Download as pptx, pdf, or txt
You might also like
- Analytical & Digital PhotogrammetryDocument46 pagesAnalytical & Digital PhotogrammetryLuis Marquez Guillen100% (3)
- 2d AlignmentDocument41 pages2d AlignmentDeepa SNo ratings yet
- 3D Stereo CameraDocument7 pages3D Stereo CameraCharoensak CharayaphanNo ratings yet
- Vision Project Report PDFDocument21 pagesVision Project Report PDFMuhammad AnsarNo ratings yet
- Lecture #2: C Camera ModelDocument38 pagesLecture #2: C Camera ModelElisa PopNo ratings yet
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessAaqib IhrazNo ratings yet
- Project1Report (Prakash)Document12 pagesProject1Report (Prakash)pgnepal100% (1)
- Experiments in 3D Measurements by Using Single Camera and Accurate MotionDocument6 pagesExperiments in 3D Measurements by Using Single Camera and Accurate MotionĐường Khánh SơnNo ratings yet
- Image Segmentation Digital Image ProcessingDocument44 pagesImage Segmentation Digital Image Processingnaveednad2003556100% (1)
- Image Formation: - The Two Parts of The Image Formation ProcessDocument9 pagesImage Formation: - The Two Parts of The Image Formation ProcessRaaja RajaNo ratings yet
- CG-Lect 1 - Output PrimitivesDocument18 pagesCG-Lect 1 - Output PrimitivesrahulNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
- CV NotesDocument11 pagesCV NotesN.RAMAKUMARNo ratings yet
- Plane-Based Calibration of A Projector-Camera SystemDocument12 pagesPlane-Based Calibration of A Projector-Camera SystemDonato FormicolaNo ratings yet
- Assignment AnswersDocument8 pagesAssignment AnswersSteffi CruzNo ratings yet
- Plane-Based Calibration of A Projector-Camera SystemDocument12 pagesPlane-Based Calibration of A Projector-Camera Systemfleming3No ratings yet
- Visual Servo Control TheoryDocument42 pagesVisual Servo Control TheoryP NagarajanNo ratings yet
- Image Pre-Processing: Ashish KhareDocument43 pagesImage Pre-Processing: Ashish KharerenukaNo ratings yet
- Zhang 2002Document14 pagesZhang 2002Liem NguyenNo ratings yet
- Simlote 2019 Ijca 919377 PDFDocument4 pagesSimlote 2019 Ijca 919377 PDFMegha SimloteNo ratings yet
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsDocument7 pages2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaNo ratings yet
- Implementing DSP Algorithms Using Spartan-3 FpgasDocument4 pagesImplementing DSP Algorithms Using Spartan-3 FpgasAkshat AgrawalNo ratings yet
- Stereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Document29 pagesStereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Rekha JayaprakashNo ratings yet
- 4 Step Camera CalibrationDocument7 pages4 Step Camera Calibrationapex900No ratings yet
- Camera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011Document9 pagesCamera Calibration Technique Using Tsai'S Algorithm: Vol. 1 Issue 2 January 2011admin2146No ratings yet
- A Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationDocument8 pagesA Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationswoneraNo ratings yet
- CalibrationDocument10 pagesCalibrationAyesha HussainNo ratings yet
- Demystifying Geometric Camera Calibration For Intrinsic Matrix - BitsMakeMeCrazy - BR - Kushal Vyas's BlogDocument14 pagesDemystifying Geometric Camera Calibration For Intrinsic Matrix - BitsMakeMeCrazy - BR - Kushal Vyas's BlogAMINA M SNo ratings yet
- Active Intrinsic Calibration Using Vanishing PointsDocument6 pagesActive Intrinsic Calibration Using Vanishing PointsRajul RahmadNo ratings yet
- Chapter Four: Digital Image ProcessingDocument36 pagesChapter Four: Digital Image Processingengida tesfamariamNo ratings yet
- ImageDocument14 pagesImageShanjuJossiahNo ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- Bundle AdjustmentDocument14 pagesBundle Adjustmentfaizz islammNo ratings yet
- Camera Calibration ThesisDocument5 pagesCamera Calibration Thesislaurahallportland100% (2)
- Using Vanishing Points For Camera CalibrationDocument26 pagesUsing Vanishing Points For Camera CalibrationLucas D.AvilaNo ratings yet
- The Techniques For Face Recognition With Support Vector MachinesDocument6 pagesThe Techniques For Face Recognition With Support Vector MachinesUdegbe AndreNo ratings yet
- Math of PhotogrammetryDocument16 pagesMath of PhotogrammetryKen LimNo ratings yet
- Camera Calibration Using Three Sets of Parallel Lines Echigo1990Document9 pagesCamera Calibration Using Three Sets of Parallel Lines Echigo1990Rajul RahmadNo ratings yet
- 3D Reconstruction - Computer VisionDocument6 pages3D Reconstruction - Computer Visiontejas.s.mathaiNo ratings yet
- ITS Master 15963 Paper PDFDocument6 pagesITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedNo ratings yet
- What Is The Goal Stereo Vision?Document7 pagesWhat Is The Goal Stereo Vision?Sentinel BergNo ratings yet
- Assignment1 2017wDocument3 pagesAssignment1 2017wNeev TighnavardNo ratings yet
- Camera CalibrationDocument41 pagesCamera Calibrationbharadwaja502No ratings yet
- Power Transmission Tower Type Determining Method Based On Aerial Image AnalysisDocument5 pagesPower Transmission Tower Type Determining Method Based On Aerial Image AnalysisaufacikNo ratings yet
- Ivs2006 2Document8 pagesIvs2006 2Ricardo RomeroNo ratings yet
- Prs Lab Eng DTDocument7 pagesPrs Lab Eng DTTeodora FurcoviciNo ratings yet
- Computer Graphics - Chapter 3 (1) - 2Document35 pagesComputer Graphics - Chapter 3 (1) - 2Sương TrầnNo ratings yet
- Ipmv Mod 5&6 (Theory Questions)Document11 pagesIpmv Mod 5&6 (Theory Questions)Ashwin ANo ratings yet
- Introduction To Q-400 Digital Image Correlation V2Document5 pagesIntroduction To Q-400 Digital Image Correlation V2Alex J. GonzálezNo ratings yet
- Final ProgrectDocument14 pagesFinal Progrectapi-269933347No ratings yet
- Camera Calibration and 3D Reconstruction - OpenCV 2.4.13.2 DocumentationDocument48 pagesCamera Calibration and 3D Reconstruction - OpenCV 2.4.13.2 DocumentationMirko MoratiNo ratings yet
- Digital Image Processing: Assignment No. 2Document18 pagesDigital Image Processing: Assignment No. 2Daljit SinghNo ratings yet
- IT AssignmentDocument14 pagesIT AssignmentChandan KumarNo ratings yet
- Computer Vision: Homework 5 3D ReconstructionDocument6 pagesComputer Vision: Homework 5 3D ReconstructionNorah M KiggunduNo ratings yet
- AnimationDocument9 pagesAnimationAruna AruchamiNo ratings yet
- Realtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic EnvironmentsDocument6 pagesRealtime Omnidirectional Stereo For Obstacle Detection and Tracking in Dynamic Environmentsestraj1954No ratings yet
- CH2 - Drawing AlgorithmsDocument89 pagesCH2 - Drawing AlgorithmsChapiNo ratings yet
- Geometry of Image Formation - LearnOpenCV #Document7 pagesGeometry of Image Formation - LearnOpenCV #KajalNo ratings yet
- Computer Vision Fundamental Matrix: Please, suggest a subtitle for a book with title 'Computer Vision Fundamental Matrix' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.From EverandComputer Vision Fundamental Matrix: Please, suggest a subtitle for a book with title 'Computer Vision Fundamental Matrix' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.No ratings yet
- Pinhole Camera Model: Understanding Perspective through Computational OpticsFrom EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNo ratings yet
- Lecture 4 - 3D DrawingsDocument56 pagesLecture 4 - 3D Drawingsfrank musaNo ratings yet
- Calculus and ProbabilityDocument67 pagesCalculus and ProbabilityBogdan GhiorghiuNo ratings yet
- Jmo 2000Document3 pagesJmo 2000Dr Shyam Sundar AgrawalNo ratings yet
- Scalar and Vector Functions, Point Functions, Scalar Point Functions, Vector PDFDocument2 pagesScalar and Vector Functions, Point Functions, Scalar Point Functions, Vector PDFMahesh Kumar100% (1)
- Chapter 12 - Kinetics of Particles - Part 1 and 2Document30 pagesChapter 12 - Kinetics of Particles - Part 1 and 2Ahmed AliNo ratings yet
- Geometry Formulas 2D 3D Perimeter Area Volume PDFDocument2 pagesGeometry Formulas 2D 3D Perimeter Area Volume PDFsunilNo ratings yet
- MAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringDocument2 pagesMAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringSHIVAM MAANNo ratings yet
- UAF Entry Test Math MCQs For MphilDocument110 pagesUAF Entry Test Math MCQs For MphilAbdul Qadir JelaniNo ratings yet
- Conic Sections Practice Test PDFDocument10 pagesConic Sections Practice Test PDFahmedNo ratings yet
- Measurement of Internal Radius by A Slip Gauge 3Document9 pagesMeasurement of Internal Radius by A Slip Gauge 3sen_subhasis_58No ratings yet
- Compositions of TransformationsDocument8 pagesCompositions of TransformationsRudraharaNo ratings yet
- Maths in Design of TemplesDocument31 pagesMaths in Design of Templesdivyani dalalNo ratings yet
- Voronoi Diagram - WikipediaDocument19 pagesVoronoi Diagram - WikipediaBananaNo ratings yet
- Answers Dubai Tests Math IIDocument10 pagesAnswers Dubai Tests Math IIMMMNo ratings yet
- Autocad 2007 PDFDocument29 pagesAutocad 2007 PDFAryxan YBNo ratings yet
- Area and Arc Length in Polar Coordinates Note Sheet - Calculus IIIDocument2 pagesArea and Arc Length in Polar Coordinates Note Sheet - Calculus IIIAnay BansalNo ratings yet
- HKMO2012heat PDFDocument5 pagesHKMO2012heat PDFChai Usajai UsajaiNo ratings yet
- The Lagrangian MethodDocument15 pagesThe Lagrangian MethodОгњен Гроздановић100% (1)
- The Rayleigh-Plateau InstabilityDocument27 pagesThe Rayleigh-Plateau InstabilitySam RoelantsNo ratings yet
- Worksheet 3-4 P. 2Document1 pageWorksheet 3-4 P. 2briandmcneillNo ratings yet
- Spatial Databases: Esteban ZIM AnyiDocument89 pagesSpatial Databases: Esteban ZIM AnyiRaViji YogeshNo ratings yet
- Motion 9Document11 pagesMotion 9AnilNo ratings yet
- CircleDocument35 pagesCircleNadeem ShoukatNo ratings yet
- Unit 3: Calc Paper 3Document17 pagesUnit 3: Calc Paper 3MissMillerNo ratings yet
- Approximation TheoryDocument159 pagesApproximation Theoryvahid100% (1)
- Hestnes 1986 - Clifford Algebra and The Interpretation of Quantum MechanicsDocument18 pagesHestnes 1986 - Clifford Algebra and The Interpretation of Quantum MechanicsRanjan BasuNo ratings yet
- Advanced Mathematics 1: C W CeliaDocument6 pagesAdvanced Mathematics 1: C W CeliaArvind KumarNo ratings yet
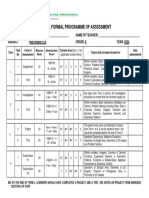
- Grade 8 POA 2024Document1 pageGrade 8 POA 2024Sabelo james BhembeNo ratings yet
- Geometry 15 PubDocument14 pagesGeometry 15 PubSayantanNo ratings yet