
Ee50238 - NGC 12 - Efk
Ee50238 - NGC 12 - Efk
You might also like
- WIMMDocument27 pagesWIMMpartika13100% (2)
- MINTZBERGDocument32 pagesMINTZBERGgeezee10004464100% (2)
- 13 Japan Under The ShogunDocument22 pages13 Japan Under The Shogunapi-29949541290% (10)
- 155 - Flow Chart CV .8Document1 page155 - Flow Chart CV .8Mugywara luNo ratings yet
- JustiDocument1 pageJustiwesleyNo ratings yet
- PB - Stingblade 17.5 - BoliviaDocument1 pagePB - Stingblade 17.5 - BoliviapendexxNo ratings yet
- RX-16 - MRIL 6 inDocument15 pagesRX-16 - MRIL 6 inManu MohanNo ratings yet
- +xmer - Base Costing - 1PGDocument1 page+xmer - Base Costing - 1PGPaolo AfidchaoNo ratings yet
- Propeller Can Be Sized Within or Above The Speed Range ShownDocument3 pagesPropeller Can Be Sized Within or Above The Speed Range ShownadelsoNo ratings yet
- Screenshot 2023-07-04 at 6.15.49 PMDocument1 pageScreenshot 2023-07-04 at 6.15.49 PMAli md YounusNo ratings yet
- Pump House along-LINE PLANDocument1 pagePump House along-LINE PLANdanaokasho11No ratings yet
- 40 - Southern Cross - Iso Pump - 125 X 100 - 250 - 1200 3000 RPMDocument1 page40 - Southern Cross - Iso Pump - 125 X 100 - 250 - 1200 3000 RPMJAZZ KING PROJECTNo ratings yet
- Lecture 1 Introduction To CourseDocument20 pagesLecture 1 Introduction To CourseSudeep AryalNo ratings yet
- 2 - Power Vs RPMDocument12 pages2 - Power Vs RPMsudhanshu22kumar22No ratings yet
- MODULE Ib Variable Load ProblemDocument15 pagesMODULE Ib Variable Load ProblemRon Ely Dumo FloresNo ratings yet
- Tabla de Curvatura de BombaDocument2 pagesTabla de Curvatura de BombapochoNo ratings yet
- Numerical Analysis Notes: Plotting of Z F (X, Y) Contour-Lines With ExcelDocument9 pagesNumerical Analysis Notes: Plotting of Z F (X, Y) Contour-Lines With ExcelYemi AladejareNo ratings yet
- Civil Engineering Department CE475: Construction Methods Third 2023 Classwork 1Document2 pagesCivil Engineering Department CE475: Construction Methods Third 2023 Classwork 1cgc8bmxtgsNo ratings yet
- FB-77 Series (Spec)Document8 pagesFB-77 Series (Spec)tuanhnguyen2121990No ratings yet
- Link Tc0065 La Misa To Tc0057 Gloriabamba Proposal ReportDocument5 pagesLink Tc0065 La Misa To Tc0057 Gloriabamba Proposal ReportFrank aliaga berrocalNo ratings yet
- InRush Grupo 1 PantanilloDocument1 pageInRush Grupo 1 PantanilloCarlos MoralesNo ratings yet
- Parallel Pump Curves TA2538 X 4, 1760 RPM : L/Sec 200 300 400 500 600 700 800 900 1000 1100 1200Document1 pageParallel Pump Curves TA2538 X 4, 1760 RPM : L/Sec 200 300 400 500 600 700 800 900 1000 1100 1200Rubi AbionNo ratings yet
- Shelter and Tower Layout: Bts 1 Bts 2 PIUDocument1 pageShelter and Tower Layout: Bts 1 Bts 2 PIUshripalNo ratings yet
- Espec Tecnica MAN 440HP@1800 RPMDocument3 pagesEspec Tecnica MAN 440HP@1800 RPMjoroma58No ratings yet
- ARBU3 - Midterm Plate - BDocument3 pagesARBU3 - Midterm Plate - BMiah EchavesNo ratings yet
- T OpsDocument2 pagesT OpsJose CamposNo ratings yet
- Temporary Barracks Layout: Entry ExitDocument1 pageTemporary Barracks Layout: Entry ExitRenato PanganNo ratings yet
- Ejemplo Reporte Link Planner (RE)Document6 pagesEjemplo Reporte Link Planner (RE)Anderson NovaNo ratings yet
- Swimming Pool Finishing Details-Layout1-Abu Thakir PoolDocument1 pageSwimming Pool Finishing Details-Layout1-Abu Thakir Poolnithankarthik920No ratings yet
- CCTVDocument1 pageCCTVhanzel neonNo ratings yet
- Memomassa Ufu HorarioDocument1 pageMemomassa Ufu HorarioJoão Paulo Souza DiasNo ratings yet
- A123 20AH Data SheetDocument2 pagesA123 20AH Data SheetXavier ReibánNo ratings yet
- FR95017.01 Isb 6.7 230 HPDocument2 pagesFR95017.01 Isb 6.7 230 HPlancelotinternacionalsaNo ratings yet
- Wahh (Jog) - AdisutjiptoDocument13 pagesWahh (Jog) - Adisutjiptoreza100% (1)
- VisctronicDocument14 pagesVisctronicmigatitoxdNo ratings yet
- E1f 220V, 1ø, 2W+G E-1f 220V, 1ø, 2W+G E-Mp1 380y/220v, 3ø, 4W+G E-Mp2 380y/220v, 3ø, 4W+GDocument1 pageE1f 220V, 1ø, 2W+G E-1f 220V, 1ø, 2W+G E-Mp1 380y/220v, 3ø, 4W+G E-Mp2 380y/220v, 3ø, 4W+GAndy ArenasNo ratings yet
- CorrectionDocument1 pageCorrectionvikram soniNo ratings yet
- Sheet Pile-10kpa-400ton-Drained-Com1 - MODIFIED - AfDocument1 pageSheet Pile-10kpa-400ton-Drained-Com1 - MODIFIED - AfRasa RajaNo ratings yet
- Implementation of A State-Of-The-Art Cohesive Zone Ele-Ment For ANSYS MechanicalDocument4 pagesImplementation of A State-Of-The-Art Cohesive Zone Ele-Ment For ANSYS MechanicalL.a. MayorNo ratings yet
- Detail BatikDocument1 pageDetail Batikagus hwNo ratings yet
- 2 - Ground Floor Plan - Remarks - 2021228Document1 page2 - Ground Floor Plan - Remarks - 2021228majedNo ratings yet
- KTA 50 M2 1400 HP A 1800 CPL 6801Document3 pagesKTA 50 M2 1400 HP A 1800 CPL 6801stefanmff04No ratings yet
- 999 07 003 014 PP-AR-200 - Rev-BDocument8 pages999 07 003 014 PP-AR-200 - Rev-BTien LamNo ratings yet
- Engine Curves D2868LE433 882@2300 2013 11 13Document1 pageEngine Curves D2868LE433 882@2300 2013 11 13tiago moitinhoNo ratings yet
- Mrs. Vandana - Aligarh - Master Walkin Closet and Bathroom Closet - WardrobeDocument6 pagesMrs. Vandana - Aligarh - Master Walkin Closet and Bathroom Closet - WardrobeChetna JoshiNo ratings yet
- SubsurfaceDocument258 pagesSubsurfaceMus'ab UsmanNo ratings yet
- Goldwind 1.5 MW PlatformDocument2 pagesGoldwind 1.5 MW PlatformMiguel Criollo0% (1)
- Ballast Calculations 01Document1 pageBallast Calculations 01Yudi DarmawanNo ratings yet
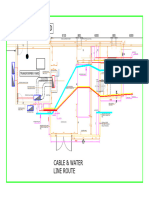
- Rop Sinaw Cable & Water Line RouteDocument1 pageRop Sinaw Cable & Water Line RouteAkbar DahriNo ratings yet
- ECO PaperDocument35 pagesECO PaperGaurav AgarwalNo ratings yet
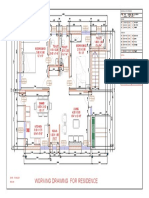
- Working Drawing For Residence: REV.R0 DATE: 10-08-2021Document1 pageWorking Drawing For Residence: REV.R0 DATE: 10-08-2021krishnaNo ratings yet
- Juanillas Activity 1Document2 pagesJuanillas Activity 1ALETHEA JUANILLASNo ratings yet
- Five Year Comparison For CompanyDocument1 pageFive Year Comparison For CompanyShivakumar TcNo ratings yet
- Sahdol Option 2Document1 pageSahdol Option 2concept2design23No ratings yet
- Activity 2 - Floor Plan Rendering 2023 - 4Document1 pageActivity 2 - Floor Plan Rendering 2023 - 4Lourd Raphael Thaddeus EmataNo ratings yet
- 3 Storey-Drawing-2Document1 page3 Storey-Drawing-2abhijeetpatil836No ratings yet
- Platform Ölçüleri̇Document1 pagePlatform Ölçüleri̇nrobisetiawan17No ratings yet
- In 1320805 PDFDocument1 pageIn 1320805 PDFSonu KumarNo ratings yet
- Mack Colobia 2008Document291 pagesMack Colobia 2008Vicente Ortiz Delgado100% (2)
- 122 R813DGX 6016618 I-n-Adaoui-Algeria 9-Feb-2016 LetterDocument1 page122 R813DGX 6016618 I-n-Adaoui-Algeria 9-Feb-2016 LetterjalalNo ratings yet
- PV Final VersionDocument47 pagesPV Final Versionseif azabNo ratings yet
- Textile Industry in IndiaDocument97 pagesTextile Industry in IndiaDharmendra B MistryNo ratings yet
- The Four Pillars of LearningDocument7 pagesThe Four Pillars of LearningAnonymous sYlElNGrMQNo ratings yet
- 1964 - Blyholder ModelDocument1 page1964 - Blyholder Model1592162022No ratings yet
- Module 1 Wk1 4th Key Concepts in Buying and Selling Commissions StudentDocument17 pagesModule 1 Wk1 4th Key Concepts in Buying and Selling Commissions StudentFrancine Arielle Bernales100% (1)
- LFN AnnexDocument10 pagesLFN AnnexAliNo ratings yet
- Verbal and Nonverbal Communication and Their Functions-3 - Group 42 GE-PC - PURPOSIVE COMMUNICATIONDocument6 pagesVerbal and Nonverbal Communication and Their Functions-3 - Group 42 GE-PC - PURPOSIVE COMMUNICATIONLowell James TigueloNo ratings yet
- Ronald J. Adamson 1Document2 pagesRonald J. Adamson 1Dan BaumanNo ratings yet
- Pubertad Precoz NEJMDocument12 pagesPubertad Precoz NEJMAdrianaGallardoTapiaNo ratings yet
- MMFT3055V Power MOSFET 1 Amp, 60 Volts: N Channel SOT 223Document7 pagesMMFT3055V Power MOSFET 1 Amp, 60 Volts: N Channel SOT 223remikhaledNo ratings yet
- Mycophenolate Information For Parents/CarersDocument12 pagesMycophenolate Information For Parents/CarersDavid LopezNo ratings yet
- Green Building Designing Innovation in India A Literature Review PDFDocument8 pagesGreen Building Designing Innovation in India A Literature Review PDFBulbul SahuNo ratings yet
- Michigan Department of Environmental Quality - Part 201 - Water QualityDocument6 pagesMichigan Department of Environmental Quality - Part 201 - Water Qualitylansingonline8587No ratings yet
- Lesson 2 - Pure Substances and MixturesDocument41 pagesLesson 2 - Pure Substances and Mixturescecil tayagNo ratings yet
- Moco Bagong Per Des 22Document41 pagesMoco Bagong Per Des 22BFT FARMNo ratings yet
- Gemstone Settings BLAD WebDocument8 pagesGemstone Settings BLAD WebInterweave75% (16)
- The 100 V1.1 BOM (My Version)Document2 pagesThe 100 V1.1 BOM (My Version)vekelet399No ratings yet
- (David de Las Morenas) The Book of Alpha - 30 RulesDocument151 pages(David de Las Morenas) The Book of Alpha - 30 RulesRd man80% (5)
- 4ES0 02 Rms 20120823Document9 pages4ES0 02 Rms 20120823Phyu Sin WinNo ratings yet
- Professional Responsibilities (AUD THEO)Document5 pagesProfessional Responsibilities (AUD THEO)Francine HollerNo ratings yet
- Sargonic and Gutian Periods PDFDocument182 pagesSargonic and Gutian Periods PDFRafael AzothNo ratings yet
- Mca Semester System Form & Courses First Semester of McaDocument70 pagesMca Semester System Form & Courses First Semester of Mcakbrahmateja5940No ratings yet
- Electrical Machines and Control: REAL TransformersDocument25 pagesElectrical Machines and Control: REAL TransformersAmmar Syahid RabbaniNo ratings yet
- Modal Auxiliary Verbs Lesson PlanDocument8 pagesModal Auxiliary Verbs Lesson PlanTrendy NewsNo ratings yet
- Subject ChemistryDocument13 pagesSubject ChemistryNikita JakharNo ratings yet
- Bangladesh Payment & Settlement System PDFDocument18 pagesBangladesh Payment & Settlement System PDFrokib0116No ratings yet
- Physics ProjectDocument11 pagesPhysics Projectadatta546No ratings yet
- Bridging Course Contemporary Culture Assingment 2Document4 pagesBridging Course Contemporary Culture Assingment 2Shahhana BegumNo ratings yet
- Key Issues ReflectionDocument7 pagesKey Issues ReflectionLee SuarezNo ratings yet





















































































Download as pptx, pdf, or txt
You might also like
- WIMMDocument27 pagesWIMMpartika13100% (2)
- MINTZBERGDocument32 pagesMINTZBERGgeezee10004464100% (2)
- 13 Japan Under The ShogunDocument22 pages13 Japan Under The Shogunapi-29949541290% (10)
- 155 - Flow Chart CV .8Document1 page155 - Flow Chart CV .8Mugywara luNo ratings yet
- JustiDocument1 pageJustiwesleyNo ratings yet
- PB - Stingblade 17.5 - BoliviaDocument1 pagePB - Stingblade 17.5 - BoliviapendexxNo ratings yet
- RX-16 - MRIL 6 inDocument15 pagesRX-16 - MRIL 6 inManu MohanNo ratings yet
- +xmer - Base Costing - 1PGDocument1 page+xmer - Base Costing - 1PGPaolo AfidchaoNo ratings yet
- Propeller Can Be Sized Within or Above The Speed Range ShownDocument3 pagesPropeller Can Be Sized Within or Above The Speed Range ShownadelsoNo ratings yet
- Screenshot 2023-07-04 at 6.15.49 PMDocument1 pageScreenshot 2023-07-04 at 6.15.49 PMAli md YounusNo ratings yet
- Pump House along-LINE PLANDocument1 pagePump House along-LINE PLANdanaokasho11No ratings yet
- 40 - Southern Cross - Iso Pump - 125 X 100 - 250 - 1200 3000 RPMDocument1 page40 - Southern Cross - Iso Pump - 125 X 100 - 250 - 1200 3000 RPMJAZZ KING PROJECTNo ratings yet
- Lecture 1 Introduction To CourseDocument20 pagesLecture 1 Introduction To CourseSudeep AryalNo ratings yet
- 2 - Power Vs RPMDocument12 pages2 - Power Vs RPMsudhanshu22kumar22No ratings yet
- MODULE Ib Variable Load ProblemDocument15 pagesMODULE Ib Variable Load ProblemRon Ely Dumo FloresNo ratings yet
- Tabla de Curvatura de BombaDocument2 pagesTabla de Curvatura de BombapochoNo ratings yet
- Numerical Analysis Notes: Plotting of Z F (X, Y) Contour-Lines With ExcelDocument9 pagesNumerical Analysis Notes: Plotting of Z F (X, Y) Contour-Lines With ExcelYemi AladejareNo ratings yet
- Civil Engineering Department CE475: Construction Methods Third 2023 Classwork 1Document2 pagesCivil Engineering Department CE475: Construction Methods Third 2023 Classwork 1cgc8bmxtgsNo ratings yet
- FB-77 Series (Spec)Document8 pagesFB-77 Series (Spec)tuanhnguyen2121990No ratings yet
- Link Tc0065 La Misa To Tc0057 Gloriabamba Proposal ReportDocument5 pagesLink Tc0065 La Misa To Tc0057 Gloriabamba Proposal ReportFrank aliaga berrocalNo ratings yet
- InRush Grupo 1 PantanilloDocument1 pageInRush Grupo 1 PantanilloCarlos MoralesNo ratings yet
- Parallel Pump Curves TA2538 X 4, 1760 RPM : L/Sec 200 300 400 500 600 700 800 900 1000 1100 1200Document1 pageParallel Pump Curves TA2538 X 4, 1760 RPM : L/Sec 200 300 400 500 600 700 800 900 1000 1100 1200Rubi AbionNo ratings yet
- Shelter and Tower Layout: Bts 1 Bts 2 PIUDocument1 pageShelter and Tower Layout: Bts 1 Bts 2 PIUshripalNo ratings yet
- Espec Tecnica MAN 440HP@1800 RPMDocument3 pagesEspec Tecnica MAN 440HP@1800 RPMjoroma58No ratings yet
- ARBU3 - Midterm Plate - BDocument3 pagesARBU3 - Midterm Plate - BMiah EchavesNo ratings yet
- T OpsDocument2 pagesT OpsJose CamposNo ratings yet
- Temporary Barracks Layout: Entry ExitDocument1 pageTemporary Barracks Layout: Entry ExitRenato PanganNo ratings yet
- Ejemplo Reporte Link Planner (RE)Document6 pagesEjemplo Reporte Link Planner (RE)Anderson NovaNo ratings yet
- Swimming Pool Finishing Details-Layout1-Abu Thakir PoolDocument1 pageSwimming Pool Finishing Details-Layout1-Abu Thakir Poolnithankarthik920No ratings yet
- CCTVDocument1 pageCCTVhanzel neonNo ratings yet
- Memomassa Ufu HorarioDocument1 pageMemomassa Ufu HorarioJoão Paulo Souza DiasNo ratings yet
- A123 20AH Data SheetDocument2 pagesA123 20AH Data SheetXavier ReibánNo ratings yet
- FR95017.01 Isb 6.7 230 HPDocument2 pagesFR95017.01 Isb 6.7 230 HPlancelotinternacionalsaNo ratings yet
- Wahh (Jog) - AdisutjiptoDocument13 pagesWahh (Jog) - Adisutjiptoreza100% (1)
- VisctronicDocument14 pagesVisctronicmigatitoxdNo ratings yet
- E1f 220V, 1ø, 2W+G E-1f 220V, 1ø, 2W+G E-Mp1 380y/220v, 3ø, 4W+G E-Mp2 380y/220v, 3ø, 4W+GDocument1 pageE1f 220V, 1ø, 2W+G E-1f 220V, 1ø, 2W+G E-Mp1 380y/220v, 3ø, 4W+G E-Mp2 380y/220v, 3ø, 4W+GAndy ArenasNo ratings yet
- CorrectionDocument1 pageCorrectionvikram soniNo ratings yet
- Sheet Pile-10kpa-400ton-Drained-Com1 - MODIFIED - AfDocument1 pageSheet Pile-10kpa-400ton-Drained-Com1 - MODIFIED - AfRasa RajaNo ratings yet
- Implementation of A State-Of-The-Art Cohesive Zone Ele-Ment For ANSYS MechanicalDocument4 pagesImplementation of A State-Of-The-Art Cohesive Zone Ele-Ment For ANSYS MechanicalL.a. MayorNo ratings yet
- Detail BatikDocument1 pageDetail Batikagus hwNo ratings yet
- 2 - Ground Floor Plan - Remarks - 2021228Document1 page2 - Ground Floor Plan - Remarks - 2021228majedNo ratings yet
- KTA 50 M2 1400 HP A 1800 CPL 6801Document3 pagesKTA 50 M2 1400 HP A 1800 CPL 6801stefanmff04No ratings yet
- 999 07 003 014 PP-AR-200 - Rev-BDocument8 pages999 07 003 014 PP-AR-200 - Rev-BTien LamNo ratings yet
- Engine Curves D2868LE433 882@2300 2013 11 13Document1 pageEngine Curves D2868LE433 882@2300 2013 11 13tiago moitinhoNo ratings yet
- Mrs. Vandana - Aligarh - Master Walkin Closet and Bathroom Closet - WardrobeDocument6 pagesMrs. Vandana - Aligarh - Master Walkin Closet and Bathroom Closet - WardrobeChetna JoshiNo ratings yet
- SubsurfaceDocument258 pagesSubsurfaceMus'ab UsmanNo ratings yet
- Goldwind 1.5 MW PlatformDocument2 pagesGoldwind 1.5 MW PlatformMiguel Criollo0% (1)
- Ballast Calculations 01Document1 pageBallast Calculations 01Yudi DarmawanNo ratings yet
- Rop Sinaw Cable & Water Line RouteDocument1 pageRop Sinaw Cable & Water Line RouteAkbar DahriNo ratings yet
- ECO PaperDocument35 pagesECO PaperGaurav AgarwalNo ratings yet
- Working Drawing For Residence: REV.R0 DATE: 10-08-2021Document1 pageWorking Drawing For Residence: REV.R0 DATE: 10-08-2021krishnaNo ratings yet
- Juanillas Activity 1Document2 pagesJuanillas Activity 1ALETHEA JUANILLASNo ratings yet
- Five Year Comparison For CompanyDocument1 pageFive Year Comparison For CompanyShivakumar TcNo ratings yet
- Sahdol Option 2Document1 pageSahdol Option 2concept2design23No ratings yet
- Activity 2 - Floor Plan Rendering 2023 - 4Document1 pageActivity 2 - Floor Plan Rendering 2023 - 4Lourd Raphael Thaddeus EmataNo ratings yet
- 3 Storey-Drawing-2Document1 page3 Storey-Drawing-2abhijeetpatil836No ratings yet
- Platform Ölçüleri̇Document1 pagePlatform Ölçüleri̇nrobisetiawan17No ratings yet
- In 1320805 PDFDocument1 pageIn 1320805 PDFSonu KumarNo ratings yet
- Mack Colobia 2008Document291 pagesMack Colobia 2008Vicente Ortiz Delgado100% (2)
- 122 R813DGX 6016618 I-n-Adaoui-Algeria 9-Feb-2016 LetterDocument1 page122 R813DGX 6016618 I-n-Adaoui-Algeria 9-Feb-2016 LetterjalalNo ratings yet
- PV Final VersionDocument47 pagesPV Final Versionseif azabNo ratings yet
- Textile Industry in IndiaDocument97 pagesTextile Industry in IndiaDharmendra B MistryNo ratings yet
- The Four Pillars of LearningDocument7 pagesThe Four Pillars of LearningAnonymous sYlElNGrMQNo ratings yet
- 1964 - Blyholder ModelDocument1 page1964 - Blyholder Model1592162022No ratings yet
- Module 1 Wk1 4th Key Concepts in Buying and Selling Commissions StudentDocument17 pagesModule 1 Wk1 4th Key Concepts in Buying and Selling Commissions StudentFrancine Arielle Bernales100% (1)
- LFN AnnexDocument10 pagesLFN AnnexAliNo ratings yet
- Verbal and Nonverbal Communication and Their Functions-3 - Group 42 GE-PC - PURPOSIVE COMMUNICATIONDocument6 pagesVerbal and Nonverbal Communication and Their Functions-3 - Group 42 GE-PC - PURPOSIVE COMMUNICATIONLowell James TigueloNo ratings yet
- Ronald J. Adamson 1Document2 pagesRonald J. Adamson 1Dan BaumanNo ratings yet
- Pubertad Precoz NEJMDocument12 pagesPubertad Precoz NEJMAdrianaGallardoTapiaNo ratings yet
- MMFT3055V Power MOSFET 1 Amp, 60 Volts: N Channel SOT 223Document7 pagesMMFT3055V Power MOSFET 1 Amp, 60 Volts: N Channel SOT 223remikhaledNo ratings yet
- Mycophenolate Information For Parents/CarersDocument12 pagesMycophenolate Information For Parents/CarersDavid LopezNo ratings yet
- Green Building Designing Innovation in India A Literature Review PDFDocument8 pagesGreen Building Designing Innovation in India A Literature Review PDFBulbul SahuNo ratings yet
- Michigan Department of Environmental Quality - Part 201 - Water QualityDocument6 pagesMichigan Department of Environmental Quality - Part 201 - Water Qualitylansingonline8587No ratings yet
- Lesson 2 - Pure Substances and MixturesDocument41 pagesLesson 2 - Pure Substances and Mixturescecil tayagNo ratings yet
- Moco Bagong Per Des 22Document41 pagesMoco Bagong Per Des 22BFT FARMNo ratings yet
- Gemstone Settings BLAD WebDocument8 pagesGemstone Settings BLAD WebInterweave75% (16)
- The 100 V1.1 BOM (My Version)Document2 pagesThe 100 V1.1 BOM (My Version)vekelet399No ratings yet
- (David de Las Morenas) The Book of Alpha - 30 RulesDocument151 pages(David de Las Morenas) The Book of Alpha - 30 RulesRd man80% (5)
- 4ES0 02 Rms 20120823Document9 pages4ES0 02 Rms 20120823Phyu Sin WinNo ratings yet
- Professional Responsibilities (AUD THEO)Document5 pagesProfessional Responsibilities (AUD THEO)Francine HollerNo ratings yet
- Sargonic and Gutian Periods PDFDocument182 pagesSargonic and Gutian Periods PDFRafael AzothNo ratings yet
- Mca Semester System Form & Courses First Semester of McaDocument70 pagesMca Semester System Form & Courses First Semester of Mcakbrahmateja5940No ratings yet
- Electrical Machines and Control: REAL TransformersDocument25 pagesElectrical Machines and Control: REAL TransformersAmmar Syahid RabbaniNo ratings yet
- Modal Auxiliary Verbs Lesson PlanDocument8 pagesModal Auxiliary Verbs Lesson PlanTrendy NewsNo ratings yet
- Subject ChemistryDocument13 pagesSubject ChemistryNikita JakharNo ratings yet
- Bangladesh Payment & Settlement System PDFDocument18 pagesBangladesh Payment & Settlement System PDFrokib0116No ratings yet
- Physics ProjectDocument11 pagesPhysics Projectadatta546No ratings yet
- Bridging Course Contemporary Culture Assingment 2Document4 pagesBridging Course Contemporary Culture Assingment 2Shahhana BegumNo ratings yet
- Key Issues ReflectionDocument7 pagesKey Issues ReflectionLee SuarezNo ratings yet