Download as pptx, pdf, or txt
You might also like
- Finite Element Analysis and Improved Design of Large Scale Belt Conveyor DrumsDocument13 pagesFinite Element Analysis and Improved Design of Large Scale Belt Conveyor Drumsjhon ortizNo ratings yet
- Renewable Energy Resources Unit 4Document5 pagesRenewable Energy Resources Unit 4rishu kumarNo ratings yet
- Design of Electric VehicleDocument13 pagesDesign of Electric VehicleIJAERS JOURNALNo ratings yet
- Eea 63 1 2015 078 EN LP 000 PDFDocument10 pagesEea 63 1 2015 078 EN LP 000 PDFhamza gaNo ratings yet
- Simulink - Simon AMBOISEDocument14 pagesSimulink - Simon AMBOISESimon AmboiseNo ratings yet
- EE6200 Power Electronic Control of Electric Machines Assignment-1Document3 pagesEE6200 Power Electronic Control of Electric Machines Assignment-1KesavaNo ratings yet
- CRW 199-204Document6 pagesCRW 199-204amrrefkyNo ratings yet
- Design Procedure of A Permanent MagnetDocument4 pagesDesign Procedure of A Permanent MagnetJignesh LoharNo ratings yet
- Design of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. CervinkaDocument6 pagesDesign of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. Cervinkashivendra singhNo ratings yet
- Ee462 Chap 2 1Document35 pagesEe462 Chap 2 1PraiseNo ratings yet
- DC Motor Lecture Notes 4Document24 pagesDC Motor Lecture Notes 4Man Ebook100% (1)
- EV - UG - Jan 2023Document3 pagesEV - UG - Jan 2023prasadjunk90No ratings yet
- 1 s2.0 S1876610214007589 MainDocument8 pages1 s2.0 S1876610214007589 Main51730154No ratings yet
- A Power Presizing Methodology For Electric Vehicle Traction MotorsDocument9 pagesA Power Presizing Methodology For Electric Vehicle Traction MotorsGanesan TNo ratings yet
- Renewable Energy 2022-23Document39 pagesRenewable Energy 2022-23michaelprriorNo ratings yet
- Renewable Energy Unit-4Document4 pagesRenewable Energy Unit-4homoxos344No ratings yet
- Energy Management of windPV and Battery PDFDocument9 pagesEnergy Management of windPV and Battery PDFAshwani KumarNo ratings yet
- Pneumatic Bike: A Step To Future: V. Lohit A. Imran MohideenDocument3 pagesPneumatic Bike: A Step To Future: V. Lohit A. Imran MohideenTanviNo ratings yet
- Study The Response of The Wind Turbine System Under Realistic Working Conditions Using SimulinkDocument10 pagesStudy The Response of The Wind Turbine System Under Realistic Working Conditions Using SimulinkOday IbraheemNo ratings yet
- A1-Article PublishedDocument8 pagesA1-Article PublishedTHIAGO ROSANo ratings yet
- Realization of A Wide Speed Range For An Agricultural TractorDocument7 pagesRealization of A Wide Speed Range For An Agricultural TractorMaria MarqueNo ratings yet
- Attachment PDFDocument44 pagesAttachment PDFK GOPALNo ratings yet
- Noise Analysis and Control On Motor Starting and Accelerating of Electric BusDocument7 pagesNoise Analysis and Control On Motor Starting and Accelerating of Electric BusPhil's ChannelNo ratings yet
- Direct Torque Control Strategy Based On Fuzzy LogiDocument9 pagesDirect Torque Control Strategy Based On Fuzzy Logibounabalaeddineyahoo.frNo ratings yet
- EV Design & Modelling PDFDocument25 pagesEV Design & Modelling PDFJhangir DesfrandantaNo ratings yet
- Ecar Design PDFDocument26 pagesEcar Design PDFEd NorovNo ratings yet
- Module 15Document22 pagesModule 15mrnobody252000No ratings yet
- Sae-Mechanical Engineering - Vehicle DesignDocument39 pagesSae-Mechanical Engineering - Vehicle Designapi-3712636No ratings yet
- Recent Advances of IPM Motor Drives in Power Electronics WorldDocument8 pagesRecent Advances of IPM Motor Drives in Power Electronics WorldIan SilveiraNo ratings yet
- Introduction To Drive Systems: DrivesDocument46 pagesIntroduction To Drive Systems: DrivesArun ChNo ratings yet
- MIT6 685F13 Chapter1 PDFDocument18 pagesMIT6 685F13 Chapter1 PDFJack SoNo ratings yet
- Class 18 March 2020 PDFDocument13 pagesClass 18 March 2020 PDFMuskan NehraNo ratings yet
- Wind Turbines Theory The BetzDocument23 pagesWind Turbines Theory The BetzSesetti GourisankarNo ratings yet
- Transient Stability Evaluation of Power SystemsDocument5 pagesTransient Stability Evaluation of Power SystemsNarendra YadavNo ratings yet
- Tutorial 2 Ce5620Document2 pagesTutorial 2 Ce5620tulasi ramNo ratings yet
- Tutorial 1Document3 pagesTutorial 1ngadiyarNo ratings yet
- Design and Optimization of Ion Propulsion DroneDocument7 pagesDesign and Optimization of Ion Propulsion DronebjmsejournalNo ratings yet
- Lecture 11 - Wind EnergyDocument72 pagesLecture 11 - Wind EnergyXain AliNo ratings yet
- Electric Bicycle Using Batteries and Supercapacitors: October 2007Document11 pagesElectric Bicycle Using Batteries and Supercapacitors: October 2007gulyNo ratings yet
- Design of An Outer-Rotor-Type Permanent Magnet Motor For Electric Scooter Propulsion SystemsDocument7 pagesDesign of An Outer-Rotor-Type Permanent Magnet Motor For Electric Scooter Propulsion SystemsVinay KashyapNo ratings yet
- LMS - D3 Forces On EVDocument24 pagesLMS - D3 Forces On EVSpy XNo ratings yet
- Numerical Simulation of Thermo-Fluid Dynamic Entropy Generation in Centrifugal Compressors For Micro-Turbine ApplicationDocument6 pagesNumerical Simulation of Thermo-Fluid Dynamic Entropy Generation in Centrifugal Compressors For Micro-Turbine Applicationcompdid191No ratings yet
- Betz TheoryDocument21 pagesBetz TheoryNiaz HasanNo ratings yet
- Motor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperDocument6 pagesMotor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperYuki YusenkiNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- BHEL Placement PapersDocument31 pagesBHEL Placement PapersSavesh TripathiNo ratings yet
- Pitch Control of DFIG Wind Turbine Based On Fuzzy Logic ControllerDocument5 pagesPitch Control of DFIG Wind Turbine Based On Fuzzy Logic Controllerminhhoang091No ratings yet
- Anser Key 645 - Oct 2019-GTSDocument14 pagesAnser Key 645 - Oct 2019-GTSManoharan ManuNo ratings yet
- Direct Wave Energy CoverterDocument4 pagesDirect Wave Energy Covertercaturhan007No ratings yet
- Wind Electrical Systems (WES) : Lecture Notes: (Prof.K.Subhas) Unit 1: Fundamentals of Wind TurbinesDocument46 pagesWind Electrical Systems (WES) : Lecture Notes: (Prof.K.Subhas) Unit 1: Fundamentals of Wind TurbinesNiaz Bahadur KhanNo ratings yet
- Drawbar PulDocument6 pagesDrawbar PularnelcodNo ratings yet
- 4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineDocument10 pages4.engineering-Correction of The Mechanical Speed For The Dfig Wind TurbineImpact JournalsNo ratings yet
- O level Physics Questions And Answer Practice Papers 1From EverandO level Physics Questions And Answer Practice Papers 1Rating: 3.5 out of 5 stars3.5/5 (4)
- Modern Devices: The Simple Physics of Sophisticated TechnologyFrom EverandModern Devices: The Simple Physics of Sophisticated TechnologyNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- LRL Accelerators, The 184-Inch SynchrocyclotronFrom EverandLRL Accelerators, The 184-Inch SynchrocyclotronNo ratings yet
- Elc590 PitchingDocument6 pagesElc590 Pitchingkuaci gorengNo ratings yet
- Adidas Case StudyDocument6 pagesAdidas Case StudyAndrea ToscoNo ratings yet
- Climate Change PDFDocument9 pagesClimate Change PDFKarla HernándezNo ratings yet
- BASF-Investor-Update PresentationDocument33 pagesBASF-Investor-Update PresentationFlavio SiqueiraNo ratings yet
- Article 2 Notes JhgikgDocument10 pagesArticle 2 Notes Jhgikg20r.0No ratings yet
- ETC 2.1.2.1. GHGEmissionsOfPlastics FinalReport v7.0 EDDocument68 pagesETC 2.1.2.1. GHGEmissionsOfPlastics FinalReport v7.0 EDPeter IvanovNo ratings yet
- Ikv Brief Notes (!)Document35 pagesIkv Brief Notes (!)dromomoNo ratings yet
- 2021 April UNIT 6 - ENVIRONMENTAL POLICIES, LAW AND MANAGEMENTDocument103 pages2021 April UNIT 6 - ENVIRONMENTAL POLICIES, LAW AND MANAGEMENTSouvagya GangulyNo ratings yet
- Reviewer in Science 9Document7 pagesReviewer in Science 9rogon mhikeNo ratings yet
- Global Climatic PhenomenonDocument2 pagesGlobal Climatic PhenomenonKim Jhianne De PazNo ratings yet
- NEA, Keppel To Jointly Study Feasibility of Carbon Capture Technologies For Waste-To-Energy PlantsDocument4 pagesNEA, Keppel To Jointly Study Feasibility of Carbon Capture Technologies For Waste-To-Energy PlantsKoon Teck YoongNo ratings yet
- Ethical Corporation MagazineDocument53 pagesEthical Corporation MagazinePonglert ChantornNo ratings yet
- Airports Responding To Climate Change - Airport Carbon Accreditation BrochureDocument24 pagesAirports Responding To Climate Change - Airport Carbon Accreditation BrochureMeriem Ben AbdeljeliNo ratings yet
- Mannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDocument20 pagesMannuru Et Al 2023 Artificial Intelligence in Developing Countries The Impact of Generative Artificial Intelligence AiDr. Muhammad Zaman ZahidNo ratings yet
- Environment Report 2001Document31 pagesEnvironment Report 2001Kanak YadavNo ratings yet
- A Circular Economy For Nappies Final Oct 2020Document26 pagesA Circular Economy For Nappies Final Oct 2020هلال عليNo ratings yet
- Policy and Management of Carbon Peaking and Carbon Neutrality: A Literature ReviewDocument12 pagesPolicy and Management of Carbon Peaking and Carbon Neutrality: A Literature ReviewC CNo ratings yet
- GLEC FrameworkDocument4 pagesGLEC FrameworkMaria Cecilia OliveraNo ratings yet
- CCDR Romania, Fall 2023Document90 pagesCCDR Romania, Fall 2023bubuhomeNo ratings yet
- Education and New DevelopmentsDocument622 pagesEducation and New DevelopmentsLUIS ARAGONNo ratings yet
- The Extent To Which Environmental Stewardship and Preservation of Architecture Should Be An Obligation Upon MuslimsDocument14 pagesThe Extent To Which Environmental Stewardship and Preservation of Architecture Should Be An Obligation Upon MuslimsArisha AsifNo ratings yet
- To Study The Performance and Emission Characteristics of 5% Hydrogen Blend in Diesel EngineDocument6 pagesTo Study The Performance and Emission Characteristics of 5% Hydrogen Blend in Diesel EnginePravin nitnawareNo ratings yet
- Funk Synthesis Paper 2022-23Document22 pagesFunk Synthesis Paper 2022-23api-671613367No ratings yet
- Perspectives From The Coal Industry in Mexico 2021 WWF Mexico Final WebDocument22 pagesPerspectives From The Coal Industry in Mexico 2021 WWF Mexico Final WebAJ ManurungNo ratings yet
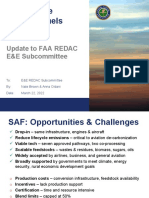
- Saf Update FaaDocument36 pagesSaf Update FaaHaryo Pandu WinotoNo ratings yet
- Barclays Research - Potencial Do Mercado VoluntárioDocument42 pagesBarclays Research - Potencial Do Mercado VoluntárioGalloNo ratings yet
- Attachment 1 Aibel AS GHG Emissions 2017-2022Document10 pagesAttachment 1 Aibel AS GHG Emissions 2017-2022DavidNo ratings yet
- Writing Task 1: Academic TrainingDocument16 pagesWriting Task 1: Academic Trainingashwin gowdaNo ratings yet
- GelibridgeVCS Project Description Final CleanDocument36 pagesGelibridgeVCS Project Description Final CleanKrishna SrinivasanNo ratings yet
- What Are The Safest and Cleanest Sources of Energy - Our World in DataDocument15 pagesWhat Are The Safest and Cleanest Sources of Energy - Our World in DataSamNo ratings yet