
Lesson 2 NC and CN
Lesson 2 NC and CN
You might also like
- CNC Router Essentials: The Basics for Mastering the Most Innovative Tool in Your WorkshopFrom EverandCNC Router Essentials: The Basics for Mastering the Most Innovative Tool in Your WorkshopRating: 5 out of 5 stars5/5 (3)
- Class 6 Chapter 1 ComputerDocument2 pagesClass 6 Chapter 1 ComputerMayra KumariNo ratings yet
- CNC Milling MachineDocument15 pagesCNC Milling Machinenajieyuya91% (11)
- PDFDocument688 pagesPDFaymanaymanNo ratings yet
- Assembly x86 Exam1 SolutionDocument5 pagesAssembly x86 Exam1 Solutionkhayat_samirNo ratings yet
- NC & CNC MachinesDocument12 pagesNC & CNC MachinesRenjith Rajendraprasad100% (1)
- Unit III Learning MaterialDocument37 pagesUnit III Learning Materialkk11091079No ratings yet
- Unit IiiDocument30 pagesUnit IiiSai Syam RallabhandiNo ratings yet
- Unit 4 & 5 ME8691 Computer Aided Design and ManufacturingDocument26 pagesUnit 4 & 5 ME8691 Computer Aided Design and ManufacturingMECHGOKUL KRISHNA KNo ratings yet
- Cad/Cam: NC, CNC, DNC TechnologiesDocument37 pagesCad/Cam: NC, CNC, DNC TechnologiesVijay ShakarNo ratings yet
- Numerical ControlDocument3 pagesNumerical ControlArjun NbNo ratings yet
- Lec - 1 .CAMDocument21 pagesLec - 1 .CAMOmar AlkadyNo ratings yet
- NC - CNC NotesDocument7 pagesNC - CNC NotesAmandeep SinghNo ratings yet
- Unit - Iv Part A 16.08Document19 pagesUnit - Iv Part A 16.08Mohd InayathNo ratings yet
- Chapter Motion and Control SystemDocument13 pagesChapter Motion and Control SystemRavinder SinghNo ratings yet
- CNC Mid 1 KeyDocument14 pagesCNC Mid 1 Keypala srinivas reddyNo ratings yet
- CNC Assignment: Shagun SharmaDocument27 pagesCNC Assignment: Shagun SharmaShagun SharmaNo ratings yet
- NcmachinesDocument4 pagesNcmachinesmanish kumarNo ratings yet
- CNC and NC MachineDocument36 pagesCNC and NC MachineShaaf AmjadNo ratings yet
- CNC Machining & Additive ManufacturingDocument17 pagesCNC Machining & Additive ManufacturingArun kumar rouniyarNo ratings yet
- Module - Additive Manufacturing 18 SchemeDocument54 pagesModule - Additive Manufacturing 18 SchemeSANTOSHNo ratings yet
- Unit - Iv Part F 21.08Document24 pagesUnit - Iv Part F 21.08Mohd InayathNo ratings yet
- Fundamentals of NC Technology-Unit-1Document38 pagesFundamentals of NC Technology-Unit-1Swarna Paul100% (1)
- Introduction To Numerical Control (NC)Document58 pagesIntroduction To Numerical Control (NC)Dani AbHalimNo ratings yet
- Computer Numerical Control Systems (CNC)Document13 pagesComputer Numerical Control Systems (CNC)lucasNo ratings yet
- Conventional Numerical ControlDocument12 pagesConventional Numerical Controlsagar yadavNo ratings yet
- Numeric ControlDocument22 pagesNumeric ControlMUSKAN PRNNo ratings yet
- CNC NotesDocument26 pagesCNC NotesXaf FarNo ratings yet
- Lab Sheet 3 CNC Milling and TurningDocument5 pagesLab Sheet 3 CNC Milling and TurningChrist LeeNo ratings yet
- NCDocument7 pagesNCsugiantobarusNo ratings yet
- A Seminar On NC MachineDocument25 pagesA Seminar On NC MachineSai TejaNo ratings yet
- Scilab ManualDocument44 pagesScilab ManualMeer Mustafa AliNo ratings yet
- CNC and Part ProgramDocument54 pagesCNC and Part ProgramAkatew Haile Mebrahtu100% (1)
- Numerical Machines - NotesDocument23 pagesNumerical Machines - NotesPethurajNo ratings yet
- Module - 4Document71 pagesModule - 4Anand ANo ratings yet
- Explain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)Document5 pagesExplain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)rajeshNo ratings yet
- Chapter 4 - 1Document13 pagesChapter 4 - 1khalil alhatabNo ratings yet
- Numerical Control: Y. Hidayathullah, Technical Officer - Cad/Cam Cipet - MysoreDocument25 pagesNumerical Control: Y. Hidayathullah, Technical Officer - Cad/Cam Cipet - MysoreSagar PoteNo ratings yet
- NC, CNC, DNC, Adaptive ControlDocument17 pagesNC, CNC, DNC, Adaptive ControlAmirul Hacker Atom100% (1)
- Notes of CNCDocument4 pagesNotes of CNCSube Singh InsanNo ratings yet
- CNC Lecture01Document44 pagesCNC Lecture01mohamed adelNo ratings yet
- Cim Module IIIDocument126 pagesCim Module IIIRamees KpNo ratings yet
- Unit 5 CNC Machines and Tool Handling SystemsDocument22 pagesUnit 5 CNC Machines and Tool Handling SystemssmijusNo ratings yet
- Implementation of PLC For CNC Flame Cutting MachineDocument10 pagesImplementation of PLC For CNC Flame Cutting MachineJagadeesh Bavisetti100% (1)
- Module - 4Document106 pagesModule - 4Anand ANo ratings yet
- Lecture NC, CNC and DNCDocument33 pagesLecture NC, CNC and DNCabbas ali100% (2)
- Cim Module III-1Document37 pagesCim Module III-1Akash ByjuNo ratings yet
- Mft-Ii Unit - VDocument20 pagesMft-Ii Unit - ValagarsmeNo ratings yet
- Numerical Control (NC) : Mechanical Actions of A Machine Are Controlled by A Program Containing Coded Alphanumeric DataDocument46 pagesNumerical Control (NC) : Mechanical Actions of A Machine Are Controlled by A Program Containing Coded Alphanumeric DataAkatew Haile MebrahtuNo ratings yet
- NC CNC DNCDocument6 pagesNC CNC DNCNirmitha BathenaNo ratings yet
- 1.1 Computer-Aided Manufacturing: Department of Mechanical Engineering, R.V.R. & J.C.College of Engineering, Guntur-19Document38 pages1.1 Computer-Aided Manufacturing: Department of Mechanical Engineering, R.V.R. & J.C.College of Engineering, Guntur-19Madhu SudhanNo ratings yet
- Unit 3Document95 pagesUnit 3zubbbuNo ratings yet
- CNC MachinesDocument9 pagesCNC MachinesMohamed El-WakilNo ratings yet
- CNC AutomationDocument19 pagesCNC Automationsameersaurabh5No ratings yet
- Title Objective: Figure 1: Hitachi Seiki Hitec-Turn20SiiDocument11 pagesTitle Objective: Figure 1: Hitachi Seiki Hitec-Turn20SiiSilang KataNo ratings yet
- Cam Lab 1Document40 pagesCam Lab 1Madhusudhan Rao KNo ratings yet
- Introduction To NC2Document27 pagesIntroduction To NC2jm_anakNo ratings yet
- Cim Unit 01Document7 pagesCim Unit 0108 Aditya dahakeNo ratings yet
- Me 473 - Unit 3Document46 pagesMe 473 - Unit 3Ama Serwaa YeboahNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Machine Elements I TutorDocument6 pagesMachine Elements I Tutoryiheyis mulatuNo ratings yet
- Fike Mechanical AnswerDocument38 pagesFike Mechanical Answeryiheyis mulatuNo ratings yet
- Mhe & ImDocument2 pagesMhe & Imyiheyis mulatuNo ratings yet
- Exit Model A1Document38 pagesExit Model A1yiheyis mulatuNo ratings yet
- Computer Architecture Unit 1 MCQDocument6 pagesComputer Architecture Unit 1 MCQRaagavi VNo ratings yet
- 1 Principles of Compiler DesignDocument89 pages1 Principles of Compiler DesignPadmavathi BNo ratings yet
- Difference Between Top Down and Bottom Up DesignDocument2 pagesDifference Between Top Down and Bottom Up DesignJijin Rs100% (1)
- Computer OrganizationDocument67 pagesComputer OrganizationDani RaniNo ratings yet
- The X86 Microprocessor: ObjectivesDocument32 pagesThe X86 Microprocessor: Objectivespapikhu36100% (4)
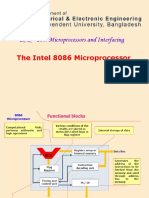
- ECR - 209: Microprocessors and Interfacing: The Intel 8086 MicroprocessorDocument32 pagesECR - 209: Microprocessors and Interfacing: The Intel 8086 MicroprocessorMuhammadHaqueNo ratings yet
- ICSE Class 10 2023-2024 Computer Notes Short Notes PDFDocument57 pagesICSE Class 10 2023-2024 Computer Notes Short Notes PDFDs Adithya90% (10)
- A Level CS CH 8 9618Document8 pagesA Level CS CH 8 9618calvin esauNo ratings yet
- RF & Memory 2 - Final Register Set Design v1Document38 pagesRF & Memory 2 - Final Register Set Design v1S.M. SIAMNo ratings yet
- Section A Communication Satellite Link Design Communication Satellite Link DesignDocument91 pagesSection A Communication Satellite Link Design Communication Satellite Link DesignMOHAMMAD DANISH KHANNo ratings yet
- Prctice Question On DAGDocument21 pagesPrctice Question On DAGshubh agrawalNo ratings yet
- CSO Lecture Notes Unit 1-3Document67 pagesCSO Lecture Notes Unit 1-3Naman PatidarNo ratings yet
- Basics of Computer Hardware & SoftwareDocument33 pagesBasics of Computer Hardware & SoftwarenamitharNo ratings yet
- SP QuestionDocument28 pagesSP QuestionPratik0% (1)
- Ytha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)Document551 pagesYtha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)harini90% (72)
- Syllabus of VTU 2016Document19 pagesSyllabus of VTU 2016Rajdeep ChatterjeeNo ratings yet
- Uploads - Question - Bank - Btech - 2sem - Itp Paper 2 PDFDocument14 pagesUploads - Question - Bank - Btech - 2sem - Itp Paper 2 PDFCsNo ratings yet
- Python - Basic - 1 - Jupyter Notebook (Student)Document44 pagesPython - Basic - 1 - Jupyter Notebook (Student)Mesbahur RahmanNo ratings yet
- Wa0005.Document8 pagesWa0005.nehasatkur99No ratings yet
- Lec 9Document19 pagesLec 9Aqsa gulNo ratings yet
- CCP 21CS111 (UNIT1) UpdatedDocument112 pagesCCP 21CS111 (UNIT1) UpdatedChinmayee BhatNo ratings yet
- Print Final FinalDocument59 pagesPrint Final Finalaryantiwari.1640No ratings yet
- ZeusDocument31 pagesZeusAferVentusNo ratings yet
- Automata and Compiler Design - Lecture Notes On UNIT 1Document25 pagesAutomata and Compiler Design - Lecture Notes On UNIT 1Rue ChagaresangoNo ratings yet
- 02 Task Performance 1 - Assembly Language BasicsDocument4 pages02 Task Performance 1 - Assembly Language BasicsNice MoveNo ratings yet
- Microprocessor Lecture Notes 1 10Document202 pagesMicroprocessor Lecture Notes 1 10Ambarish SinghNo ratings yet
- Core Java: Why Java Is Important To Internet?Document67 pagesCore Java: Why Java Is Important To Internet?Om Prakash PrajapatiNo ratings yet




























































































Download as ppt, pdf, or txt
You might also like
- CNC Router Essentials: The Basics for Mastering the Most Innovative Tool in Your WorkshopFrom EverandCNC Router Essentials: The Basics for Mastering the Most Innovative Tool in Your WorkshopRating: 5 out of 5 stars5/5 (3)
- Class 6 Chapter 1 ComputerDocument2 pagesClass 6 Chapter 1 ComputerMayra KumariNo ratings yet
- CNC Milling MachineDocument15 pagesCNC Milling Machinenajieyuya91% (11)
- PDFDocument688 pagesPDFaymanaymanNo ratings yet
- Assembly x86 Exam1 SolutionDocument5 pagesAssembly x86 Exam1 Solutionkhayat_samirNo ratings yet
- NC & CNC MachinesDocument12 pagesNC & CNC MachinesRenjith Rajendraprasad100% (1)
- Unit III Learning MaterialDocument37 pagesUnit III Learning Materialkk11091079No ratings yet
- Unit IiiDocument30 pagesUnit IiiSai Syam RallabhandiNo ratings yet
- Unit 4 & 5 ME8691 Computer Aided Design and ManufacturingDocument26 pagesUnit 4 & 5 ME8691 Computer Aided Design and ManufacturingMECHGOKUL KRISHNA KNo ratings yet
- Cad/Cam: NC, CNC, DNC TechnologiesDocument37 pagesCad/Cam: NC, CNC, DNC TechnologiesVijay ShakarNo ratings yet
- Numerical ControlDocument3 pagesNumerical ControlArjun NbNo ratings yet
- Lec - 1 .CAMDocument21 pagesLec - 1 .CAMOmar AlkadyNo ratings yet
- NC - CNC NotesDocument7 pagesNC - CNC NotesAmandeep SinghNo ratings yet
- Unit - Iv Part A 16.08Document19 pagesUnit - Iv Part A 16.08Mohd InayathNo ratings yet
- Chapter Motion and Control SystemDocument13 pagesChapter Motion and Control SystemRavinder SinghNo ratings yet
- CNC Mid 1 KeyDocument14 pagesCNC Mid 1 Keypala srinivas reddyNo ratings yet
- CNC Assignment: Shagun SharmaDocument27 pagesCNC Assignment: Shagun SharmaShagun SharmaNo ratings yet
- NcmachinesDocument4 pagesNcmachinesmanish kumarNo ratings yet
- CNC and NC MachineDocument36 pagesCNC and NC MachineShaaf AmjadNo ratings yet
- CNC Machining & Additive ManufacturingDocument17 pagesCNC Machining & Additive ManufacturingArun kumar rouniyarNo ratings yet
- Module - Additive Manufacturing 18 SchemeDocument54 pagesModule - Additive Manufacturing 18 SchemeSANTOSHNo ratings yet
- Unit - Iv Part F 21.08Document24 pagesUnit - Iv Part F 21.08Mohd InayathNo ratings yet
- Fundamentals of NC Technology-Unit-1Document38 pagesFundamentals of NC Technology-Unit-1Swarna Paul100% (1)
- Introduction To Numerical Control (NC)Document58 pagesIntroduction To Numerical Control (NC)Dani AbHalimNo ratings yet
- Computer Numerical Control Systems (CNC)Document13 pagesComputer Numerical Control Systems (CNC)lucasNo ratings yet
- Conventional Numerical ControlDocument12 pagesConventional Numerical Controlsagar yadavNo ratings yet
- Numeric ControlDocument22 pagesNumeric ControlMUSKAN PRNNo ratings yet
- CNC NotesDocument26 pagesCNC NotesXaf FarNo ratings yet
- Lab Sheet 3 CNC Milling and TurningDocument5 pagesLab Sheet 3 CNC Milling and TurningChrist LeeNo ratings yet
- NCDocument7 pagesNCsugiantobarusNo ratings yet
- A Seminar On NC MachineDocument25 pagesA Seminar On NC MachineSai TejaNo ratings yet
- Scilab ManualDocument44 pagesScilab ManualMeer Mustafa AliNo ratings yet
- CNC and Part ProgramDocument54 pagesCNC and Part ProgramAkatew Haile Mebrahtu100% (1)
- Numerical Machines - NotesDocument23 pagesNumerical Machines - NotesPethurajNo ratings yet
- Module - 4Document71 pagesModule - 4Anand ANo ratings yet
- Explain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)Document5 pagesExplain The Parts of The NC Machine/ Explain The Block Diagram of NC Machine. (3/4 Marks)rajeshNo ratings yet
- Chapter 4 - 1Document13 pagesChapter 4 - 1khalil alhatabNo ratings yet
- Numerical Control: Y. Hidayathullah, Technical Officer - Cad/Cam Cipet - MysoreDocument25 pagesNumerical Control: Y. Hidayathullah, Technical Officer - Cad/Cam Cipet - MysoreSagar PoteNo ratings yet
- NC, CNC, DNC, Adaptive ControlDocument17 pagesNC, CNC, DNC, Adaptive ControlAmirul Hacker Atom100% (1)
- Notes of CNCDocument4 pagesNotes of CNCSube Singh InsanNo ratings yet
- CNC Lecture01Document44 pagesCNC Lecture01mohamed adelNo ratings yet
- Cim Module IIIDocument126 pagesCim Module IIIRamees KpNo ratings yet
- Unit 5 CNC Machines and Tool Handling SystemsDocument22 pagesUnit 5 CNC Machines and Tool Handling SystemssmijusNo ratings yet
- Implementation of PLC For CNC Flame Cutting MachineDocument10 pagesImplementation of PLC For CNC Flame Cutting MachineJagadeesh Bavisetti100% (1)
- Module - 4Document106 pagesModule - 4Anand ANo ratings yet
- Lecture NC, CNC and DNCDocument33 pagesLecture NC, CNC and DNCabbas ali100% (2)
- Cim Module III-1Document37 pagesCim Module III-1Akash ByjuNo ratings yet
- Mft-Ii Unit - VDocument20 pagesMft-Ii Unit - ValagarsmeNo ratings yet
- Numerical Control (NC) : Mechanical Actions of A Machine Are Controlled by A Program Containing Coded Alphanumeric DataDocument46 pagesNumerical Control (NC) : Mechanical Actions of A Machine Are Controlled by A Program Containing Coded Alphanumeric DataAkatew Haile MebrahtuNo ratings yet
- NC CNC DNCDocument6 pagesNC CNC DNCNirmitha BathenaNo ratings yet
- 1.1 Computer-Aided Manufacturing: Department of Mechanical Engineering, R.V.R. & J.C.College of Engineering, Guntur-19Document38 pages1.1 Computer-Aided Manufacturing: Department of Mechanical Engineering, R.V.R. & J.C.College of Engineering, Guntur-19Madhu SudhanNo ratings yet
- Unit 3Document95 pagesUnit 3zubbbuNo ratings yet
- CNC MachinesDocument9 pagesCNC MachinesMohamed El-WakilNo ratings yet
- CNC AutomationDocument19 pagesCNC Automationsameersaurabh5No ratings yet
- Title Objective: Figure 1: Hitachi Seiki Hitec-Turn20SiiDocument11 pagesTitle Objective: Figure 1: Hitachi Seiki Hitec-Turn20SiiSilang KataNo ratings yet
- Cam Lab 1Document40 pagesCam Lab 1Madhusudhan Rao KNo ratings yet
- Introduction To NC2Document27 pagesIntroduction To NC2jm_anakNo ratings yet
- Cim Unit 01Document7 pagesCim Unit 0108 Aditya dahakeNo ratings yet
- Me 473 - Unit 3Document46 pagesMe 473 - Unit 3Ama Serwaa YeboahNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Machine Elements I TutorDocument6 pagesMachine Elements I Tutoryiheyis mulatuNo ratings yet
- Fike Mechanical AnswerDocument38 pagesFike Mechanical Answeryiheyis mulatuNo ratings yet
- Mhe & ImDocument2 pagesMhe & Imyiheyis mulatuNo ratings yet
- Exit Model A1Document38 pagesExit Model A1yiheyis mulatuNo ratings yet
- Computer Architecture Unit 1 MCQDocument6 pagesComputer Architecture Unit 1 MCQRaagavi VNo ratings yet
- 1 Principles of Compiler DesignDocument89 pages1 Principles of Compiler DesignPadmavathi BNo ratings yet
- Difference Between Top Down and Bottom Up DesignDocument2 pagesDifference Between Top Down and Bottom Up DesignJijin Rs100% (1)
- Computer OrganizationDocument67 pagesComputer OrganizationDani RaniNo ratings yet
- The X86 Microprocessor: ObjectivesDocument32 pagesThe X86 Microprocessor: Objectivespapikhu36100% (4)
- ECR - 209: Microprocessors and Interfacing: The Intel 8086 MicroprocessorDocument32 pagesECR - 209: Microprocessors and Interfacing: The Intel 8086 MicroprocessorMuhammadHaqueNo ratings yet
- ICSE Class 10 2023-2024 Computer Notes Short Notes PDFDocument57 pagesICSE Class 10 2023-2024 Computer Notes Short Notes PDFDs Adithya90% (10)
- A Level CS CH 8 9618Document8 pagesA Level CS CH 8 9618calvin esauNo ratings yet
- RF & Memory 2 - Final Register Set Design v1Document38 pagesRF & Memory 2 - Final Register Set Design v1S.M. SIAMNo ratings yet
- Section A Communication Satellite Link Design Communication Satellite Link DesignDocument91 pagesSection A Communication Satellite Link Design Communication Satellite Link DesignMOHAMMAD DANISH KHANNo ratings yet
- Prctice Question On DAGDocument21 pagesPrctice Question On DAGshubh agrawalNo ratings yet
- CSO Lecture Notes Unit 1-3Document67 pagesCSO Lecture Notes Unit 1-3Naman PatidarNo ratings yet
- Basics of Computer Hardware & SoftwareDocument33 pagesBasics of Computer Hardware & SoftwarenamitharNo ratings yet
- SP QuestionDocument28 pagesSP QuestionPratik0% (1)
- Ytha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)Document551 pagesYtha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)harini90% (72)
- Syllabus of VTU 2016Document19 pagesSyllabus of VTU 2016Rajdeep ChatterjeeNo ratings yet
- Uploads - Question - Bank - Btech - 2sem - Itp Paper 2 PDFDocument14 pagesUploads - Question - Bank - Btech - 2sem - Itp Paper 2 PDFCsNo ratings yet
- Python - Basic - 1 - Jupyter Notebook (Student)Document44 pagesPython - Basic - 1 - Jupyter Notebook (Student)Mesbahur RahmanNo ratings yet
- Wa0005.Document8 pagesWa0005.nehasatkur99No ratings yet
- Lec 9Document19 pagesLec 9Aqsa gulNo ratings yet
- CCP 21CS111 (UNIT1) UpdatedDocument112 pagesCCP 21CS111 (UNIT1) UpdatedChinmayee BhatNo ratings yet
- Print Final FinalDocument59 pagesPrint Final Finalaryantiwari.1640No ratings yet
- ZeusDocument31 pagesZeusAferVentusNo ratings yet
- Automata and Compiler Design - Lecture Notes On UNIT 1Document25 pagesAutomata and Compiler Design - Lecture Notes On UNIT 1Rue ChagaresangoNo ratings yet
- 02 Task Performance 1 - Assembly Language BasicsDocument4 pages02 Task Performance 1 - Assembly Language BasicsNice MoveNo ratings yet
- Microprocessor Lecture Notes 1 10Document202 pagesMicroprocessor Lecture Notes 1 10Ambarish SinghNo ratings yet
- Core Java: Why Java Is Important To Internet?Document67 pagesCore Java: Why Java Is Important To Internet?Om Prakash PrajapatiNo ratings yet