Download as pptx, pdf, or txt
You might also like
- Nuradi Maintain A Safe Engineering Watch - pdf-1Document74 pagesNuradi Maintain A Safe Engineering Watch - pdf-1Dimas wangsit indraprasti0% (5)
- Five Case StudiesDocument6 pagesFive Case Studiesbylen100% (1)
- Materi Interview Third OfficerDocument6 pagesMateri Interview Third OfficerFebri Nugraha100% (3)
- Actions To Protect and Safeguard All Persons On Board in EmergenciesDocument29 pagesActions To Protect and Safeguard All Persons On Board in EmergenciesnikoskarandinosNo ratings yet
- LSA Pocket Checklist PDFDocument18 pagesLSA Pocket Checklist PDFroy hara100% (3)
- Lake Victoria Maritime Safety RegulationsDocument98 pagesLake Victoria Maritime Safety RegulationspaulsonNo ratings yet
- The Embarkation Disembarkation of Pilots - Code Final PMSC SGDocument15 pagesThe Embarkation Disembarkation of Pilots - Code Final PMSC SGMarcoDekkerNo ratings yet
- OOW Oral NotesDocument185 pagesOOW Oral Notesgeorgesaguna100% (5)
- NAV 3 Lesson 5 Keeping A LogDocument8 pagesNAV 3 Lesson 5 Keeping A LogMico Santos100% (1)
- Ship Security Officer (Seagull) WorkbookDocument24 pagesShip Security Officer (Seagull) Workbookdr.robert.maluyaNo ratings yet
- 03 Watch Keeping and Global Security in ShippingDocument27 pages03 Watch Keeping and Global Security in ShippingOleg KuchorenkoNo ratings yet
- B Maritime Security Policy STSDocument58 pagesB Maritime Security Policy STSjarnail kalra100% (2)
- DW2 Module 8Document22 pagesDW2 Module 8Frednixen GapoyNo ratings yet
- ISM ElementsDocument56 pagesISM Elementsbergmannstrasse50% (2)
- Safe ManningDocument2 pagesSafe Manningzeropenn00No ratings yet
- Nav 327 SF WK 3 PPT Publications Used For Monitoring of The VoyageDocument20 pagesNav 327 SF WK 3 PPT Publications Used For Monitoring of The Voyageivan dave aliasotNo ratings yet
- Competency 2Document8 pagesCompetency 20669701809vlasaa2No ratings yet
- QSP 18Document11 pagesQSP 18raedNo ratings yet
- MSC 1-Circ 1592Document172 pagesMSC 1-Circ 1592Oleksii KuzmenkoNo ratings yet
- Guide of Inspection Life Boats by MCADocument38 pagesGuide of Inspection Life Boats by MCAChristopher Mohan Rao100% (1)
- Sip021 - Guidance On Safe Access To Fishing VesselsDocument20 pagesSip021 - Guidance On Safe Access To Fishing Vesselsfredspicer013No ratings yet
- Update On IMO Activities and Initiatives Relevant To WHTI ThemesDocument30 pagesUpdate On IMO Activities and Initiatives Relevant To WHTI Themesaloksahu1No ratings yet
- MGN 315Document10 pagesMGN 315griffpritchNo ratings yet
- BSMT ReviewerDocument18 pagesBSMT ReviewerTristan Kent PantaleonNo ratings yet
- SGN 077a - GMA Requirements For Safe Manning and Watchkeeping 24.08.20 PDFDocument6 pagesSGN 077a - GMA Requirements For Safe Manning and Watchkeeping 24.08.20 PDFvangeliskyriakos8998No ratings yet
- 10 Principles of Safe ManningDocument8 pages10 Principles of Safe ManningCatalin DorofteiNo ratings yet
- Dersnot 5519 1704143475Document66 pagesDersnot 5519 1704143475caglatas5No ratings yet
- Dersnot 4621 1605184092 PDFDocument73 pagesDersnot 4621 1605184092 PDFBatuhan Algür100% (1)
- Passage Planning - Solas RelatedDocument7 pagesPassage Planning - Solas RelatedPL BALASUBRAMANIANNo ratings yet
- Data Information Sheet 1.2.1 Part B Section 1Document29 pagesData Information Sheet 1.2.1 Part B Section 1Robert M. MaluyaNo ratings yet
- CH 04 Record KeepingDocument7 pagesCH 04 Record KeepingAmit PandeyNo ratings yet
- Oral-Preparation-Guide (Rifat Azad-Bma 49) PDFDocument105 pagesOral-Preparation-Guide (Rifat Azad-Bma 49) PDFTarek Aziz100% (2)
- 2m Orals 3Document191 pages2m Orals 3Ravi Singh100% (1)
- MSC 91-7-1 - Cruise Industry Operational Safety Review (CLIA)Document4 pagesMSC 91-7-1 - Cruise Industry Operational Safety Review (CLIA)ncharalaNo ratings yet
- A 890 Safe ManningDocument12 pagesA 890 Safe ManningNicholas NaidaNo ratings yet
- SC No 16 of 2010Document15 pagesSC No 16 of 2010Anil RainaNo ratings yet
- Bridge Procedures, Master Standing OrdersDocument49 pagesBridge Procedures, Master Standing Orderssimon_midjaja100% (1)
- Safety of Ships in YardDocument63 pagesSafety of Ships in YardPetar Aleksandrov100% (1)
- PSC Preparedness and Response TrainingDocument28 pagesPSC Preparedness and Response TrainingBuddhika Naveendra100% (2)
- Q. What Is SOLAS?: ObjectivesDocument16 pagesQ. What Is SOLAS?: ObjectivesBlue Hunter100% (1)
- MAR LAW Responsibilities Under SOLAS ConventionDocument38 pagesMAR LAW Responsibilities Under SOLAS Conventionnestor almeroNo ratings yet
- DMA - Guidance On Safety During DrillsDocument5 pagesDMA - Guidance On Safety During DrillsJosip Bhp GustinNo ratings yet
- GSK Chapter 5 SeamanshipDocument24 pagesGSK Chapter 5 SeamanshipMarian Visan100% (1)
- Understanding SolasDocument22 pagesUnderstanding Solas21amrikamaharajNo ratings yet
- Principles of Minimum Safe ManningDocument14 pagesPrinciples of Minimum Safe ManningeltioferdiNo ratings yet
- Solas 74Document15 pagesSolas 74Likhith LikhithNo ratings yet
- 1 Point: Appraisal Planning, Execution, Monitoring 4 Points AnswerDocument5 pages1 Point: Appraisal Planning, Execution, Monitoring 4 Points AnswerJncmbty vLoGsNo ratings yet
- Passage Planning AlessiDocument100 pagesPassage Planning Alessiardipangulihi100% (4)
- Chain RegisterDocument9 pagesChain RegisterReetam BoseNo ratings yet
- ISPS CodeDocument11 pagesISPS CodeRajagopalan GurumurthyNo ratings yet
- Survey SorularDocument4 pagesSurvey SorularMuhammed Yusuf KaplanNo ratings yet
- Rescue Boat Code of PracticeDocument123 pagesRescue Boat Code of PracticeAbdel Nasser Al-sheikh YousefNo ratings yet
- Appendix1 Syllabus Amsa Oral Exam Cert Competency Master Chief Mate 3000gtDocument4 pagesAppendix1 Syllabus Amsa Oral Exam Cert Competency Master Chief Mate 3000gtAadiraj SinghNo ratings yet
- General Principles For Ships Reporting System and With VTS ProceduresDocument12 pagesGeneral Principles For Ships Reporting System and With VTS ProceduresBerbaño, Jan Joshua100% (1)
- Procedure For Watchkeeping On Ships: Chapter 1 General Provisions 1. Scope of RegulationDocument17 pagesProcedure For Watchkeeping On Ships: Chapter 1 General Provisions 1. Scope of Regulationmohit shuklaNo ratings yet
- Learning Outcome 2 Marine Law Lesson 10Document26 pagesLearning Outcome 2 Marine Law Lesson 10ciprian predaNo ratings yet
- ISPS Code Awareness TrainingDocument57 pagesISPS Code Awareness Trainingdiegocely700615100% (1)
- Bridge ManagementDocument2 pagesBridge ManagementA.B.AkinsowonNo ratings yet
- International Regulations for Preventing Collisions at SeaFrom EverandInternational Regulations for Preventing Collisions at SeaNo ratings yet
- Encyclopaedia of International Aviation Law: Recueil Des Textes De Lois Relatifs AFrom EverandEncyclopaedia of International Aviation Law: Recueil Des Textes De Lois Relatifs ANo ratings yet
- The Diesel Engine and Its DevelopmentDocument33 pagesThe Diesel Engine and Its Developmentsevero97No ratings yet
- Materi 2. Organisasi Industri GalanganDocument20 pagesMateri 2. Organisasi Industri GalanganRizal RachmanNo ratings yet
- The-Maltese-Falcon BrochureDocument49 pagesThe-Maltese-Falcon BrochureUzumakiNo ratings yet
- 2017 List of All Ships Dismantled All Over The WorldDocument73 pages2017 List of All Ships Dismantled All Over The WorldThiago Castro RodriguesNo ratings yet
- Certificate of Watchkeeping (Deck)Document1 pageCertificate of Watchkeeping (Deck)Gopi KrishnanNo ratings yet
- Double Hull Tanker - Typical Transverse Bulkhead - IACS Rec.96Document6 pagesDouble Hull Tanker - Typical Transverse Bulkhead - IACS Rec.96danielNo ratings yet
- Admiralty Hall 1809Document121 pagesAdmiralty Hall 1809Akil BeyNo ratings yet
- Saipem Pres2Document45 pagesSaipem Pres2alexrodriguezabcNo ratings yet
- Metoda Tikaboo. Timp de Calitate Pentru ParintDocument2 pagesMetoda Tikaboo. Timp de Calitate Pentru ParintDragan Sorin0% (1)
- Development of Operational Limit Diagrams For Offshore Lifting ProceduresDocument10 pagesDevelopment of Operational Limit Diagrams For Offshore Lifting ProceduresLeonardo RoncettiNo ratings yet
- Simbologia ArcGISDocument613 pagesSimbologia ArcGISSergio ReyesNo ratings yet
- ZMA - Flag State Inspection Checklist FormDocument16 pagesZMA - Flag State Inspection Checklist Formmohamed abdallaNo ratings yet
- Q88 1. Vessel Description: April 11, 2023 Fortune YounginDocument6 pagesQ88 1. Vessel Description: April 11, 2023 Fortune Youngindesy yolandaNo ratings yet
- PDF Form: Submit A Ballast Water Management Report Via PDFDocument8 pagesPDF Form: Submit A Ballast Water Management Report Via PDFVan LaiNo ratings yet
- Rti Brochure Searox Technical Guidelines - Int - Eng PDFDocument116 pagesRti Brochure Searox Technical Guidelines - Int - Eng PDFAlexandre GomesNo ratings yet
- World Port IndexDocument281 pagesWorld Port Indexkylden100% (1)
- F-94 D 25-2020 Counterforces For Anchor Chain Cable (Repeated) 18.05.2020Document1 pageF-94 D 25-2020 Counterforces For Anchor Chain Cable (Repeated) 18.05.2020Gaurav MaithilNo ratings yet
- Unsworth Trans. vs. C.ADocument2 pagesUnsworth Trans. vs. C.AJohn Ray100% (1)
- AssignmentDocument4 pagesAssignmentNuel SorianoNo ratings yet
- Chipolbrok: KraszewskiDocument8 pagesChipolbrok: KraszewskiEdy GunawanNo ratings yet
- Cover Then That Entire Sample Bottles To Be Stowed in Such A Way To Prevent Movement. MSDS For The Samples To Be Available in The LockerDocument2 pagesCover Then That Entire Sample Bottles To Be Stowed in Such A Way To Prevent Movement. MSDS For The Samples To Be Available in The LockerTom AlexNo ratings yet
- YemenDocument13 pagesYemenAlin StanciuNo ratings yet
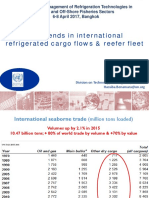
- Key Trends in International Refrigerated Cargo Flows & Reefer FleetDocument21 pagesKey Trends in International Refrigerated Cargo Flows & Reefer FleetMiguel Rodríguez SoutoNo ratings yet
- Transpo in PhilDocument31 pagesTranspo in PhilLevirolfDeJesusNo ratings yet
- Shadeed - MEAE - Dubai - UAEDocument1 pageShadeed - MEAE - Dubai - UAEEdiNo ratings yet
- Damen Stan Tender: General Deck Lay-OutDocument2 pagesDamen Stan Tender: General Deck Lay-Outvov1302No ratings yet
- Marpol Annex IIDocument67 pagesMarpol Annex IIDavor VidanNo ratings yet
- Equipment Sheet: Deep Water Anchor-Handling Tug, Supply VesselDocument3 pagesEquipment Sheet: Deep Water Anchor-Handling Tug, Supply VesselJeff TrinidadNo ratings yet