
Ast351 3.2.4
Ast351 3.2.4
You might also like
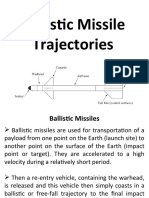
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesAdrian ArasuNo ratings yet
- Maths Project-Conic SectionsDocument12 pagesMaths Project-Conic Sectionsapi-24745075689% (9)
- Ast351 3.2.6Document15 pagesAst351 3.2.6rkshwh1978No ratings yet
- Ast351 3.2.3Document12 pagesAst351 3.2.3rkshwh1978No ratings yet
- Ast351 3.2.8Document12 pagesAst351 3.2.8rkshwh1978No ratings yet
- Ast351 3.2.7Document10 pagesAst351 3.2.7rkshwh1978No ratings yet
- Ast351 3.2.2Document14 pagesAst351 3.2.2rkshwh1978No ratings yet
- Ast351 3.1.6Document16 pagesAst351 3.1.6rkshwh1978No ratings yet
- NAV 224 PPT Semi Final Week 1 2Document60 pagesNAV 224 PPT Semi Final Week 1 2Jethro Lars UmbaoNo ratings yet
- Satellite Parameters Trajectories Module1Document94 pagesSatellite Parameters Trajectories Module1Gahan A V GowdaNo ratings yet
- Flow Simulation Over Re-Entry Bodies at Supersonic & Hypersonic SpeedsDocument6 pagesFlow Simulation Over Re-Entry Bodies at Supersonic & Hypersonic SpeedsIJERDNo ratings yet
- Vector GeometryDocument6 pagesVector GeometryMohamed EmadNo ratings yet
- Expt Projectile MotionDocument6 pagesExpt Projectile MotionGeorgette RepunteNo ratings yet
- Orbit Maneuvers - Reference Material PDFDocument27 pagesOrbit Maneuvers - Reference Material PDFPARI VERMA 20BAS10054No ratings yet
- Lunar TrajectoriesDocument19 pagesLunar TrajectoriesAdrian ArasuNo ratings yet
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesJunnuNo ratings yet
- A Geometrical Background For de Sitter's World by H.S.M. CoxeterDocument13 pagesA Geometrical Background For de Sitter's World by H.S.M. CoxeterTomás CampoNo ratings yet
- Proyección HexagonalDocument17 pagesProyección HexagonalHenry Castro ArandaNo ratings yet
- 1p1 2013 14 Mechanics Examples Paper 1Document5 pages1p1 2013 14 Mechanics Examples Paper 1Gabriel HoNo ratings yet
- Survey of Orbital Dynamics of Space Rendezvous VehiclesDocument14 pagesSurvey of Orbital Dynamics of Space Rendezvous VehiclesSarfaraz Nawaz ShahaNo ratings yet
- Ast351 3.2.1Document13 pagesAst351 3.2.1rkshwh1978No ratings yet
- A Rolling Sphere ExperimentDocument3 pagesA Rolling Sphere ExperimentNazareno Getter Ferreira de MedeirosNo ratings yet
- Ballistic Missile Trajectory Prediction Using A State Transition MatrixDocument16 pagesBallistic Missile Trajectory Prediction Using A State Transition MatrixNeetu SharmaNo ratings yet
- Survey Methods CalculationsDocument15 pagesSurvey Methods CalculationsHamed YousifNo ratings yet
- Lecture 1.1 Stereonets Intro Extra Text PDFDocument4 pagesLecture 1.1 Stereonets Intro Extra Text PDFBradley D'souzaNo ratings yet
- Adc Module 4Document51 pagesAdc Module 421951a2104No ratings yet
- Geogebra Cycloid PDFDocument20 pagesGeogebra Cycloid PDFJimNo ratings yet
- I - Sustainability Development Goal:: Title: Point of Contact & Email: Co-Authors: OrganizationDocument5 pagesI - Sustainability Development Goal:: Title: Point of Contact & Email: Co-Authors: OrganizationFahim MunawarNo ratings yet
- Solid Angle - Wikipedia, The Free EncyclopediaDocument8 pagesSolid Angle - Wikipedia, The Free Encyclopediayerlis21No ratings yet
- AS3050 - Assignment 3 - S-C Att Dyn - Orb MechDocument2 pagesAS3050 - Assignment 3 - S-C Att Dyn - Orb MechSneakyRiderNo ratings yet
- Motion in Two DimensionsDocument37 pagesMotion in Two DimensionsTABIBI11No ratings yet
- Mekanika Benda Langit - Gerak Dalam Orbit & Transfer OrbitDocument30 pagesMekanika Benda Langit - Gerak Dalam Orbit & Transfer OrbitafaqihudinNo ratings yet
- Equations of Motion of A Spin-Stabilized Projectile For Flight Stability TestingDocument12 pagesEquations of Motion of A Spin-Stabilized Projectile For Flight Stability TestingnanocardosoNo ratings yet
- Gravitational WellDocument8 pagesGravitational WellIJRASETPublicationsNo ratings yet
- TO TO: Application of The Leading-Edge-Suction Analogy of Vortex Lift The Drag Due Lift Sharp-Edge Delta WingsDocument17 pagesTO TO: Application of The Leading-Edge-Suction Analogy of Vortex Lift The Drag Due Lift Sharp-Edge Delta WingsAnders OlofssonNo ratings yet
- Surveying Lab IIDocument35 pagesSurveying Lab IIfaiz19aaNo ratings yet
- CH - 4 Motion in A PlaneDocument41 pagesCH - 4 Motion in A PlaneishayanarahtNo ratings yet
- MotioninAPlane Paper 01Document9 pagesMotioninAPlane Paper 01nishantsingh232009No ratings yet
- Orbital Mechanics: Conic SectionsDocument22 pagesOrbital Mechanics: Conic Sectionsoluwatosin PereiraNo ratings yet
- Nasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsDocument16 pagesNasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsAngel Villalonga MoralesNo ratings yet
- Space DynamicsDocument4 pagesSpace DynamicsShubham ShekharNo ratings yet
- 5 CE222F-18 Fieldworks 5 - Reverse CurveDocument8 pages5 CE222F-18 Fieldworks 5 - Reverse CurveJoana Marie RemoNo ratings yet
- NASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible FlowDocument79 pagesNASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible Flowmssj87No ratings yet
- Polar Equations of Conics: Alternative Definition of ConicDocument7 pagesPolar Equations of Conics: Alternative Definition of ConicBeto LangNo ratings yet
- 2013 1 BaranowskiDocument13 pages2013 1 Baranowskipaulo gontranNo ratings yet
- Balistica en InglesDocument59 pagesBalistica en Inglesmatias primeroNo ratings yet
- Gap and Stagger Effects On Biplanes With End Plates: The University of Dayton, Dayton, OH 45469-0238Document13 pagesGap and Stagger Effects On Biplanes With End Plates: The University of Dayton, Dayton, OH 45469-0238SubhasreeNo ratings yet
- Azimuth Method For Ship Position in Celestial NavigationDocument8 pagesAzimuth Method For Ship Position in Celestial NavigationVen TvNo ratings yet
- Mat11 PDFDocument13 pagesMat11 PDFRaquel Martins E SilvaNo ratings yet
- Motion in 2 DimensionsDocument31 pagesMotion in 2 DimensionsAngilyn LumabasNo ratings yet
- Module1 - Satellite Communication VTU 7th SemDocument127 pagesModule1 - Satellite Communication VTU 7th Semrohan gowdaNo ratings yet
- Pancharatnam Phase ManualDocument8 pagesPancharatnam Phase ManualPratik PatnaikNo ratings yet
- Vertical Angles Deviations of The Vertical and AdjustmentDocument36 pagesVertical Angles Deviations of The Vertical and AdjustmentjoaosevanNo ratings yet
- Aerodynamic Centers of Arbitrary Airfoils Below StallDocument42 pagesAerodynamic Centers of Arbitrary Airfoils Below StallJared EnocNo ratings yet
- Explain Quantum Physics With a Single-Particle in Motion: Anharmonic OscillatorFrom EverandExplain Quantum Physics With a Single-Particle in Motion: Anharmonic OscillatorNo ratings yet
- Curvilinear Perspective: Exploring Depth Perception in Computer VisionFrom EverandCurvilinear Perspective: Exploring Depth Perception in Computer VisionNo ratings yet
- Elementary Positional Astronomy Supported by PC Software ProgramsFrom EverandElementary Positional Astronomy Supported by PC Software ProgramsRating: 5 out of 5 stars5/5 (1)
- Ast351 3.1.6Document16 pagesAst351 3.1.6rkshwh1978No ratings yet
- Ast351 3.2.7Document10 pagesAst351 3.2.7rkshwh1978No ratings yet
- Ast351 3.2.8Document12 pagesAst351 3.2.8rkshwh1978No ratings yet
- Ast351 3.2.2Document14 pagesAst351 3.2.2rkshwh1978No ratings yet
- BSECE 2018 2019 Curriculum FlowchartDocument1 pageBSECE 2018 2019 Curriculum Flowchartstephen villaruzNo ratings yet
- Mechanical Performance of A New Type of Earth Masonry PDFDocument13 pagesMechanical Performance of A New Type of Earth Masonry PDFFarida Diab SarmoukNo ratings yet
- Self-Aerated Flows On Chutes and SpillwaysDocument31 pagesSelf-Aerated Flows On Chutes and SpillwaysdjajadjajaNo ratings yet
- Shear Test For Rock PDFDocument7 pagesShear Test For Rock PDFAnonymous v1blzDsEWANo ratings yet
- Agitator Power Requirement and Mixing Intensity CalculationDocument28 pagesAgitator Power Requirement and Mixing Intensity Calculationpankit mehtaNo ratings yet
- Heat Flow Analysis of Cooling Pipes in Young Hardening ConcreteDocument40 pagesHeat Flow Analysis of Cooling Pipes in Young Hardening ConcreteTao YinNo ratings yet
- First Semester: Faculty of Engineering Department of Mechanical EngineeringDocument27 pagesFirst Semester: Faculty of Engineering Department of Mechanical Engineeringozoemena29No ratings yet
- Fluid Report 2 1Document10 pagesFluid Report 2 1Jin AhmedNo ratings yet
- Quantum Mechanics Angular MomentumDocument13 pagesQuantum Mechanics Angular MomentumTo Get HerNo ratings yet
- Acoustic Waves PDFDocument479 pagesAcoustic Waves PDFRAUL EDUARDO GUTIERREZ COITIÑONo ratings yet
- Unit 3 Analysis Arches: StructureDocument22 pagesUnit 3 Analysis Arches: Structurevishnu vijayanNo ratings yet
- Lee Method7831Document6 pagesLee Method7831Priya BharadwajNo ratings yet
- Aristotelian and Galilean Views On MotionDocument26 pagesAristotelian and Galilean Views On MotionMARIA BELENDA GALLEGANo ratings yet
- StaticsDocument30 pagesStaticsJm Beja100% (1)
- Tensile Test Lap ReportDocument11 pagesTensile Test Lap ReportApostrophe Fareez ImprezzaNo ratings yet
- CFD Assignment ADocument3 pagesCFD Assignment APeter WapadaerNo ratings yet
- Structural MechanicsDocument9 pagesStructural MechanicsRoshan RawalNo ratings yet
- Fluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Document22 pagesFluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Raúl Sánchez100% (1)
- Laboratory For TractionDocument13 pagesLaboratory For TractionsiritapeNo ratings yet
- RILEM TC 162-TDF Test and Design Methods For SFRCDocument8 pagesRILEM TC 162-TDF Test and Design Methods For SFRCDan MaceNo ratings yet
- Journal of Pipeline Science and Engineering: E. Fathi, S.H. HashemiDocument8 pagesJournal of Pipeline Science and Engineering: E. Fathi, S.H. Hashemiargentino_ar01No ratings yet
- Problem 548Document14 pagesProblem 548mike jobernard f. solangonNo ratings yet
- A Computer Method For Nonlinear Inelastic Analysis of 3D Composite Steel-Concrete Frame StructuresDocument28 pagesA Computer Method For Nonlinear Inelastic Analysis of 3D Composite Steel-Concrete Frame StructuresDalilah PiresNo ratings yet
- Electroacoustic Resonators: System Identification and StabilityDocument8 pagesElectroacoustic Resonators: System Identification and StabilityFrancoNo ratings yet
- 7 Rotational-MechanicsExercise PDFDocument83 pages7 Rotational-MechanicsExercise PDFAs yyNo ratings yet
- Engineering College: Course FileDocument2 pagesEngineering College: Course Filevenkateshyadav2116No ratings yet
- Fluid MechanicsDocument55 pagesFluid MechanicsRixzyli Coqui SalcedoNo ratings yet
- Chapter 10 - Rock FoundationsDocument16 pagesChapter 10 - Rock FoundationsLupyana wa LupyanaNo ratings yet
- Problems Chapter 2Document26 pagesProblems Chapter 2Babar Ali100% (1)





















































































Download as ppt, pdf, or txt
You might also like
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesAdrian ArasuNo ratings yet
- Maths Project-Conic SectionsDocument12 pagesMaths Project-Conic Sectionsapi-24745075689% (9)
- Ast351 3.2.6Document15 pagesAst351 3.2.6rkshwh1978No ratings yet
- Ast351 3.2.3Document12 pagesAst351 3.2.3rkshwh1978No ratings yet
- Ast351 3.2.8Document12 pagesAst351 3.2.8rkshwh1978No ratings yet
- Ast351 3.2.7Document10 pagesAst351 3.2.7rkshwh1978No ratings yet
- Ast351 3.2.2Document14 pagesAst351 3.2.2rkshwh1978No ratings yet
- Ast351 3.1.6Document16 pagesAst351 3.1.6rkshwh1978No ratings yet
- NAV 224 PPT Semi Final Week 1 2Document60 pagesNAV 224 PPT Semi Final Week 1 2Jethro Lars UmbaoNo ratings yet
- Satellite Parameters Trajectories Module1Document94 pagesSatellite Parameters Trajectories Module1Gahan A V GowdaNo ratings yet
- Flow Simulation Over Re-Entry Bodies at Supersonic & Hypersonic SpeedsDocument6 pagesFlow Simulation Over Re-Entry Bodies at Supersonic & Hypersonic SpeedsIJERDNo ratings yet
- Vector GeometryDocument6 pagesVector GeometryMohamed EmadNo ratings yet
- Expt Projectile MotionDocument6 pagesExpt Projectile MotionGeorgette RepunteNo ratings yet
- Orbit Maneuvers - Reference Material PDFDocument27 pagesOrbit Maneuvers - Reference Material PDFPARI VERMA 20BAS10054No ratings yet
- Lunar TrajectoriesDocument19 pagesLunar TrajectoriesAdrian ArasuNo ratings yet
- Ballistic Missile TrajectoriesDocument48 pagesBallistic Missile TrajectoriesJunnuNo ratings yet
- A Geometrical Background For de Sitter's World by H.S.M. CoxeterDocument13 pagesA Geometrical Background For de Sitter's World by H.S.M. CoxeterTomás CampoNo ratings yet
- Proyección HexagonalDocument17 pagesProyección HexagonalHenry Castro ArandaNo ratings yet
- 1p1 2013 14 Mechanics Examples Paper 1Document5 pages1p1 2013 14 Mechanics Examples Paper 1Gabriel HoNo ratings yet
- Survey of Orbital Dynamics of Space Rendezvous VehiclesDocument14 pagesSurvey of Orbital Dynamics of Space Rendezvous VehiclesSarfaraz Nawaz ShahaNo ratings yet
- Ast351 3.2.1Document13 pagesAst351 3.2.1rkshwh1978No ratings yet
- A Rolling Sphere ExperimentDocument3 pagesA Rolling Sphere ExperimentNazareno Getter Ferreira de MedeirosNo ratings yet
- Ballistic Missile Trajectory Prediction Using A State Transition MatrixDocument16 pagesBallistic Missile Trajectory Prediction Using A State Transition MatrixNeetu SharmaNo ratings yet
- Survey Methods CalculationsDocument15 pagesSurvey Methods CalculationsHamed YousifNo ratings yet
- Lecture 1.1 Stereonets Intro Extra Text PDFDocument4 pagesLecture 1.1 Stereonets Intro Extra Text PDFBradley D'souzaNo ratings yet
- Adc Module 4Document51 pagesAdc Module 421951a2104No ratings yet
- Geogebra Cycloid PDFDocument20 pagesGeogebra Cycloid PDFJimNo ratings yet
- I - Sustainability Development Goal:: Title: Point of Contact & Email: Co-Authors: OrganizationDocument5 pagesI - Sustainability Development Goal:: Title: Point of Contact & Email: Co-Authors: OrganizationFahim MunawarNo ratings yet
- Solid Angle - Wikipedia, The Free EncyclopediaDocument8 pagesSolid Angle - Wikipedia, The Free Encyclopediayerlis21No ratings yet
- AS3050 - Assignment 3 - S-C Att Dyn - Orb MechDocument2 pagesAS3050 - Assignment 3 - S-C Att Dyn - Orb MechSneakyRiderNo ratings yet
- Motion in Two DimensionsDocument37 pagesMotion in Two DimensionsTABIBI11No ratings yet
- Mekanika Benda Langit - Gerak Dalam Orbit & Transfer OrbitDocument30 pagesMekanika Benda Langit - Gerak Dalam Orbit & Transfer OrbitafaqihudinNo ratings yet
- Equations of Motion of A Spin-Stabilized Projectile For Flight Stability TestingDocument12 pagesEquations of Motion of A Spin-Stabilized Projectile For Flight Stability TestingnanocardosoNo ratings yet
- Gravitational WellDocument8 pagesGravitational WellIJRASETPublicationsNo ratings yet
- TO TO: Application of The Leading-Edge-Suction Analogy of Vortex Lift The Drag Due Lift Sharp-Edge Delta WingsDocument17 pagesTO TO: Application of The Leading-Edge-Suction Analogy of Vortex Lift The Drag Due Lift Sharp-Edge Delta WingsAnders OlofssonNo ratings yet
- Surveying Lab IIDocument35 pagesSurveying Lab IIfaiz19aaNo ratings yet
- CH - 4 Motion in A PlaneDocument41 pagesCH - 4 Motion in A PlaneishayanarahtNo ratings yet
- MotioninAPlane Paper 01Document9 pagesMotioninAPlane Paper 01nishantsingh232009No ratings yet
- Orbital Mechanics: Conic SectionsDocument22 pagesOrbital Mechanics: Conic Sectionsoluwatosin PereiraNo ratings yet
- Nasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsDocument16 pagesNasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsAngel Villalonga MoralesNo ratings yet
- Space DynamicsDocument4 pagesSpace DynamicsShubham ShekharNo ratings yet
- 5 CE222F-18 Fieldworks 5 - Reverse CurveDocument8 pages5 CE222F-18 Fieldworks 5 - Reverse CurveJoana Marie RemoNo ratings yet
- NASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible FlowDocument79 pagesNASA Report - Theory For Computing Span Loads and Stability Derivatives Due To Side Slip, Yawing, and Rolling For Wings in Subsonic Compressible Flowmssj87No ratings yet
- Polar Equations of Conics: Alternative Definition of ConicDocument7 pagesPolar Equations of Conics: Alternative Definition of ConicBeto LangNo ratings yet
- 2013 1 BaranowskiDocument13 pages2013 1 Baranowskipaulo gontranNo ratings yet
- Balistica en InglesDocument59 pagesBalistica en Inglesmatias primeroNo ratings yet
- Gap and Stagger Effects On Biplanes With End Plates: The University of Dayton, Dayton, OH 45469-0238Document13 pagesGap and Stagger Effects On Biplanes With End Plates: The University of Dayton, Dayton, OH 45469-0238SubhasreeNo ratings yet
- Azimuth Method For Ship Position in Celestial NavigationDocument8 pagesAzimuth Method For Ship Position in Celestial NavigationVen TvNo ratings yet
- Mat11 PDFDocument13 pagesMat11 PDFRaquel Martins E SilvaNo ratings yet
- Motion in 2 DimensionsDocument31 pagesMotion in 2 DimensionsAngilyn LumabasNo ratings yet
- Module1 - Satellite Communication VTU 7th SemDocument127 pagesModule1 - Satellite Communication VTU 7th Semrohan gowdaNo ratings yet
- Pancharatnam Phase ManualDocument8 pagesPancharatnam Phase ManualPratik PatnaikNo ratings yet
- Vertical Angles Deviations of The Vertical and AdjustmentDocument36 pagesVertical Angles Deviations of The Vertical and AdjustmentjoaosevanNo ratings yet
- Aerodynamic Centers of Arbitrary Airfoils Below StallDocument42 pagesAerodynamic Centers of Arbitrary Airfoils Below StallJared EnocNo ratings yet
- Explain Quantum Physics With a Single-Particle in Motion: Anharmonic OscillatorFrom EverandExplain Quantum Physics With a Single-Particle in Motion: Anharmonic OscillatorNo ratings yet
- Curvilinear Perspective: Exploring Depth Perception in Computer VisionFrom EverandCurvilinear Perspective: Exploring Depth Perception in Computer VisionNo ratings yet
- Elementary Positional Astronomy Supported by PC Software ProgramsFrom EverandElementary Positional Astronomy Supported by PC Software ProgramsRating: 5 out of 5 stars5/5 (1)
- Ast351 3.1.6Document16 pagesAst351 3.1.6rkshwh1978No ratings yet
- Ast351 3.2.7Document10 pagesAst351 3.2.7rkshwh1978No ratings yet
- Ast351 3.2.8Document12 pagesAst351 3.2.8rkshwh1978No ratings yet
- Ast351 3.2.2Document14 pagesAst351 3.2.2rkshwh1978No ratings yet
- BSECE 2018 2019 Curriculum FlowchartDocument1 pageBSECE 2018 2019 Curriculum Flowchartstephen villaruzNo ratings yet
- Mechanical Performance of A New Type of Earth Masonry PDFDocument13 pagesMechanical Performance of A New Type of Earth Masonry PDFFarida Diab SarmoukNo ratings yet
- Self-Aerated Flows On Chutes and SpillwaysDocument31 pagesSelf-Aerated Flows On Chutes and SpillwaysdjajadjajaNo ratings yet
- Shear Test For Rock PDFDocument7 pagesShear Test For Rock PDFAnonymous v1blzDsEWANo ratings yet
- Agitator Power Requirement and Mixing Intensity CalculationDocument28 pagesAgitator Power Requirement and Mixing Intensity Calculationpankit mehtaNo ratings yet
- Heat Flow Analysis of Cooling Pipes in Young Hardening ConcreteDocument40 pagesHeat Flow Analysis of Cooling Pipes in Young Hardening ConcreteTao YinNo ratings yet
- First Semester: Faculty of Engineering Department of Mechanical EngineeringDocument27 pagesFirst Semester: Faculty of Engineering Department of Mechanical Engineeringozoemena29No ratings yet
- Fluid Report 2 1Document10 pagesFluid Report 2 1Jin AhmedNo ratings yet
- Quantum Mechanics Angular MomentumDocument13 pagesQuantum Mechanics Angular MomentumTo Get HerNo ratings yet
- Acoustic Waves PDFDocument479 pagesAcoustic Waves PDFRAUL EDUARDO GUTIERREZ COITIÑONo ratings yet
- Unit 3 Analysis Arches: StructureDocument22 pagesUnit 3 Analysis Arches: Structurevishnu vijayanNo ratings yet
- Lee Method7831Document6 pagesLee Method7831Priya BharadwajNo ratings yet
- Aristotelian and Galilean Views On MotionDocument26 pagesAristotelian and Galilean Views On MotionMARIA BELENDA GALLEGANo ratings yet
- StaticsDocument30 pagesStaticsJm Beja100% (1)
- Tensile Test Lap ReportDocument11 pagesTensile Test Lap ReportApostrophe Fareez ImprezzaNo ratings yet
- CFD Assignment ADocument3 pagesCFD Assignment APeter WapadaerNo ratings yet
- Structural MechanicsDocument9 pagesStructural MechanicsRoshan RawalNo ratings yet
- Fluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Document22 pagesFluent-Fsi 14.0 ws3 Hyperelastic Flap Part1Raúl Sánchez100% (1)
- Laboratory For TractionDocument13 pagesLaboratory For TractionsiritapeNo ratings yet
- RILEM TC 162-TDF Test and Design Methods For SFRCDocument8 pagesRILEM TC 162-TDF Test and Design Methods For SFRCDan MaceNo ratings yet
- Journal of Pipeline Science and Engineering: E. Fathi, S.H. HashemiDocument8 pagesJournal of Pipeline Science and Engineering: E. Fathi, S.H. Hashemiargentino_ar01No ratings yet
- Problem 548Document14 pagesProblem 548mike jobernard f. solangonNo ratings yet
- A Computer Method For Nonlinear Inelastic Analysis of 3D Composite Steel-Concrete Frame StructuresDocument28 pagesA Computer Method For Nonlinear Inelastic Analysis of 3D Composite Steel-Concrete Frame StructuresDalilah PiresNo ratings yet
- Electroacoustic Resonators: System Identification and StabilityDocument8 pagesElectroacoustic Resonators: System Identification and StabilityFrancoNo ratings yet
- 7 Rotational-MechanicsExercise PDFDocument83 pages7 Rotational-MechanicsExercise PDFAs yyNo ratings yet
- Engineering College: Course FileDocument2 pagesEngineering College: Course Filevenkateshyadav2116No ratings yet
- Fluid MechanicsDocument55 pagesFluid MechanicsRixzyli Coqui SalcedoNo ratings yet
- Chapter 10 - Rock FoundationsDocument16 pagesChapter 10 - Rock FoundationsLupyana wa LupyanaNo ratings yet
- Problems Chapter 2Document26 pagesProblems Chapter 2Babar Ali100% (1)