
Kinematics Lec 3
Kinematics Lec 3
You might also like
- Technical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Document80 pagesTechnical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Nelson Piquet Souto Maior100% (1)
- Sans 1200 HDocument3 pagesSans 1200 HfilipeNo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet
- S4H - 074 How To Approach Fit To Standard Analysis - CloudDocument44 pagesS4H - 074 How To Approach Fit To Standard Analysis - CloudRaymundo PiresNo ratings yet
- ElastisiteDocument2 pagesElastisiteEray KoçNo ratings yet
- Relative Motion PDFDocument36 pagesRelative Motion PDFAhmad RidhuanNo ratings yet
- Kinematics Lec 1Document18 pagesKinematics Lec 1saadbutt43215No ratings yet
- Vector Mechanics For Engineers: Dynamics Vector Mechanics For Engineers: DynamicsDocument3 pagesVector Mechanics For Engineers: Dynamics Vector Mechanics For Engineers: Dynamicscarl domingoNo ratings yet
- Kinematics of Particles Part 3Document28 pagesKinematics of Particles Part 3franciasalcedo132No ratings yet
- Dynamics11lecture PDFDocument89 pagesDynamics11lecture PDFEngra FithreeaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument89 pagesDynamics: Vector Mechanics For EngineersEngra FithreeaNo ratings yet
- CH 11Document62 pagesCH 11Abdel Naser Abu RabeNo ratings yet
- Dynamics - Chapter 11Document51 pagesDynamics - Chapter 11Hamza PagaNo ratings yet
- Presentacion Capitulo 11Document49 pagesPresentacion Capitulo 11Molina GabrielaNo ratings yet
- Lecture 20-Kinematics of A Particle2Document31 pagesLecture 20-Kinematics of A Particle2Vasanthi ChitturiNo ratings yet
- Chapter 11 ModDocument96 pagesChapter 11 ModMani SarthakNo ratings yet
- Kinematics Lec 2Document21 pagesKinematics Lec 2saadbutt43215No ratings yet
- 1-Kinematics of Particles معدلة-1Document29 pages1-Kinematics of Particles معدلة-1a42048517No ratings yet
- Dynamics: Vector Mechanics For EngineersDocument25 pagesDynamics: Vector Mechanics For EngineersJeff Manalo SaligumbaNo ratings yet
- Dynamics: Kinematics of Rigid BodiesDocument43 pagesDynamics: Kinematics of Rigid BodiesDamla AltasNo ratings yet
- Dynamics - Chapter 15Document54 pagesDynamics - Chapter 15Hamza PagaNo ratings yet
- BeerVM11e PPT Ch15Document110 pagesBeerVM11e PPT Ch15brayanNo ratings yet
- 15 Dynamics LectureDocument90 pages15 Dynamics Lecturechalove2uNo ratings yet
- Relative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsDocument40 pagesRelative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsHalaaNo ratings yet
- Chương 07Document39 pagesChương 07Nguyễn TrườngNo ratings yet
- Dynamics 15 LectureDocument106 pagesDynamics 15 LectureAbigail Joy AbingNo ratings yet
- Dynamics - Chapter 15 (Beer7)Document64 pagesDynamics - Chapter 15 (Beer7)api-3709496100% (3)
- Dynamics - Chapter 11 (Beer7)Document49 pagesDynamics - Chapter 11 (Beer7)api-370949667% (3)
- Dynamics: Vector Mechanics For EngineersDocument61 pagesDynamics: Vector Mechanics For Engineersgerango2010No ratings yet
- 11 Lecture PPT Rectilinear Motion PDFDocument42 pages11 Lecture PPT Rectilinear Motion PDFЦедіе РамосNo ratings yet
- MEC420 - 4 - Kinematics of RBDocument66 pagesMEC420 - 4 - Kinematics of RBsimon georgeNo ratings yet
- Physics 106: Mechanics: Wenda CaoDocument26 pagesPhysics 106: Mechanics: Wenda Caosaeed al-zahraniNo ratings yet
- Dynamics 15 LectureDocument106 pagesDynamics 15 Lecturelalo RodriguezNo ratings yet
- MEC420 - Kinematics of ParticlesDocument55 pagesMEC420 - Kinematics of ParticlesWaIe AzfarNo ratings yet
- Week 2 Kinematics of Particles (Relative Motion) - Ch11 - MAC-AUG 2024Document35 pagesWeek 2 Kinematics of Particles (Relative Motion) - Ch11 - MAC-AUG 2024Raichii MisakiNo ratings yet
- Chapter 2Document107 pagesChapter 2Bryan IgnacioNo ratings yet
- Week 3 Kinematics of Particles (Curvilinear Motion of Particles)Document69 pagesWeek 3 Kinematics of Particles (Curvilinear Motion of Particles)Ainur NasuhaNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- MEC420 - 2 - Kinetics of Particles - Force - AccDocument39 pagesMEC420 - 2 - Kinetics of Particles - Force - Accsimon georgeNo ratings yet
- Vector Algebra: - Coordinates in SpaceDocument102 pagesVector Algebra: - Coordinates in SpaceAli HassenNo ratings yet
- Module 1 (Physics)Document120 pagesModule 1 (Physics)Adabala Durgarao NaiduNo ratings yet
- Robot Dynamics PDFDocument56 pagesRobot Dynamics PDFPuru GaurNo ratings yet
- Lesson 3 Vector MultiplicationDocument25 pagesLesson 3 Vector MultiplicationKing HarlequinNo ratings yet
- Unit 4 (Velocity and Static Force Analysis)Document42 pagesUnit 4 (Velocity and Static Force Analysis)Meenakshi PriyaNo ratings yet
- Kinematics of Rigid Bodies1Document109 pagesKinematics of Rigid Bodies1Clackfuik12No ratings yet
- Vector Operation in Analytical and Graphical MethodDocument32 pagesVector Operation in Analytical and Graphical MethodJC ZayasNo ratings yet
- Chen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Document308 pagesChen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Stubby DubNo ratings yet
- Dynamics: Kinematics of Rigid BodiesDocument12 pagesDynamics: Kinematics of Rigid BodiesAizuddinNo ratings yet
- (@TEAMFLOOD) Rotational Motion - Aakash RM Modules PDFDocument58 pages(@TEAMFLOOD) Rotational Motion - Aakash RM Modules PDFVansh Gupta100% (1)
- Physics Theory Class 11Document102 pagesPhysics Theory Class 11Mithul VPNo ratings yet
- USS Physics - 220720 - 150517Document37 pagesUSS Physics - 220720 - 1505171036 - E - Yash Choudhary - XINo ratings yet
- USS Physics - 1Document75 pagesUSS Physics - 1Aryan singhNo ratings yet
- Chapter - 1 Vector Analysis PDFDocument39 pagesChapter - 1 Vector Analysis PDFcaleb100% (1)
- Lect02 PostDocument26 pagesLect02 PostRey PeñarandaNo ratings yet
- Unit1 Mec107 PDFDocument49 pagesUnit1 Mec107 PDFPrashant PandeyNo ratings yet
- Multibody Simulation of A Freight Bogie With Friction DampersDocument10 pagesMultibody Simulation of A Freight Bogie With Friction DampersGermán GoñiNo ratings yet
- Chapter 03Document52 pagesChapter 03anthonyNo ratings yet
- Choice of Coordinate System: Chapter 2 Kinematics of Particles Nslating Relative Motion RA .Document9 pagesChoice of Coordinate System: Chapter 2 Kinematics of Particles Nslating Relative Motion RA .Rodrigo LindaNo ratings yet
- NaveedGhani 2986 17586 3 Chapter03Document43 pagesNaveedGhani 2986 17586 3 Chapter03Muhammad Ahmed AsimNo ratings yet
- CHAP12 Kinetics of Particles Newtons2Law PDFDocument38 pagesCHAP12 Kinetics of Particles Newtons2Law PDFwahidNo ratings yet
- Chapter 7 - Kinematics of ParticlesDocument26 pagesChapter 7 - Kinematics of ParticlesrushdiNo ratings yet
- PHY SN M05 L01 685504 Digital TEDocument7 pagesPHY SN M05 L01 685504 Digital TERebeca RiveraNo ratings yet
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Reflection To The Librarians CPDDocument2 pagesReflection To The Librarians CPDsarambalaNo ratings yet
- Battery Soc Prediction JournalDocument12 pagesBattery Soc Prediction JournalketamencoNo ratings yet
- Group DynamicsDocument27 pagesGroup DynamicsJoyce Angelica MendigorinNo ratings yet
- Manual Serviço - Aiwa NSX-D77, NSX-T76, NSX-T77Document48 pagesManual Serviço - Aiwa NSX-D77, NSX-T76, NSX-T77fabioferraoNo ratings yet
- Biology, Ecology, and Management of The Pea Weevil, Bruchus Pisorum (Coleoptera: Chrysomelidae)Document12 pagesBiology, Ecology, and Management of The Pea Weevil, Bruchus Pisorum (Coleoptera: Chrysomelidae)Alexandra-Ana-Maria VulpeNo ratings yet
- Impact of Artificial Intellgence in Education SectorDocument9 pagesImpact of Artificial Intellgence in Education Sectorsravi271No ratings yet
- Nanofiltration - WikipediaDocument7 pagesNanofiltration - WikipediaSrinivas DsNo ratings yet
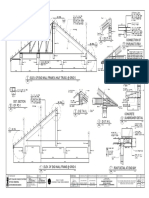
- Detail 6 Connection of Purlins To Rb-1 9Document1 pageDetail 6 Connection of Purlins To Rb-1 9Fritz NatividadNo ratings yet
- Process StrategyDocument65 pagesProcess StrategyPoojitha VallabhaneniNo ratings yet
- ASCE PipelinesbrochureDocument2 pagesASCE Pipelinesbrochurespringtide2722No ratings yet
- Solution Chapter 4Document11 pagesSolution Chapter 4accounts 3 lifeNo ratings yet
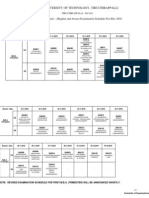
- Anna University of Technology, TiruchirappalliDocument2 pagesAnna University of Technology, TiruchirappallisanjeevrksNo ratings yet
- Bestiary of The Rosewood Highlands Draft 1-4-08!07!19Document82 pagesBestiary of The Rosewood Highlands Draft 1-4-08!07!19Stefano Chiaramonti100% (2)
- Standard Kessel Cat - Gral.Document40 pagesStandard Kessel Cat - Gral.Marcelo ResckNo ratings yet
- AVCN1 Full BDocument395 pagesAVCN1 Full BPhương TrungNo ratings yet
- 접속사 모음 1 PDFDocument2 pages접속사 모음 1 PDF김승찬No ratings yet
- What Is Spend AnalysisDocument35 pagesWhat Is Spend AnalysisMahesh NaiduNo ratings yet
- Mechanism of Titanium Sponge Formation in The Kroll Reduction ReactorDocument11 pagesMechanism of Titanium Sponge Formation in The Kroll Reduction ReactorSrinivasulu PuduNo ratings yet
- Sarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliDocument4 pagesSarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliKharylle AgnirNo ratings yet
- Valeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Document11 pagesValeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Philip Duvan FernandezNo ratings yet
- Prelim ProjectDocument8 pagesPrelim ProjectBlezel Mae AlzagaNo ratings yet
- 305-1-Seepage Analysis Through Zoned Anisotropic Soil by Computer, Geoffrey TomlinDocument11 pages305-1-Seepage Analysis Through Zoned Anisotropic Soil by Computer, Geoffrey Tomlinد.م. محمد الطاهرNo ratings yet
- Cinnamon Contact StomatitisDocument2 pagesCinnamon Contact StomatitisDwiNo ratings yet
- Gracie Royce - Gracie Charles - Brazilian Jiu-Jitsu Self-Defense TechniquesDocument245 pagesGracie Royce - Gracie Charles - Brazilian Jiu-Jitsu Self-Defense TechniquesPedro MarizNo ratings yet
- HIVER Waivers sp22 Fady ElmessyDocument2 pagesHIVER Waivers sp22 Fady ElmessyFady Ezzat 1No ratings yet
- Builder - PDF (China Substitution)Document11 pagesBuilder - PDF (China Substitution)Finsen SooNo ratings yet


















































































Download as pptx, pdf, or txt
You might also like
- Technical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Document80 pagesTechnical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Nelson Piquet Souto Maior100% (1)
- Sans 1200 HDocument3 pagesSans 1200 HfilipeNo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet
- S4H - 074 How To Approach Fit To Standard Analysis - CloudDocument44 pagesS4H - 074 How To Approach Fit To Standard Analysis - CloudRaymundo PiresNo ratings yet
- ElastisiteDocument2 pagesElastisiteEray KoçNo ratings yet
- Relative Motion PDFDocument36 pagesRelative Motion PDFAhmad RidhuanNo ratings yet
- Kinematics Lec 1Document18 pagesKinematics Lec 1saadbutt43215No ratings yet
- Vector Mechanics For Engineers: Dynamics Vector Mechanics For Engineers: DynamicsDocument3 pagesVector Mechanics For Engineers: Dynamics Vector Mechanics For Engineers: Dynamicscarl domingoNo ratings yet
- Kinematics of Particles Part 3Document28 pagesKinematics of Particles Part 3franciasalcedo132No ratings yet
- Dynamics11lecture PDFDocument89 pagesDynamics11lecture PDFEngra FithreeaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument89 pagesDynamics: Vector Mechanics For EngineersEngra FithreeaNo ratings yet
- CH 11Document62 pagesCH 11Abdel Naser Abu RabeNo ratings yet
- Dynamics - Chapter 11Document51 pagesDynamics - Chapter 11Hamza PagaNo ratings yet
- Presentacion Capitulo 11Document49 pagesPresentacion Capitulo 11Molina GabrielaNo ratings yet
- Lecture 20-Kinematics of A Particle2Document31 pagesLecture 20-Kinematics of A Particle2Vasanthi ChitturiNo ratings yet
- Chapter 11 ModDocument96 pagesChapter 11 ModMani SarthakNo ratings yet
- Kinematics Lec 2Document21 pagesKinematics Lec 2saadbutt43215No ratings yet
- 1-Kinematics of Particles معدلة-1Document29 pages1-Kinematics of Particles معدلة-1a42048517No ratings yet
- Dynamics: Vector Mechanics For EngineersDocument25 pagesDynamics: Vector Mechanics For EngineersJeff Manalo SaligumbaNo ratings yet
- Dynamics: Kinematics of Rigid BodiesDocument43 pagesDynamics: Kinematics of Rigid BodiesDamla AltasNo ratings yet
- Dynamics - Chapter 15Document54 pagesDynamics - Chapter 15Hamza PagaNo ratings yet
- BeerVM11e PPT Ch15Document110 pagesBeerVM11e PPT Ch15brayanNo ratings yet
- 15 Dynamics LectureDocument90 pages15 Dynamics Lecturechalove2uNo ratings yet
- Relative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsDocument40 pagesRelative Motion Dr. Hassan Ali: ENGD1106 Mechanical Principles-DynamicsHalaaNo ratings yet
- Chương 07Document39 pagesChương 07Nguyễn TrườngNo ratings yet
- Dynamics 15 LectureDocument106 pagesDynamics 15 LectureAbigail Joy AbingNo ratings yet
- Dynamics - Chapter 15 (Beer7)Document64 pagesDynamics - Chapter 15 (Beer7)api-3709496100% (3)
- Dynamics - Chapter 11 (Beer7)Document49 pagesDynamics - Chapter 11 (Beer7)api-370949667% (3)
- Dynamics: Vector Mechanics For EngineersDocument61 pagesDynamics: Vector Mechanics For Engineersgerango2010No ratings yet
- 11 Lecture PPT Rectilinear Motion PDFDocument42 pages11 Lecture PPT Rectilinear Motion PDFЦедіе РамосNo ratings yet
- MEC420 - 4 - Kinematics of RBDocument66 pagesMEC420 - 4 - Kinematics of RBsimon georgeNo ratings yet
- Physics 106: Mechanics: Wenda CaoDocument26 pagesPhysics 106: Mechanics: Wenda Caosaeed al-zahraniNo ratings yet
- Dynamics 15 LectureDocument106 pagesDynamics 15 Lecturelalo RodriguezNo ratings yet
- MEC420 - Kinematics of ParticlesDocument55 pagesMEC420 - Kinematics of ParticlesWaIe AzfarNo ratings yet
- Week 2 Kinematics of Particles (Relative Motion) - Ch11 - MAC-AUG 2024Document35 pagesWeek 2 Kinematics of Particles (Relative Motion) - Ch11 - MAC-AUG 2024Raichii MisakiNo ratings yet
- Chapter 2Document107 pagesChapter 2Bryan IgnacioNo ratings yet
- Week 3 Kinematics of Particles (Curvilinear Motion of Particles)Document69 pagesWeek 3 Kinematics of Particles (Curvilinear Motion of Particles)Ainur NasuhaNo ratings yet
- Kinematics of Particles:: Space Curvilinear MotionDocument14 pagesKinematics of Particles:: Space Curvilinear MotionLady MendozaNo ratings yet
- MEC420 - 2 - Kinetics of Particles - Force - AccDocument39 pagesMEC420 - 2 - Kinetics of Particles - Force - Accsimon georgeNo ratings yet
- Vector Algebra: - Coordinates in SpaceDocument102 pagesVector Algebra: - Coordinates in SpaceAli HassenNo ratings yet
- Module 1 (Physics)Document120 pagesModule 1 (Physics)Adabala Durgarao NaiduNo ratings yet
- Robot Dynamics PDFDocument56 pagesRobot Dynamics PDFPuru GaurNo ratings yet
- Lesson 3 Vector MultiplicationDocument25 pagesLesson 3 Vector MultiplicationKing HarlequinNo ratings yet
- Unit 4 (Velocity and Static Force Analysis)Document42 pagesUnit 4 (Velocity and Static Force Analysis)Meenakshi PriyaNo ratings yet
- Kinematics of Rigid Bodies1Document109 pagesKinematics of Rigid Bodies1Clackfuik12No ratings yet
- Vector Operation in Analytical and Graphical MethodDocument32 pagesVector Operation in Analytical and Graphical MethodJC ZayasNo ratings yet
- Chen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Document308 pagesChen Guang, - Yap Fook Fah - An Introduction To Planar Dynamics-Cengage Learning Asia (2014)Stubby DubNo ratings yet
- Dynamics: Kinematics of Rigid BodiesDocument12 pagesDynamics: Kinematics of Rigid BodiesAizuddinNo ratings yet
- (@TEAMFLOOD) Rotational Motion - Aakash RM Modules PDFDocument58 pages(@TEAMFLOOD) Rotational Motion - Aakash RM Modules PDFVansh Gupta100% (1)
- Physics Theory Class 11Document102 pagesPhysics Theory Class 11Mithul VPNo ratings yet
- USS Physics - 220720 - 150517Document37 pagesUSS Physics - 220720 - 1505171036 - E - Yash Choudhary - XINo ratings yet
- USS Physics - 1Document75 pagesUSS Physics - 1Aryan singhNo ratings yet
- Chapter - 1 Vector Analysis PDFDocument39 pagesChapter - 1 Vector Analysis PDFcaleb100% (1)
- Lect02 PostDocument26 pagesLect02 PostRey PeñarandaNo ratings yet
- Unit1 Mec107 PDFDocument49 pagesUnit1 Mec107 PDFPrashant PandeyNo ratings yet
- Multibody Simulation of A Freight Bogie With Friction DampersDocument10 pagesMultibody Simulation of A Freight Bogie With Friction DampersGermán GoñiNo ratings yet
- Chapter 03Document52 pagesChapter 03anthonyNo ratings yet
- Choice of Coordinate System: Chapter 2 Kinematics of Particles Nslating Relative Motion RA .Document9 pagesChoice of Coordinate System: Chapter 2 Kinematics of Particles Nslating Relative Motion RA .Rodrigo LindaNo ratings yet
- NaveedGhani 2986 17586 3 Chapter03Document43 pagesNaveedGhani 2986 17586 3 Chapter03Muhammad Ahmed AsimNo ratings yet
- CHAP12 Kinetics of Particles Newtons2Law PDFDocument38 pagesCHAP12 Kinetics of Particles Newtons2Law PDFwahidNo ratings yet
- Chapter 7 - Kinematics of ParticlesDocument26 pagesChapter 7 - Kinematics of ParticlesrushdiNo ratings yet
- PHY SN M05 L01 685504 Digital TEDocument7 pagesPHY SN M05 L01 685504 Digital TERebeca RiveraNo ratings yet
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Reflection To The Librarians CPDDocument2 pagesReflection To The Librarians CPDsarambalaNo ratings yet
- Battery Soc Prediction JournalDocument12 pagesBattery Soc Prediction JournalketamencoNo ratings yet
- Group DynamicsDocument27 pagesGroup DynamicsJoyce Angelica MendigorinNo ratings yet
- Manual Serviço - Aiwa NSX-D77, NSX-T76, NSX-T77Document48 pagesManual Serviço - Aiwa NSX-D77, NSX-T76, NSX-T77fabioferraoNo ratings yet
- Biology, Ecology, and Management of The Pea Weevil, Bruchus Pisorum (Coleoptera: Chrysomelidae)Document12 pagesBiology, Ecology, and Management of The Pea Weevil, Bruchus Pisorum (Coleoptera: Chrysomelidae)Alexandra-Ana-Maria VulpeNo ratings yet
- Impact of Artificial Intellgence in Education SectorDocument9 pagesImpact of Artificial Intellgence in Education Sectorsravi271No ratings yet
- Nanofiltration - WikipediaDocument7 pagesNanofiltration - WikipediaSrinivas DsNo ratings yet
- Detail 6 Connection of Purlins To Rb-1 9Document1 pageDetail 6 Connection of Purlins To Rb-1 9Fritz NatividadNo ratings yet
- Process StrategyDocument65 pagesProcess StrategyPoojitha VallabhaneniNo ratings yet
- ASCE PipelinesbrochureDocument2 pagesASCE Pipelinesbrochurespringtide2722No ratings yet
- Solution Chapter 4Document11 pagesSolution Chapter 4accounts 3 lifeNo ratings yet
- Anna University of Technology, TiruchirappalliDocument2 pagesAnna University of Technology, TiruchirappallisanjeevrksNo ratings yet
- Bestiary of The Rosewood Highlands Draft 1-4-08!07!19Document82 pagesBestiary of The Rosewood Highlands Draft 1-4-08!07!19Stefano Chiaramonti100% (2)
- Standard Kessel Cat - Gral.Document40 pagesStandard Kessel Cat - Gral.Marcelo ResckNo ratings yet
- AVCN1 Full BDocument395 pagesAVCN1 Full BPhương TrungNo ratings yet
- 접속사 모음 1 PDFDocument2 pages접속사 모음 1 PDF김승찬No ratings yet
- What Is Spend AnalysisDocument35 pagesWhat Is Spend AnalysisMahesh NaiduNo ratings yet
- Mechanism of Titanium Sponge Formation in The Kroll Reduction ReactorDocument11 pagesMechanism of Titanium Sponge Formation in The Kroll Reduction ReactorSrinivasulu PuduNo ratings yet
- Sarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliDocument4 pagesSarrat National High School: Ragsak Ken Rag-Omi Ti Mangmuli Dagiti UmiliKharylle AgnirNo ratings yet
- Valeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Document11 pagesValeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Philip Duvan FernandezNo ratings yet
- Prelim ProjectDocument8 pagesPrelim ProjectBlezel Mae AlzagaNo ratings yet
- 305-1-Seepage Analysis Through Zoned Anisotropic Soil by Computer, Geoffrey TomlinDocument11 pages305-1-Seepage Analysis Through Zoned Anisotropic Soil by Computer, Geoffrey Tomlinد.م. محمد الطاهرNo ratings yet
- Cinnamon Contact StomatitisDocument2 pagesCinnamon Contact StomatitisDwiNo ratings yet
- Gracie Royce - Gracie Charles - Brazilian Jiu-Jitsu Self-Defense TechniquesDocument245 pagesGracie Royce - Gracie Charles - Brazilian Jiu-Jitsu Self-Defense TechniquesPedro MarizNo ratings yet
- HIVER Waivers sp22 Fady ElmessyDocument2 pagesHIVER Waivers sp22 Fady ElmessyFady Ezzat 1No ratings yet
- Builder - PDF (China Substitution)Document11 pagesBuilder - PDF (China Substitution)Finsen SooNo ratings yet