Download as ppt, pdf, or txt
You might also like
- Cambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Document375 pagesCambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Harini Bharani100% (8)
- 03 - AI - Week2Document60 pages03 - AI - Week2vikas kumar singhNo ratings yet
- Informed SearchDocument25 pagesInformed SearchPetter PNo ratings yet
- 4.heuristic Search-ModifiedDocument78 pages4.heuristic Search-ModifiedMd. Moshiur Rahman MugdhoNo ratings yet
- Unit-3-Heuristics Search TechniquesDocument81 pagesUnit-3-Heuristics Search TechniquesShaheen MondalNo ratings yet
- PPts On Heuristic SearchDocument21 pagesPPts On Heuristic SearchNIDHI SHARMANo ratings yet
- Heuristic SearchDocument79 pagesHeuristic Searchhingoranipiyush28No ratings yet
- Heuristc SearchDocument32 pagesHeuristc SearchBalwinder KaurNo ratings yet
- Lecture 7 and 8_Divide and conquer_Dynamic programmingDocument79 pagesLecture 7 and 8_Divide and conquer_Dynamic programmingclintsimiyu004No ratings yet
- Chapter Two - AlgoDocument41 pagesChapter Two - Algonuredinmaru5No ratings yet
- QuestionsDocument5 pagesQuestionshuzaifa mirzaNo ratings yet
- Chapitre 2Document80 pagesChapitre 2Chaima BelhediNo ratings yet
- Chapter2 Part2Document62 pagesChapter2 Part2Ra NiaNo ratings yet
- Uninformed Searching AIDocument58 pagesUninformed Searching AIPrakhar PathakNo ratings yet
- A Astrich AlgorithmDocument5 pagesA Astrich AlgorithmAmit TiwariNo ratings yet
- Uninformed Search AlgorithmsDocument58 pagesUninformed Search AlgorithmsAnkur GuptaNo ratings yet
- Unit 7Document19 pagesUnit 7Avinash shreyNo ratings yet
- Chapter 5 HeraguDocument28 pagesChapter 5 Heragusugar lollyNo ratings yet
- 1151WH4 Au23Document5 pages1151WH4 Au23HanaMJJNo ratings yet
- 8.hierarchical AGNES DIANADocument46 pages8.hierarchical AGNES DIANAShreyas ParajNo ratings yet
- ClusteringDocument84 pagesClusteringmanmeet singh tutejaNo ratings yet
- Artificial IntelligenceDocument50 pagesArtificial IntelligencePriya SinghNo ratings yet
- Chapter 3 - Part - 4Document21 pagesChapter 3 - Part - 4Osama Al AsoouliNo ratings yet
- Lecture 02 DaaDocument6 pagesLecture 02 DaaSwapnil Tiwari (SWA)No ratings yet
- L19 20 NetworkModelsDocument21 pagesL19 20 NetworkModelsHarsh KumarNo ratings yet
- 1 IntroductionDocument37 pages1 IntroductionMaxamed YuusufNo ratings yet
- Chapter Twenty: Cluster AnalysisDocument41 pagesChapter Twenty: Cluster AnalysisMeny ChaviraNo ratings yet
- Parallel Distributed Computing Unit-5Document65 pagesParallel Distributed Computing Unit-5sowmya srikandeNo ratings yet
- 2021R Ailab ManualDocument32 pages2021R Ailab ManualAJAY KRISHNANo ratings yet
- Derivative FormulaDocument8 pagesDerivative FormulaLaurence Blaire IonNo ratings yet
- 23-04-2021-1619172029-8-Ijamss-3. Ijamss - Group Divisible Designs Through Recoding of Varietal and Level CodesDocument10 pages23-04-2021-1619172029-8-Ijamss-3. Ijamss - Group Divisible Designs Through Recoding of Varietal and Level Codesiaset123No ratings yet
- Earching Lgorithms: (I, H F, B F, H C, B S)Document61 pagesEarching Lgorithms: (I, H F, B F, H C, B S)Prakhar PathakNo ratings yet
- Clustering Partitioning MethodsDocument20 pagesClustering Partitioning Methods2K19/BMBA/13 RITIKANo ratings yet
- Pam Clustering TechniqueDocument13 pagesPam Clustering TechniqueAnoyNo ratings yet
- AI Chapter 2Document34 pagesAI Chapter 2biruckNo ratings yet
- ClusterDocument20 pagesClustersondaravalliNo ratings yet
- ClusteringDocument45 pagesClusteringsujan.cseruNo ratings yet
- Blind (Uninformed) Search: Simple Problem-Solving-Agent Agent AlgorithmDocument11 pagesBlind (Uninformed) Search: Simple Problem-Solving-Agent Agent AlgorithmAnonymous ChASJ3eFsHNo ratings yet
- Artificial Intelligence WINTER 2021 SOLU.Document15 pagesArtificial Intelligence WINTER 2021 SOLU.VivekNo ratings yet
- All-Pairs Testing: All Pairs of Variables. This Significantly Reduces The Number of Tests That Must Be Created and RunDocument37 pagesAll-Pairs Testing: All Pairs of Variables. This Significantly Reduces The Number of Tests That Must Be Created and RunCristian MihaiNo ratings yet
- Lecture 3 - Herirachical MethodsDocument16 pagesLecture 3 - Herirachical MethodsManikandan MNo ratings yet
- Solving Problems by SearchingDocument71 pagesSolving Problems by SearchingMd. Moshiur Rahman MugdhoNo ratings yet
- Module5 - Outlier - Analysis: Reference: "Data Mining The Text Book", Charu C. Aggarwal, Springer, 2015. (Chapters 8)Document21 pagesModule5 - Outlier - Analysis: Reference: "Data Mining The Text Book", Charu C. Aggarwal, Springer, 2015. (Chapters 8)Rohith RohNo ratings yet
- 08 Lecture CSC462Document35 pages08 Lecture CSC462Sarmad RehanNo ratings yet
- 4.3 K-MedoidsDocument31 pages4.3 K-MedoidsPynshngainNo ratings yet
- Data StructuresDocument428 pagesData StructuresSara MaghsoudiNo ratings yet
- Stem and Leaf Plot WorksheetsDocument2 pagesStem and Leaf Plot Worksheetssindara.akanniNo ratings yet
- Model Answer DAADocument25 pagesModel Answer DAAjjkkNo ratings yet
- Mathematical Programming-II Merge SortDocument18 pagesMathematical Programming-II Merge Sortsyed hamzaNo ratings yet
- 33 93 LM V1 S1 - KmedoidsDocument3 pages33 93 LM V1 S1 - KmedoidsSk SahidullahNo ratings yet
- Divide-and-Conquer Analysis of Merge SortDocument20 pagesDivide-and-Conquer Analysis of Merge SortHamza HashmiNo ratings yet
- Activity Sheet - Statistics and Probability Lesson 2Document2 pagesActivity Sheet - Statistics and Probability Lesson 2marilou garciaNo ratings yet
- Activity Guide and Evaluation Rubric - Post-Task - Final Evaluation of The CourseDocument11 pagesActivity Guide and Evaluation Rubric - Post-Task - Final Evaluation of The CourseTavo UrdialexNo ratings yet
- Artificial IntelligenceDocument143 pagesArtificial IntelligenceBhuvaneshAngelsAngelsNo ratings yet
- Dynamic PDFDocument55 pagesDynamic PDFParamashanti Dewi EPNo ratings yet
- Tutorial 4: Deterministic Dynamic Programming: Universiti Tunku Abdul Rahman (Utar) UDPS 2133mathematical ProgrammingDocument4 pagesTutorial 4: Deterministic Dynamic Programming: Universiti Tunku Abdul Rahman (Utar) UDPS 2133mathematical ProgrammingceliomNo ratings yet
- Chapter 4 Data Managmnt Lesson 3 Measures of DispersionDocument9 pagesChapter 4 Data Managmnt Lesson 3 Measures of DispersionChristine CagaraNo ratings yet
- Lecture #2: Prediction, K-Nearest Neighbors: CS 109A, STAT 121A, AC 209A: Data ScienceDocument28 pagesLecture #2: Prediction, K-Nearest Neighbors: CS 109A, STAT 121A, AC 209A: Data ScienceLeonardo Lujan GonzalezNo ratings yet
- QAB - II - Lecture - Notes StatisticDocument101 pagesQAB - II - Lecture - Notes Statisticnyashadzashemoyo175No ratings yet
- Simulated AnnealingDocument21 pagesSimulated Annealingwohaja9323No ratings yet
- Multi-Objective Optimization using Artificial Intelligence TechniquesFrom EverandMulti-Objective Optimization using Artificial Intelligence TechniquesNo ratings yet
- Local Search Hill Climbing Genetic AlgoDocument52 pagesLocal Search Hill Climbing Genetic Algofunnyclups413No ratings yet
- 0 Adversial Search Min Max ALpha BetaDocument64 pages0 Adversial Search Min Max ALpha Betafunnyclups413No ratings yet
- DocScanner 09-Oct-2023 13-37Document22 pagesDocScanner 09-Oct-2023 13-37funnyclups413No ratings yet
- Uddav CoaDocument4 pagesUddav Coafunnyclups413No ratings yet
- R Data Visualization Cookbook Sample ChapterDocument25 pagesR Data Visualization Cookbook Sample ChapterPackt PublishingNo ratings yet
- 109is 37150 - 50310Document2 pages109is 37150 - 50310dip461No ratings yet
- CBT Body of Knowledge - Rev0Document7 pagesCBT Body of Knowledge - Rev0Partha Sarathi Sadhukhan0% (1)
- FFM1-Ch 2.1. Inventory ManagementDocument37 pagesFFM1-Ch 2.1. Inventory ManagementQuỳnhNo ratings yet
- Fleck SXT Timer: Service ManualDocument24 pagesFleck SXT Timer: Service ManualdracuojiNo ratings yet
- Korean WaveDocument12 pagesKorean WaveJm PogiNo ratings yet
- Superline & Implantium: Surgical / Prosthesis ManualDocument51 pagesSuperline & Implantium: Surgical / Prosthesis Manualk4ssdcNo ratings yet
- Solution Consultant and Project Manager Requirements For Authorizations & Recognized Expertise: Eligible CertificationsDocument19 pagesSolution Consultant and Project Manager Requirements For Authorizations & Recognized Expertise: Eligible CertificationsSuresh SuresettiNo ratings yet
- Levels of ProficiencyDocument13 pagesLevels of Proficiencyjizun geveroNo ratings yet
- Mitsubishi Triton BrochureDocument24 pagesMitsubishi Triton BrochureShahbazAhmadNo ratings yet
- 5S Implementation Manual Part 2Document63 pages5S Implementation Manual Part 2jgprasadNo ratings yet
- ENGLISH 9 DLP For DEMODocument9 pagesENGLISH 9 DLP For DEMOMary Joy Corpuz100% (2)
- Foreword Edgar Morin Path of Complexity - Alfonso MontuoriDocument32 pagesForeword Edgar Morin Path of Complexity - Alfonso MontuoriFrancisco LionNo ratings yet
- PR P3 DirtFish GAMER HandbookDocument9 pagesPR P3 DirtFish GAMER HandbookpeggyNo ratings yet
- ALMMDocument16 pagesALMMJigar PatelNo ratings yet
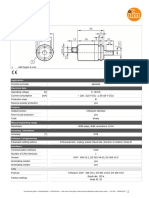
- Multiturn Solid Shaft Encoder: 1 M4 Depth 6 MMDocument2 pagesMultiturn Solid Shaft Encoder: 1 M4 Depth 6 MMSoha EzzaldenNo ratings yet
- Article WritingDocument10 pagesArticle WritingMosteroidNo ratings yet
- Passage 2 For Grade 6Document3 pagesPassage 2 For Grade 6Irish Joy CachaperoNo ratings yet
- TDB-E-CM 725-Technisches DatenblattDocument2 pagesTDB-E-CM 725-Technisches DatenblattNarimane Benty100% (1)
- VSD Training Nu Blu Data SheetDocument2 pagesVSD Training Nu Blu Data Sheetابرار عمرNo ratings yet
- DX DiagDocument35 pagesDX Diagdiddyaw150No ratings yet
- Amalgam Xray PorcelainDocument58 pagesAmalgam Xray PorcelainczarinaNo ratings yet
- Emerging 4Document41 pagesEmerging 4ebenezerteshe05No ratings yet
- SG250HX User+Manual V15 20201106Document78 pagesSG250HX User+Manual V15 20201106specopbookieNo ratings yet
- LF TIPS and Techniques-TOC PDFDocument8 pagesLF TIPS and Techniques-TOC PDFMariusz IdzikowskiNo ratings yet
- OM Chapter-1Document55 pagesOM Chapter-1TIZITAW MASRESHANo ratings yet
- Value Maximization, Stakeholder Theory, and The Corporate Objective FunctionDocument2 pagesValue Maximization, Stakeholder Theory, and The Corporate Objective FunctionramdaneNo ratings yet
- Sungrow-SG3 0RT-SG4 0RTDocument2 pagesSungrow-SG3 0RT-SG4 0RTchris dascalopoulosNo ratings yet
- First Conditional ChainDocument3 pagesFirst Conditional ChainSonia DivileNo ratings yet