Download as pptx, pdf, or txt
You might also like
- UCJV300 - 150 Maintenance Parts List D501318 Ver. 2.50Document80 pagesUCJV300 - 150 Maintenance Parts List D501318 Ver. 2.50Rexy Sutanto100% (1)
- 9853 1124 01 Overhauling Instructions COP2160-2560-2160EX-2560EX PDFDocument68 pages9853 1124 01 Overhauling Instructions COP2160-2560-2160EX-2560EX PDFcoelhoclaudios100% (2)
- User 'S Manual: Questions?Document32 pagesUser 'S Manual: Questions?LG RV0% (1)
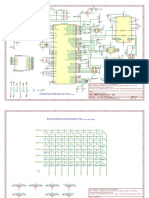
- Dell Inspiron 15 5567 BAL20 LA-D801P Rev 1.0 (A00) SchematicsDocument61 pagesDell Inspiron 15 5567 BAL20 LA-D801P Rev 1.0 (A00) SchematicsFreddy CachumbaNo ratings yet
- Dell Inspiron 3493 3593 Compal FDI55 LA J081P FDI45 LA J091P 1 0Document101 pagesDell Inspiron 3493 3593 Compal FDI55 LA J081P FDI45 LA J091P 1 0Tran Minh100% (1)
- SoC - Lab ReportDocument19 pagesSoC - Lab ReportJuan VALVERDENo ratings yet
- 07 Digital IO Interfacing and ProgrammingDocument5 pages07 Digital IO Interfacing and Programming2017ee184No ratings yet
- STM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualDocument23 pagesSTM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualWalid AmriNo ratings yet
- (03 Digital IO Interfacing and ProgrammingDocument7 pages(03 Digital IO Interfacing and ProgrammingMalix ismNo ratings yet
- ARM STM32L476 Parallel IODocument20 pagesARM STM32L476 Parallel IOSorin NicolaNo ratings yet
- EP - Unit - V - Real World Interfacing With Cortex M4 Based MicrocontrollerDocument114 pagesEP - Unit - V - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNo ratings yet
- STM32 GpioDocument5 pagesSTM32 Gpioमेनसन लाखेमरू100% (1)
- Expt 2Document8 pagesExpt 2Shivam AndureNo ratings yet
- Embetronicx Com Tutorials Microcontrollers stm32 stm32 GpioDocument27 pagesEmbetronicx Com Tutorials Microcontrollers stm32 stm32 Gpiovictor sanchezNo ratings yet
- Igor Mishkovski, PHD Faculty of Computer Science and EngineeringDocument66 pagesIgor Mishkovski, PHD Faculty of Computer Science and EngineeringSlavcho IvanovNo ratings yet
- ESD NPTEL SummaryDocument35 pagesESD NPTEL SummaryrahulpikaleNo ratings yet
- MicroprocessorHVT2019 Lec06 STM32 GPIODocument28 pagesMicroprocessorHVT2019 Lec06 STM32 GPIOTuấn Vũ Lê NguyễnNo ratings yet
- GPIO STM32 STMF4DiscoveryDocument14 pagesGPIO STM32 STMF4Discoverysboy888No ratings yet
- Using Serial Peripheral InterfaceDocument21 pagesUsing Serial Peripheral InterfaceArton TonoNo ratings yet
- Mbed BK Ed2 CH 14Document22 pagesMbed BK Ed2 CH 14Pedro Augusto PeresNo ratings yet
- Section 2 - Port Control On SAMD20: TasksDocument18 pagesSection 2 - Port Control On SAMD20: TasksjmsaakNo ratings yet
- Faculty Orientation Workshop, TE (E&TC) : Welcome ToDocument73 pagesFaculty Orientation Workshop, TE (E&TC) : Welcome Tokbtug22384No ratings yet
- CED19I032Document18 pagesCED19I032Pranavram VNo ratings yet
- TP DSPDocument16 pagesTP DSPikram mbrNo ratings yet
- ESD NPTEL SummaryDocument47 pagesESD NPTEL SummaryrahulpikaleNo ratings yet
- Laboratory Manual Rec 451 - Microprocessors & Microcontrollers LabDocument28 pagesLaboratory Manual Rec 451 - Microprocessors & Microcontrollers Lababhishek singhNo ratings yet
- Embedded Systems Lab ManualDocument60 pagesEmbedded Systems Lab Manualtmuthu123100% (1)
- ArduinoDocument22 pagesArduinosugadev74No ratings yet
- Sum Gyro Itg3200Document7 pagesSum Gyro Itg3200Rosana FariaNo ratings yet
- Unit-Iv Microcontroller Fundamentals For Basic Programming: GpiosDocument21 pagesUnit-Iv Microcontroller Fundamentals For Basic Programming: GpiossrikanthNo ratings yet
- Lab 4 Rev. 2.4 Parallel I/O and Keyboard ScanningDocument13 pagesLab 4 Rev. 2.4 Parallel I/O and Keyboard ScanningEduardo GuzmánNo ratings yet
- Elec 562Document6 pagesElec 562MOHAMMEDNo ratings yet
- Lecture Programming MicrocontrollersDocument22 pagesLecture Programming MicrocontrollersHectorLopezNo ratings yet
- Unit 5 NotesDocument25 pagesUnit 5 NoteskaustubhNo ratings yet
- LPC176XX InterfacingDocument54 pagesLPC176XX InterfacingSam techNo ratings yet
- Comsats University Microprocessor Systems & Interfacing EEE-342Document8 pagesComsats University Microprocessor Systems & Interfacing EEE-342Bilal HabibNo ratings yet
- MM Assignmemt 3Document7 pagesMM Assignmemt 3ALL ÎÑ ÔÑÈNo ratings yet
- STM32 ADC+2x16 LCD Keil Code.Document6 pagesSTM32 ADC+2x16 LCD Keil Code.MH 108812No ratings yet
- Embedded System File (Himanshu Solanki, 42313202818, ECE-2)Document30 pagesEmbedded System File (Himanshu Solanki, 42313202818, ECE-2)swimmerjoshua16No ratings yet
- Lab Initialization, GPIO, Basic SchedulingDocument6 pagesLab Initialization, GPIO, Basic Schedulingmasood ahmadNo ratings yet
- Pic MicrocontrollerDocument14 pagesPic Microcontrollermsubashece001No ratings yet
- ARM7Document76 pagesARM7Bajrang sisodiyaNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- 3 Clock and GPIOsDocument44 pages3 Clock and GPIOs21146387No ratings yet
- RPMDocument18 pagesRPMCarlos Alberto Venancio PerezNo ratings yet
- Embedded RV TwoDocument9 pagesEmbedded RV TwoishmaelnjihiaNo ratings yet
- 16f877a Pic ControllerDocument30 pages16f877a Pic Controlleryuvakirani100% (1)
- DDP Lab 3v2Document11 pagesDDP Lab 3v2Eduardo ToribioNo ratings yet
- Atmega 8Document100 pagesAtmega 8ManikandanNo ratings yet
- Arduino 101 - Basics of Programming in ArduinoDocument8 pagesArduino 101 - Basics of Programming in ArduinoshujanNo ratings yet
- IOT PracticalDocument10 pagesIOT PracticalParmar ManthanNo ratings yet
- Evd19i018-Esdp Lab 9Document18 pagesEvd19i018-Esdp Lab 9Jampani sarath chandraNo ratings yet
- ECE371 Lab1Report Group2Document9 pagesECE371 Lab1Report Group2Le HieuNo ratings yet
- Functional Verification of GPIO Core Using OVMDocument4 pagesFunctional Verification of GPIO Core Using OVMNitu VlsiNo ratings yet
- ARM STM32F107 Development Board ManualDocument66 pagesARM STM32F107 Development Board ManualTiago AveiroNo ratings yet
- 6502 User ManualDocument52 pages6502 User ManualOmar KhayyamNo ratings yet
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDocument7 pagesTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdNo ratings yet
- Preliminary: 01/05/2023 1.0E Initial Version Published. Package FPG676A SupportedDocument44 pagesPreliminary: 01/05/2023 1.0E Initial Version Published. Package FPG676A SupportedJOSE FRANÇANo ratings yet
- Esd Lab - 9Document19 pagesEsd Lab - 9Jampani sarath chandraNo ratings yet
- Atmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFDocument31 pagesAtmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFIldjohn CarrilloNo ratings yet
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Assignment IIIDocument2 pagesAssignment IIIMikiyas TewodroesNo ratings yet
- ARM: GPIO (General Purpose Input Output Register) - ..Document5 pagesARM: GPIO (General Purpose Input Output Register) - ..andresteve07No ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Seagate External HDD & SSD by Bizgram Whatsapp 87776955Document1 pageSeagate External HDD & SSD by Bizgram Whatsapp 87776955Theekshana MalalasekaraNo ratings yet
- KGEN For SAGA IN DETAILDocument9 pagesKGEN For SAGA IN DETAILKhan Abdul BasitNo ratings yet
- Essen Deinki: 22, Industrial Area, Phase-II, Chandigarh-160002 Tel: 0172-2653111-115, Fax: 0172-2653106Document15 pagesEssen Deinki: 22, Industrial Area, Phase-II, Chandigarh-160002 Tel: 0172-2653111-115, Fax: 0172-2653106saurabhNo ratings yet
- A10 Component and Bundle PL 1027Document9 pagesA10 Component and Bundle PL 1027gracechristianbaptistNo ratings yet
- A Comparison of Software and Hardware Techniques For x86 VirtualizationDocument18 pagesA Comparison of Software and Hardware Techniques For x86 VirtualizationAhmed HamoudaNo ratings yet
- Smart Response XEDocument2 pagesSmart Response XEmarekNo ratings yet
- Open Box - HP Pavilion Gaming PC (Intel Core i7-10700F1TB HDD256GB SSD16GB RAMGTX 1660 Super) - en Best Buy CanadaDocument1 pageOpen Box - HP Pavilion Gaming PC (Intel Core i7-10700F1TB HDD256GB SSD16GB RAMGTX 1660 Super) - en Best Buy CanadaJohn bandolaNo ratings yet
- Honeywell: Building Network Adapter Bna-1C/2Cs/2DnDocument54 pagesHoneywell: Building Network Adapter Bna-1C/2Cs/2DnChristoffer MadureiraNo ratings yet
- Summer 2016 Model Answer Paper PDFDocument24 pagesSummer 2016 Model Answer Paper PDFDeepali Bhaskar KarandeNo ratings yet
- BeyondOasis Steam ManualDocument14 pagesBeyondOasis Steam ManualAndrewNo ratings yet
- dsPIC33F FRM Section 5. Flash Programming (DS70191B)Document16 pagesdsPIC33F FRM Section 5. Flash Programming (DS70191B)Franco ApolinarioNo ratings yet
- TLE CSS9 Q3 ICCS M1 W2 (Lesson 2) Adjusted ABValenzuelaJrDocument22 pagesTLE CSS9 Q3 ICCS M1 W2 (Lesson 2) Adjusted ABValenzuelaJrjarelleNo ratings yet
- HB 7000, 7000 DP: Spare Parts ListDocument60 pagesHB 7000, 7000 DP: Spare Parts ListRicardo Harrington100% (1)
- A351 Service ManualDocument15 pagesA351 Service ManualDark FoxNo ratings yet
- Rotor Break Rev.0Document62 pagesRotor Break Rev.0Lucas EloyNo ratings yet
- FPGA IPUG 02037 2 2 CNN Accelerator IP CoreDocument28 pagesFPGA IPUG 02037 2 2 CNN Accelerator IP Corepaul leeNo ratings yet
- Systems Reference Library: IBM System/360 System Summary, Form A22-6810, WhichDocument199 pagesSystems Reference Library: IBM System/360 System Summary, Form A22-6810, WhichuebriccNo ratings yet
- Samsung Ue46c5100 - Training ManualDocument68 pagesSamsung Ue46c5100 - Training ManualHubert DenekaNo ratings yet
- Hizima Smart Keyless Cabinet Lock Data SheetDocument16 pagesHizima Smart Keyless Cabinet Lock Data SheetAndrie Purna FNo ratings yet
- Chapter 4Document57 pagesChapter 4Itumeleng MokhachaneNo ratings yet
- C9800 Module 1 Deploy Your Own Catalyst 9800 and GUI DemoDocument12 pagesC9800 Module 1 Deploy Your Own Catalyst 9800 and GUI DemoGilles DellaccioNo ratings yet
- Solid State Digital Hourmeters & Counters 700 Series: FeaturesDocument7 pagesSolid State Digital Hourmeters & Counters 700 Series: FeatureserenNo ratings yet
- DentalEZ J-V Generation Chair - User and Maintenance Manual (2002)Document37 pagesDentalEZ J-V Generation Chair - User and Maintenance Manual (2002)toan phanNo ratings yet
- CS401 Quiz-3 by Vu Topper RMDocument43 pagesCS401 Quiz-3 by Vu Topper RMmishalmushtaq422No ratings yet
- Pneumatic Micro Die Grinder: Operation & Parts ManualDocument12 pagesPneumatic Micro Die Grinder: Operation & Parts ManualHeli CarlosNo ratings yet