Download as pptx, pdf, or txt
You might also like
- Aerodynamics of Sailing YachtsDocument96 pagesAerodynamics of Sailing YachtsMarcelo MilicevickNo ratings yet
- Eto Coc Written Examination Questions & Answers Part-1Document84 pagesEto Coc Written Examination Questions & Answers Part-1saiful100% (4)
- Quick Guide: Inverex InverterDocument10 pagesQuick Guide: Inverex Invertersnaumanb50% (2)
- Circuito HidraulicoDocument18 pagesCircuito Hidraulicolull434100% (4)
- Denso Report FileDocument32 pagesDenso Report FileRahul Pandey75% (4)
- Selection of Materials For Frame of DroneDocument14 pagesSelection of Materials For Frame of DroneSuresh KumarNo ratings yet
- Session 4Document23 pagesSession 4konnecthumanityNo ratings yet
- WWW Droneybee ComDocument28 pagesWWW Droneybee CommiguelNo ratings yet
- 51 DFDFDocument28 pages51 DFDFKetutTomySuhariNo ratings yet
- Making of Micromouse: Amit Raj 2nd Yr ECE SASTRA UniversityDocument54 pagesMaking of Micromouse: Amit Raj 2nd Yr ECE SASTRA UniversityAmit Raj50% (2)
- Frequently Asked Questions About Power Inverters: 1. What Is A Power Inverter?Document4 pagesFrequently Asked Questions About Power Inverters: 1. What Is A Power Inverter?Charanjeet SinghNo ratings yet
- Manual - Quadcopters Review (Watermarked) PDFDocument28 pagesManual - Quadcopters Review (Watermarked) PDFQuads For Fun100% (3)
- Elect III Sem NotesDocument16 pagesElect III Sem NotesVijayakumar ArunachalamNo ratings yet
- Faq PDFDocument4 pagesFaq PDFAyoade Lanre BexNo ratings yet
- Readme ACIM Constant Parameter Model PDFDocument7 pagesReadme ACIM Constant Parameter Model PDFHandriToarPangkeregoNo ratings yet
- Air ClimberDocument2 pagesAir ClimberTheUnknown LyssNo ratings yet
- Viva Quastions SegwayDocument11 pagesViva Quastions SegwayEr Md AamirNo ratings yet
- II Unit Ind Robo-2020Document15 pagesII Unit Ind Robo-2020Tejas.C 4PS18ME091No ratings yet
- Robotics TutorialDocument5 pagesRobotics TutorialAbhigyan DattaNo ratings yet
- E BasicsDocument18 pagesE BasicsEnache Daniel-EmanuelNo ratings yet
- Battery Management Manual For Flexi Power Rectifier Rev ABDocument9 pagesBattery Management Manual For Flexi Power Rectifier Rev ABGömbicz GergelyNo ratings yet
- Complete Motor Guide For RoboticsDocument50 pagesComplete Motor Guide For RoboticsAngie100% (2)
- DIY Off Grid Solar System V20Document44 pagesDIY Off Grid Solar System V20Osman buğa100% (2)
- EI6402 Electrical Machines QbankDocument16 pagesEI6402 Electrical Machines QbankBabu SekarNo ratings yet
- Chapter 2 Components of LitebeeDocument26 pagesChapter 2 Components of LitebeeJimmyRoseNo ratings yet
- Experiment 8 Synchronous Motor - Part IDocument13 pagesExperiment 8 Synchronous Motor - Part IRoanaqul Islam PracchoNo ratings yet
- IFLY-4S Multi Rotor Copter: User ManualDocument25 pagesIFLY-4S Multi Rotor Copter: User ManualДмитрий100% (1)
- Classification of Excitation System - Power PlantsDocument8 pagesClassification of Excitation System - Power PlantsLakshmiNo ratings yet
- Design For Assembly and MaintainanceDocument12 pagesDesign For Assembly and MaintainancenevermoreNo ratings yet
- Portable Battery For Night PhotographyDocument16 pagesPortable Battery For Night PhotographyJoeDabidNo ratings yet
- MAHIDocument48 pagesMAHIRam Sharan PrajapatiNo ratings yet
- Reverse Power Protection of Alternator PDFDocument29 pagesReverse Power Protection of Alternator PDFjupiterox80% (5)
- Aircraft Electrical SystemsDocument14 pagesAircraft Electrical SystemsBarnister OngaroNo ratings yet
- CHAPTER 4 DroneDocument30 pagesCHAPTER 4 DroneZero MrNo ratings yet
- Synchronous Generator PHD Thesis 2014Document5 pagesSynchronous Generator PHD Thesis 2014melissalusternorman100% (2)
- TP32 Agricultural Drone User ManualDocument56 pagesTP32 Agricultural Drone User ManualDjawa DiningratNo ratings yet
- CSE444: Introduction To Robotics: Working With ActuatorsDocument16 pagesCSE444: Introduction To Robotics: Working With Actuatorstorunbd officialNo ratings yet
- 2-Basics Electronics TwoDocument42 pages2-Basics Electronics TwoOmar EzzNo ratings yet
- Titan ManualDocument17 pagesTitan ManualitzmehrcaNo ratings yet
- Triton EQ ManualDocument20 pagesTriton EQ ManualFrank PazNo ratings yet
- CZC7 Automatic Charger: Operating InstructionDocument10 pagesCZC7 Automatic Charger: Operating InstructionJavier VillelaNo ratings yet
- Inverter Circuit DiagramDocument30 pagesInverter Circuit DiagramBanyu Gea100% (1)
- Fortress Power Energy Storage Presentation 2019Document40 pagesFortress Power Energy Storage Presentation 2019Anthony StevenNo ratings yet
- Build Arduino Quadcopter With Complete Source Code and Circuit DiagramDocument3 pagesBuild Arduino Quadcopter With Complete Source Code and Circuit DiagramVimalNo ratings yet
- Manual TI02170 enDocument32 pagesManual TI02170 enharry programmerNo ratings yet
- Research Paper 3Document4 pagesResearch Paper 3sabeeh WaqasNo ratings yet
- Three-Phase Induction Motor Construction and Principle of OperationDocument9 pagesThree-Phase Induction Motor Construction and Principle of OperationAung Ko MinNo ratings yet
- Elct302group1 TechmanualDocument35 pagesElct302group1 Techmanualapi-384660200No ratings yet
- Willard Battery Selection Guide 2019 WebDocument138 pagesWillard Battery Selection Guide 2019 Webrudismith1No ratings yet
- Components A Glam Lik Kontrol UDocument167 pagesComponents A Glam Lik Kontrol UIonut Gabriel BujorNo ratings yet
- Ac Machines ModuleDocument42 pagesAc Machines ModuleFranzon MelecioNo ratings yet
- Articles - How Configure Battery BankDocument4 pagesArticles - How Configure Battery BankPieter FourieNo ratings yet
- UNIT1Document121 pagesUNIT1mancoding570No ratings yet
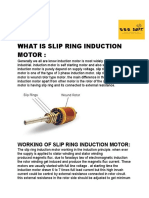
- Slip Ring and Squirrel Cage Induction MotorsDocument13 pagesSlip Ring and Squirrel Cage Induction MotorsPrem SagarNo ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- River 2 Max-20230127Document82 pagesRiver 2 Max-20230127rmsborgdorffwerkNo ratings yet
- Amd Apuntes FluidosDocument9 pagesAmd Apuntes Fluidosgarza_aNo ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- Battery System at 220Kv Substation Punnapra: Anakha.MDocument20 pagesBattery System at 220Kv Substation Punnapra: Anakha.MManu JosephNo ratings yet
- Control STUFF F-16C - D Fighting Falcon Flight Manual Pp28Document28 pagesControl STUFF F-16C - D Fighting Falcon Flight Manual Pp28ByronNo ratings yet
- Commercial GuideDocument121 pagesCommercial Guideaaa zzzNo ratings yet
- 4 Forces of FlightDocument2 pages4 Forces of FlightSenan ShahverdiyevNo ratings yet
- All ABC QuestionsDocument45 pagesAll ABC QuestionsOmar NegmNo ratings yet
- Comparison of The Linear and Nonlinear Equations of Motion - Aircraft Simulation - Aircraft Flight Mechanics by Harry Smith, PHDDocument12 pagesComparison of The Linear and Nonlinear Equations of Motion - Aircraft Simulation - Aircraft Flight Mechanics by Harry Smith, PHDhung dangNo ratings yet
- Chapter 1 Introduction To Vehicle DynamicsDocument20 pagesChapter 1 Introduction To Vehicle DynamicsWARRIOR GAMINGNo ratings yet
- Licentiate ThesisDocument116 pagesLicentiate Thesissoxisor130No ratings yet
- Os 105 Vessels and Transport To OffshoreDocument18 pagesOs 105 Vessels and Transport To OffshoreDerlin prince ThankarajNo ratings yet
- PPL Question Bank On Principles of Flight (MCQ and Descriptive)Document40 pagesPPL Question Bank On Principles of Flight (MCQ and Descriptive)Abedur Rahman KhanNo ratings yet
- INAV ModesDocument6 pagesINAV ModesBằng Trần DuyNo ratings yet
- Vehicle Dynamic Estimation With Road Bank Angle Consideration For Rollover Detection Theoretical and Experimental StudiesDocument20 pagesVehicle Dynamic Estimation With Road Bank Angle Consideration For Rollover Detection Theoretical and Experimental Studiesjwf98516No ratings yet
- Flight D. Cheat SheetDocument2 pagesFlight D. Cheat SheetIsaac PittmanNo ratings yet
- Capitulo 11 Seccion CiiDocument18 pagesCapitulo 11 Seccion CiiVictor TobosqueNo ratings yet
- Agard Ag 238Document244 pagesAgard Ag 238leonidNo ratings yet
- Design and Implementation of An Autopilot For UAVDocument38 pagesDesign and Implementation of An Autopilot For UAVUTKARSH ALSETNo ratings yet
- EC135 Classic B2 R06EN 05 SAS002BAutopilot - EncDocument169 pagesEC135 Classic B2 R06EN 05 SAS002BAutopilot - Encanulu7129No ratings yet
- PHD Thesis Siavash Maleki FinalDocument284 pagesPHD Thesis Siavash Maleki FinalLuigi Huaman TorresNo ratings yet
- Trailer Body With Translational and Rotational MotionDocument21 pagesTrailer Body With Translational and Rotational MotionvamsiNo ratings yet
- F-16 MATV Optimal Filght Controller Design Using Robust and Discrete Linear Quadratic Gaussian (RLQG) ControllerDocument142 pagesF-16 MATV Optimal Filght Controller Design Using Robust and Discrete Linear Quadratic Gaussian (RLQG) ControllerUTKARSH ALSETNo ratings yet
- Flight Demonstration Wind Tunnel Lab ReportDocument5 pagesFlight Demonstration Wind Tunnel Lab Reportromesaali23No ratings yet
- 3-Vehicle Equation of MotionDocument16 pages3-Vehicle Equation of MotionBira-aanuu SamuelNo ratings yet
- Dr.A.Relton M.A., PH.D.,: BISHOP HEBER COLLEGE (Autonomous)Document8 pagesDr.A.Relton M.A., PH.D.,: BISHOP HEBER COLLEGE (Autonomous)P.Jermi Arockia PravinNo ratings yet
- Calculation of The Longitudinal Stability DerivatiDocument7 pagesCalculation of The Longitudinal Stability DerivatittNo ratings yet
- ParachuteDocument86 pagesParachuteRoshan RohithNo ratings yet
- AIAA Paper Thesis Pepijn Post GraduationDocument35 pagesAIAA Paper Thesis Pepijn Post GraduationSamNo ratings yet
- PDF Aerodynamics Principles For Air Transport Pilots 1St Edition Rose G Davies Ebook Full ChapterDocument53 pagesPDF Aerodynamics Principles For Air Transport Pilots 1St Edition Rose G Davies Ebook Full Chapterlindsey.thomas555100% (7)
- Esdu CatalogueDocument105 pagesEsdu CatalogueMurat CelikNo ratings yet
- NX3-EVO UserguideDocument2 pagesNX3-EVO UserguideGORLA SANDEEP,MECH(19-23) Vel Tech, Chennai100% (1)
- C172 SOP June 2020Document13 pagesC172 SOP June 2020Peter Hoole-jacksonNo ratings yet