Download as ppt, pdf, or txt
You might also like
- Robert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDocument254 pagesRobert D. Blevins - Flow-Induced Vibration (2001, Krieger Pub Co) PDFDang Dinh DongNo ratings yet
- Galaxy at War - Star Wars SagaDocument225 pagesGalaxy at War - Star Wars SagaSebastián Rigoni100% (7)
- Lect 1 Introduction To Process ControlDocument4 pagesLect 1 Introduction To Process ControlZaidoon MohsinNo ratings yet
- How To Sell Without Selling - Step - by - Step Marketing Formula To Attract Ready - To - Buy Clients Create Passive Income and Make More Money While Making A DifferenceDocument287 pagesHow To Sell Without Selling - Step - by - Step Marketing Formula To Attract Ready - To - Buy Clients Create Passive Income and Make More Money While Making A Differencedebanikg100% (7)
- Class 2 Classification of Control Systems With ExemplesDocument31 pagesClass 2 Classification of Control Systems With ExemplesAcharya Mascara PlaudoNo ratings yet
- Chapter1 2Document32 pagesChapter1 2hailegebreselassie24No ratings yet
- Chapter 3.0 - Block DiagramDocument37 pagesChapter 3.0 - Block DiagramAzyan Wafiqah AzmiNo ratings yet
- Unit 1 Control SystemDocument86 pagesUnit 1 Control SystemVijay Ct67% (3)
- Learning Unit 03: Control SystemsDocument11 pagesLearning Unit 03: Control SystemsFuji smbeTNo ratings yet
- Tee 422 Lec-1Document51 pagesTee 422 Lec-1REJAY89No ratings yet
- 000 Digital Control LecturesDocument67 pages000 Digital Control LecturesPX PRNo ratings yet
- Chapter 1Document25 pagesChapter 1blaze emberNo ratings yet
- Unit-1 NotesDocument43 pagesUnit-1 NotesMD SHAHRIARMAHMUDNo ratings yet
- Lec 1Document28 pagesLec 1Udayanga SasangaNo ratings yet
- 1.1. Control Systems Definitions: Controlled VariableDocument19 pages1.1. Control Systems Definitions: Controlled Variableተሸመ ገረዝጊሄርNo ratings yet
- Open Loop & Closed Loop SystemDocument7 pagesOpen Loop & Closed Loop SystemArun GoraiNo ratings yet
- UNIT - 01 Introduction and Mathematical Modeling To Control SystemsDocument68 pagesUNIT - 01 Introduction and Mathematical Modeling To Control SystemsMD SHAHRIARMAHMUDNo ratings yet
- Chapter OneDocument21 pagesChapter OnetimketaNo ratings yet
- Chapter 3-Introduction To Control SystemDocument7 pagesChapter 3-Introduction To Control SystemLaily EdarisNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Lecture 1 Introduction To Control SystemDocument14 pagesLecture 1 Introduction To Control SystemSyamil TamlikhaNo ratings yet
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocument34 pagesProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshNo ratings yet
- Introduction To Control SystemDocument4 pagesIntroduction To Control SystemDarrel PasaloNo ratings yet
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiNo ratings yet
- Lab Manual - Control System EngineeringDocument39 pagesLab Manual - Control System Engineeringvineetanishad50% (2)
- Module 1Document35 pagesModule 1AlphaBravoNo ratings yet
- Control Systems Overview Professor GopalankrishnaDocument23 pagesControl Systems Overview Professor GopalankrishnaJameNo ratings yet
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- WISEM-2020-21 ECE2010 ETH VL2020211000161 Reference Material I 10-Nov-2020 Unit-1-New1Document56 pagesWISEM-2020-21 ECE2010 ETH VL2020211000161 Reference Material I 10-Nov-2020 Unit-1-New1Deepak PraiseNo ratings yet
- Unit No - II: Block Diagram RepresentationDocument56 pagesUnit No - II: Block Diagram RepresentationNamrta DeokateNo ratings yet
- A Laboratory Journal For: Control System Engineering (2150909)Document37 pagesA Laboratory Journal For: Control System Engineering (2150909)Bhavik PrajapatiNo ratings yet
- CS Lecture Notes Units 1 2 3Document88 pagesCS Lecture Notes Units 1 2 3sushinkNo ratings yet
- Class1 PDFDocument46 pagesClass1 PDFJ Andrés SalasNo ratings yet
- Control System TechnologyDocument7 pagesControl System TechnologyMadan BhojleNo ratings yet
- Class III Mecha.Document23 pagesClass III Mecha.yodahe aberaNo ratings yet
- NotesDocument72 pagesNotes026Himani GautamNo ratings yet
- Presentation 1Document28 pagesPresentation 1Sithy JuhaniyaNo ratings yet
- Open Closed Loop NotesDocument4 pagesOpen Closed Loop Notesm4yw6dtztjNo ratings yet
- ECE 331 Complete NotesDocument129 pagesECE 331 Complete NotespolygatoneoderaNo ratings yet
- Class FourDocument52 pagesClass FourTemari futureNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- TEL 433 Lect 01 NOTE IntroductionDocument9 pagesTEL 433 Lect 01 NOTE IntroductionTestimonyNo ratings yet
- Chapter OneDocument35 pagesChapter OneKirubel MulugetaNo ratings yet
- Pid Tuning MethodsDocument16 pagesPid Tuning MethodsNirmal sachanNo ratings yet
- Lecture # 02 Control System TerminologiesDocument29 pagesLecture # 02 Control System TerminologiesAfsheen ZaibNo ratings yet
- System Dynamics AND Control: Chapter 1 IntroductionDocument54 pagesSystem Dynamics AND Control: Chapter 1 Introductionali kartalNo ratings yet
- Control System Engineering: InstructorsDocument49 pagesControl System Engineering: InstructorsHANSANo ratings yet
- LTCSDKDocument8 pagesLTCSDKhoquangloi789No ratings yet
- FinalDocument26 pagesFinalquanghuy.vo.saigonNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Lecture 01 Overview of Control SystemsDocument32 pagesLecture 01 Overview of Control Systemscesar ruizNo ratings yet
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- C4: Control TerminologiesDocument72 pagesC4: Control TerminologiesOladokun Sulaiman OlanrewajuNo ratings yet
- Mechatronics NotesDocument90 pagesMechatronics NotesSanskar AgrawalNo ratings yet
- MK Mecha ch1Document13 pagesMK Mecha ch1seifu hailemariamNo ratings yet
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 pagesClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARNo ratings yet
- Lcs Unit 1 PDFDocument30 pagesLcs Unit 1 PDFRajasekhar AtlaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- SSC Unit - I Lecture 0Document24 pagesSSC Unit - I Lecture 0Girish Shankar MishraNo ratings yet
- Bode PlotDocument9 pagesBode PlotGirish Shankar MishraNo ratings yet
- SSC Unit - I Lecture 2Document29 pagesSSC Unit - I Lecture 2Girish Shankar MishraNo ratings yet
- SSC UNIT - II Lecture 3Document10 pagesSSC UNIT - II Lecture 3Girish Shankar MishraNo ratings yet
- BEEE UNIT IV - Lecture 6Document31 pagesBEEE UNIT IV - Lecture 6Girish Shankar MishraNo ratings yet
- Beee PPT - 8Document19 pagesBeee PPT - 8Girish Shankar MishraNo ratings yet
- Beee PPT - 3Document35 pagesBeee PPT - 3Girish Shankar MishraNo ratings yet
- BEEE UNIT IV - Lecture 4 & 5Document32 pagesBEEE UNIT IV - Lecture 4 & 5Girish Shankar MishraNo ratings yet
- UNIT - IV - Semiconductor DevicesDocument23 pagesUNIT - IV - Semiconductor DevicesGirish Shankar MishraNo ratings yet
- UNIT - IV - Semiconductor DevicesDocument19 pagesUNIT - IV - Semiconductor DevicesGirish Shankar MishraNo ratings yet
- Beee PPT - 5Document24 pagesBeee PPT - 5Girish Shankar MishraNo ratings yet
- Beee PPT - 2Document20 pagesBeee PPT - 2Girish Shankar MishraNo ratings yet
- Beee PPT - 1Document12 pagesBeee PPT - 1Girish Shankar MishraNo ratings yet
- Beee Unit II - Lecture 5Document14 pagesBeee Unit II - Lecture 5Girish Shankar MishraNo ratings yet
- Beee PPT - 4Document27 pagesBeee PPT - 4Girish Shankar MishraNo ratings yet
- Transformers: Basics and Types: " Transformers Are The Heart of The Alternating Current System."Document28 pagesTransformers: Basics and Types: " Transformers Are The Heart of The Alternating Current System."Girish Shankar MishraNo ratings yet
- Social Anthropology Group AssignmentDocument6 pagesSocial Anthropology Group AssignmentKidus SeleshiNo ratings yet
- How To Calculate Paint QtyDocument2 pagesHow To Calculate Paint QtyVijay GaikwadNo ratings yet
- Abhijeet Sharma, 047 Assignment.Document3 pagesAbhijeet Sharma, 047 Assignment.GOURAV MISHRANo ratings yet
- Jadwal Interview Analisa Jabatan BP V 2Document3 pagesJadwal Interview Analisa Jabatan BP V 2Reza ZachrandNo ratings yet
- Lesson Plan Template - Social EmotionalDocument2 pagesLesson Plan Template - Social Emotionalapi-573540610No ratings yet
- Covid 19 Notifiable PIDsr PDFDocument73 pagesCovid 19 Notifiable PIDsr PDFjheanniver nabloNo ratings yet
- Is 805Document38 pagesIs 805Sse SteelNo ratings yet
- Sociotope MappingDocument13 pagesSociotope MappingEmilija AntevskaNo ratings yet
- Procedures For Project Formulation and Management (PPFM) in DrdoDocument86 pagesProcedures For Project Formulation and Management (PPFM) in Drdomkarya_247850155No ratings yet
- CH1502LDocument87 pagesCH1502LDivyakumar PatelNo ratings yet
- S5-1-2 - Typical Steel Beam DetailsDocument1 pageS5-1-2 - Typical Steel Beam DetailsTony PedaNo ratings yet
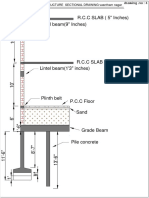
- R.C.C SLAB (5" Inches) Lintel Beam (9" Inches) : Structure Sectional Drawing Vasntham NagarDocument1 pageR.C.C SLAB (5" Inches) Lintel Beam (9" Inches) : Structure Sectional Drawing Vasntham NagarsanthoshNo ratings yet
- Sarcasm Detection For Hindi English Code Mixed Twitter DataDocument8 pagesSarcasm Detection For Hindi English Code Mixed Twitter DataIJRASETPublicationsNo ratings yet
- Bio PsychologyDocument30 pagesBio PsychologyNEHA JUNEJANo ratings yet
- Technological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingDocument4 pagesTechnological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingtipqccagssdNo ratings yet
- Sairam OopsDocument103 pagesSairam OopsRakshit AshNo ratings yet
- Missile Technology Control Regime - HandbookDocument267 pagesMissile Technology Control Regime - HandbookHector VillarrealNo ratings yet
- Nethravathi River - Water Supply Scheme in DakshinDocument8 pagesNethravathi River - Water Supply Scheme in DakshinMitria WidianingtiasNo ratings yet
- TenderdocumentDocument53 pagesTenderdocumentBalaji AssociatesNo ratings yet
- ExergyDocument27 pagesExergyniralnaikNo ratings yet
- Iso 11464Document15 pagesIso 11464zvjesosNo ratings yet
- Creating Barcodes in OfficeDocument24 pagesCreating Barcodes in OfficeMaxi Rambi RuntuweneNo ratings yet
- David J. A. Clines The Theme of The Pentateuch Jsot Supplement Series, 10 1997 PDFDocument177 pagesDavid J. A. Clines The Theme of The Pentateuch Jsot Supplement Series, 10 1997 PDFVeteris Testamenti Lector100% (14)
- Week 4 Assignment PDFDocument5 pagesWeek 4 Assignment PDFTilakLNRangaNo ratings yet
- Paint Finishing Quality and Defect AnalysisDocument6 pagesPaint Finishing Quality and Defect AnalysisAnurag SrivastavaNo ratings yet
- Should A Person Who Is Brain Dead Be Kept AliveDocument3 pagesShould A Person Who Is Brain Dead Be Kept AliveHaziel PavonNo ratings yet
- Bulldozer: Tough World. Tough EquipmentDocument2 pagesBulldozer: Tough World. Tough EquipmentedholminNo ratings yet