
L2 - Multiprocessor System
L2 - Multiprocessor System
You might also like
- Features of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit ThakurDocument23 pagesFeatures of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit Thakuritsanshika555No ratings yet
- Dbase III Plus TutorialDocument24 pagesDbase III Plus Tutorialchungta9100% (1)
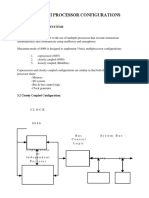
- Multi Processor Configurations: 3.1 Multiprocessor SystemsDocument3 pagesMulti Processor Configurations: 3.1 Multiprocessor SystemsAnonymous c75J3yX33No ratings yet
- Up 4Document27 pagesUp 4josephNo ratings yet
- Coprocessor AlteredDocument42 pagesCoprocessor Alteredchandanayadav8490No ratings yet
- Multiprocessor ConfigurationDocument17 pagesMultiprocessor ConfigurationAdnan MohammedNo ratings yet
- Cse2006 - Microprocessor & InterfacingDocument53 pagesCse2006 - Microprocessor & InterfacingPREETI SAI THANDAVAN 20BCE1740No ratings yet
- 2 - 7 Multiprocessor ConfigurationsDocument15 pages2 - 7 Multiprocessor ConfigurationsrakkkkNo ratings yet
- Unit IiiDocument25 pagesUnit IiiPrakash SNo ratings yet
- 8087 CoprocessorDocument44 pages8087 CoprocessormridulkhandelwalNo ratings yet
- Coprocessor 1Document50 pagesCoprocessor 1chandanayadav8490No ratings yet
- Manual M 86-01Document79 pagesManual M 86-01Abvolt IndiaNo ratings yet
- Advanced 8086 Microprocessor Trainer: Learning MaterialDocument80 pagesAdvanced 8086 Microprocessor Trainer: Learning Materialk.jp914733No ratings yet
- 8086 Microprocessor Trainer Kit - PDF 2Document116 pages8086 Microprocessor Trainer Kit - PDF 2Aviraj Ghanekar0% (1)
- Mini Max Mode in 8086Document9 pagesMini Max Mode in 8086aliraqisaad478No ratings yet
- Features of 8086Document31 pagesFeatures of 8086Ngaa SiemensNo ratings yet
- 80286Document74 pages80286Arannya MonzurNo ratings yet
- Lecture 3 Features of 16-Bit Microprocessor 8086Document35 pagesLecture 3 Features of 16-Bit Microprocessor 8086Brightone NyandoroNo ratings yet
- Processor: Microprocessor Architectures and Assembly Language ProgrammingDocument76 pagesProcessor: Microprocessor Architectures and Assembly Language ProgrammingInquisitive KidNo ratings yet
- CoprocessorDocument23 pagesCoprocessorsarthakNo ratings yet
- Chapter 4 PPTDocument24 pagesChapter 4 PPTMengistu BirukeNo ratings yet
- Microprocessors & Microcontrollers: Lecture 16 (3 Hour) 08/03/2022Document31 pagesMicroprocessors & Microcontrollers: Lecture 16 (3 Hour) 08/03/2022itsaartihere001No ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewN.D.SurendharNo ratings yet
- MPMC Unit-3 Cse ArunDocument26 pagesMPMC Unit-3 Cse ArunhtasarpnuraNo ratings yet
- NEC V20 Micro Systems Journal 1985-11-12Document10 pagesNEC V20 Micro Systems Journal 1985-11-12Tit fuckerNo ratings yet
- 80286Document28 pages80286Kavitha SubramaniamNo ratings yet
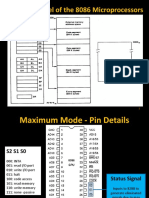
- 6 Maximum ModeDocument23 pages6 Maximum ModeTejaswi NisanthNo ratings yet
- Pentium ArchitectureDocument3 pagesPentium ArchitecturedeapaNo ratings yet
- 8086 Family Users ManualDocument208 pages8086 Family Users ManualPriji PillaiNo ratings yet
- Advanced Processor Architecture: Summer 1997Document28 pagesAdvanced Processor Architecture: Summer 1997Fuck turdNo ratings yet
- 8086 Family Users ManualDocument208 pages8086 Family Users ManualAniket Garg100% (1)
- The Pentium Family of Processors Originated From The 80486 MicroprocessorDocument2 pagesThe Pentium Family of Processors Originated From The 80486 Microprocessorprime armyNo ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewN.D.SurendharNo ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewGaganBhayanaNo ratings yet
- Salient Features of 80586 (Pentium)Document3 pagesSalient Features of 80586 (Pentium)Irish MalibanNo ratings yet
- Features of 80186, 80286, 80386, 80486 and Pentium Family ProcessorsDocument32 pagesFeatures of 80186, 80286, 80386, 80486 and Pentium Family ProcessorsRahul SinghNo ratings yet
- 8087 Numeric Data Co ProcessorDocument22 pages8087 Numeric Data Co ProcessorAbhishek SinghNo ratings yet
- Pentium ArchitectureDocument3 pagesPentium ArchitectureweblnsNo ratings yet
- Helm PCB - 8088 ComputerDocument9 pagesHelm PCB - 8088 ComputerGabriela FrederickNo ratings yet
- Advantages and Disadvantages MPDocument5 pagesAdvantages and Disadvantages MPVidhya AigalNo ratings yet
- Vtu 4TH Sem Cse Microprocessors Notes 10CS45Document125 pagesVtu 4TH Sem Cse Microprocessors Notes 10CS45EKTHATIGER63359095% (22)
- Packetmaster EX484-3 Web GUIDocument28 pagesPacketmaster EX484-3 Web GUIAmy LiNo ratings yet
- MPMC - 3.4 8086 - Multi-Processor - Min and Max ModeDocument12 pagesMPMC - 3.4 8086 - Multi-Processor - Min and Max ModesestokurtaNo ratings yet
- Module 4 MPDocument11 pagesModule 4 MPvreshmi885113No ratings yet
- Ce500 FactoryDocument9 pagesCe500 FactoryAgus HariyantoNo ratings yet
- Esa86882 UmDocument139 pagesEsa86882 UmVishnuTej VinjamuriNo ratings yet
- Coprocessor Configurations Closely Coupled Losely CoupledDocument9 pagesCoprocessor Configurations Closely Coupled Losely Coupledlauro eugin brittoNo ratings yet
- Presented by Dr. Md. Abir Hossain Dept. of ICT MbstuDocument28 pagesPresented by Dr. Md. Abir Hossain Dept. of ICT Mbstuit21007No ratings yet
- Unit 3Document28 pagesUnit 3usefulofworldNo ratings yet
- Physical AddressingDocument28 pagesPhysical AddressingRajiv SivalingamNo ratings yet
- Module 2 - Lecture 8Document24 pagesModule 2 - Lecture 8AQeNo ratings yet
- MPC5xxx Programming The eTPUDocument14 pagesMPC5xxx Programming The eTPUSAABNo ratings yet
- Lab 5Document5 pagesLab 5AliBaranIşıkNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedFrom EverandOperating Systems Interview Questions You'll Most Likely Be AskedNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- REF 630 Tech 756508 ENeDocument1,412 pagesREF 630 Tech 756508 ENeHugo GalarretaNo ratings yet
- LogDocument4 pagesLogberlianflasherNo ratings yet
- Eee 342 11 IoDocument33 pagesEee 342 11 IoHafiz Adil AsrarNo ratings yet
- Cloud Based Smart Energy MeterDocument10 pagesCloud Based Smart Energy MeterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exercises Subnet Mask and SubnettingDocument3 pagesExercises Subnet Mask and SubnettingMorn TheaNo ratings yet
- IT Unit 6 - Multi Threaded Programming and Exception Handling-1Document83 pagesIT Unit 6 - Multi Threaded Programming and Exception Handling-1shivaNo ratings yet
- ICT PackagingDocument19 pagesICT PackagingParnab ShanNo ratings yet
- Linux Question and AnswersDocument2 pagesLinux Question and AnswersBasarkar Sriker100% (1)
- UART ProtocolDocument6 pagesUART Protocolvimal rajNo ratings yet
- DW Technical Considerations Usb3 PDFDocument11 pagesDW Technical Considerations Usb3 PDFOfteniih OftenniihNo ratings yet
- ELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HDocument9 pagesELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HPindi Prince PindiNo ratings yet
- Venkateswara Reddy - JavaDocument10 pagesVenkateswara Reddy - JavaphaniNo ratings yet
- Online Application Monitoring ToolDocument43 pagesOnline Application Monitoring ToolMd Shaukat AliNo ratings yet
- 01 Introduction To Information Technology1Document74 pages01 Introduction To Information Technology1Collins OchiengNo ratings yet
- Unsolved Paper of ComputerDocument7 pagesUnsolved Paper of ComputerHarshit SanadhyaNo ratings yet
- EWS101 DatasheetDocument4 pagesEWS101 DatasheetZaw Lin HtutNo ratings yet
- How To Configure Azure Application Gateway To Forward Logs To EventTrackerDocument7 pagesHow To Configure Azure Application Gateway To Forward Logs To EventTrackercristian080989No ratings yet
- Cloud ComputingDocument19 pagesCloud ComputingDikshith RoshanNo ratings yet
- 8255 Peripheral Study CardDocument2 pages8255 Peripheral Study CardAmber ClarkNo ratings yet
- CCNA PART1 SlidesDocument60 pagesCCNA PART1 SlidesKhairullah OriaKhilNo ratings yet
- Line Modelling and EnergizationDocument6 pagesLine Modelling and EnergizationarunmozhiNo ratings yet
- 2019-12-04 18.12.20 CrashDocument5 pages2019-12-04 18.12.20 CrashrqNo ratings yet
- Calibre Perc Ds PDFDocument2 pagesCalibre Perc Ds PDFashwini32No ratings yet
- AMILO Pi 1505Document3 pagesAMILO Pi 1505dsijan2007No ratings yet
- Manual BasecamDocument118 pagesManual BasecamGermán BergerNo ratings yet
- DropboxDocument6 pagesDropboxNoor AfandyNo ratings yet
- Midterm SolutionsDocument10 pagesMidterm Solutionsdragon0962No ratings yet
- LogDocument24 pagesLogunhyadhiabhihauraNo ratings yet
- INPA HelpDocument14 pagesINPA HelpvicafreakNo ratings yet
























































































Download as pptx, pdf, or txt
You might also like
- Features of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit ThakurDocument23 pagesFeatures of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit Thakuritsanshika555No ratings yet
- Dbase III Plus TutorialDocument24 pagesDbase III Plus Tutorialchungta9100% (1)
- Multi Processor Configurations: 3.1 Multiprocessor SystemsDocument3 pagesMulti Processor Configurations: 3.1 Multiprocessor SystemsAnonymous c75J3yX33No ratings yet
- Up 4Document27 pagesUp 4josephNo ratings yet
- Coprocessor AlteredDocument42 pagesCoprocessor Alteredchandanayadav8490No ratings yet
- Multiprocessor ConfigurationDocument17 pagesMultiprocessor ConfigurationAdnan MohammedNo ratings yet
- Cse2006 - Microprocessor & InterfacingDocument53 pagesCse2006 - Microprocessor & InterfacingPREETI SAI THANDAVAN 20BCE1740No ratings yet
- 2 - 7 Multiprocessor ConfigurationsDocument15 pages2 - 7 Multiprocessor ConfigurationsrakkkkNo ratings yet
- Unit IiiDocument25 pagesUnit IiiPrakash SNo ratings yet
- 8087 CoprocessorDocument44 pages8087 CoprocessormridulkhandelwalNo ratings yet
- Coprocessor 1Document50 pagesCoprocessor 1chandanayadav8490No ratings yet
- Manual M 86-01Document79 pagesManual M 86-01Abvolt IndiaNo ratings yet
- Advanced 8086 Microprocessor Trainer: Learning MaterialDocument80 pagesAdvanced 8086 Microprocessor Trainer: Learning Materialk.jp914733No ratings yet
- 8086 Microprocessor Trainer Kit - PDF 2Document116 pages8086 Microprocessor Trainer Kit - PDF 2Aviraj Ghanekar0% (1)
- Mini Max Mode in 8086Document9 pagesMini Max Mode in 8086aliraqisaad478No ratings yet
- Features of 8086Document31 pagesFeatures of 8086Ngaa SiemensNo ratings yet
- 80286Document74 pages80286Arannya MonzurNo ratings yet
- Lecture 3 Features of 16-Bit Microprocessor 8086Document35 pagesLecture 3 Features of 16-Bit Microprocessor 8086Brightone NyandoroNo ratings yet
- Processor: Microprocessor Architectures and Assembly Language ProgrammingDocument76 pagesProcessor: Microprocessor Architectures and Assembly Language ProgrammingInquisitive KidNo ratings yet
- CoprocessorDocument23 pagesCoprocessorsarthakNo ratings yet
- Chapter 4 PPTDocument24 pagesChapter 4 PPTMengistu BirukeNo ratings yet
- Microprocessors & Microcontrollers: Lecture 16 (3 Hour) 08/03/2022Document31 pagesMicroprocessors & Microcontrollers: Lecture 16 (3 Hour) 08/03/2022itsaartihere001No ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewN.D.SurendharNo ratings yet
- MPMC Unit-3 Cse ArunDocument26 pagesMPMC Unit-3 Cse ArunhtasarpnuraNo ratings yet
- NEC V20 Micro Systems Journal 1985-11-12Document10 pagesNEC V20 Micro Systems Journal 1985-11-12Tit fuckerNo ratings yet
- 80286Document28 pages80286Kavitha SubramaniamNo ratings yet
- 6 Maximum ModeDocument23 pages6 Maximum ModeTejaswi NisanthNo ratings yet
- Pentium ArchitectureDocument3 pagesPentium ArchitecturedeapaNo ratings yet
- 8086 Family Users ManualDocument208 pages8086 Family Users ManualPriji PillaiNo ratings yet
- Advanced Processor Architecture: Summer 1997Document28 pagesAdvanced Processor Architecture: Summer 1997Fuck turdNo ratings yet
- 8086 Family Users ManualDocument208 pages8086 Family Users ManualAniket Garg100% (1)
- The Pentium Family of Processors Originated From The 80486 MicroprocessorDocument2 pagesThe Pentium Family of Processors Originated From The 80486 Microprocessorprime armyNo ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewN.D.SurendharNo ratings yet
- Multiprocessor Configuration OverviewDocument3 pagesMultiprocessor Configuration OverviewGaganBhayanaNo ratings yet
- Salient Features of 80586 (Pentium)Document3 pagesSalient Features of 80586 (Pentium)Irish MalibanNo ratings yet
- Features of 80186, 80286, 80386, 80486 and Pentium Family ProcessorsDocument32 pagesFeatures of 80186, 80286, 80386, 80486 and Pentium Family ProcessorsRahul SinghNo ratings yet
- 8087 Numeric Data Co ProcessorDocument22 pages8087 Numeric Data Co ProcessorAbhishek SinghNo ratings yet
- Pentium ArchitectureDocument3 pagesPentium ArchitectureweblnsNo ratings yet
- Helm PCB - 8088 ComputerDocument9 pagesHelm PCB - 8088 ComputerGabriela FrederickNo ratings yet
- Advantages and Disadvantages MPDocument5 pagesAdvantages and Disadvantages MPVidhya AigalNo ratings yet
- Vtu 4TH Sem Cse Microprocessors Notes 10CS45Document125 pagesVtu 4TH Sem Cse Microprocessors Notes 10CS45EKTHATIGER63359095% (22)
- Packetmaster EX484-3 Web GUIDocument28 pagesPacketmaster EX484-3 Web GUIAmy LiNo ratings yet
- MPMC - 3.4 8086 - Multi-Processor - Min and Max ModeDocument12 pagesMPMC - 3.4 8086 - Multi-Processor - Min and Max ModesestokurtaNo ratings yet
- Module 4 MPDocument11 pagesModule 4 MPvreshmi885113No ratings yet
- Ce500 FactoryDocument9 pagesCe500 FactoryAgus HariyantoNo ratings yet
- Esa86882 UmDocument139 pagesEsa86882 UmVishnuTej VinjamuriNo ratings yet
- Coprocessor Configurations Closely Coupled Losely CoupledDocument9 pagesCoprocessor Configurations Closely Coupled Losely Coupledlauro eugin brittoNo ratings yet
- Presented by Dr. Md. Abir Hossain Dept. of ICT MbstuDocument28 pagesPresented by Dr. Md. Abir Hossain Dept. of ICT Mbstuit21007No ratings yet
- Unit 3Document28 pagesUnit 3usefulofworldNo ratings yet
- Physical AddressingDocument28 pagesPhysical AddressingRajiv SivalingamNo ratings yet
- Module 2 - Lecture 8Document24 pagesModule 2 - Lecture 8AQeNo ratings yet
- MPC5xxx Programming The eTPUDocument14 pagesMPC5xxx Programming The eTPUSAABNo ratings yet
- Lab 5Document5 pagesLab 5AliBaranIşıkNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedFrom EverandOperating Systems Interview Questions You'll Most Likely Be AskedNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- REF 630 Tech 756508 ENeDocument1,412 pagesREF 630 Tech 756508 ENeHugo GalarretaNo ratings yet
- LogDocument4 pagesLogberlianflasherNo ratings yet
- Eee 342 11 IoDocument33 pagesEee 342 11 IoHafiz Adil AsrarNo ratings yet
- Cloud Based Smart Energy MeterDocument10 pagesCloud Based Smart Energy MeterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exercises Subnet Mask and SubnettingDocument3 pagesExercises Subnet Mask and SubnettingMorn TheaNo ratings yet
- IT Unit 6 - Multi Threaded Programming and Exception Handling-1Document83 pagesIT Unit 6 - Multi Threaded Programming and Exception Handling-1shivaNo ratings yet
- ICT PackagingDocument19 pagesICT PackagingParnab ShanNo ratings yet
- Linux Question and AnswersDocument2 pagesLinux Question and AnswersBasarkar Sriker100% (1)
- UART ProtocolDocument6 pagesUART Protocolvimal rajNo ratings yet
- DW Technical Considerations Usb3 PDFDocument11 pagesDW Technical Considerations Usb3 PDFOfteniih OftenniihNo ratings yet
- ELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HDocument9 pagesELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HPindi Prince PindiNo ratings yet
- Venkateswara Reddy - JavaDocument10 pagesVenkateswara Reddy - JavaphaniNo ratings yet
- Online Application Monitoring ToolDocument43 pagesOnline Application Monitoring ToolMd Shaukat AliNo ratings yet
- 01 Introduction To Information Technology1Document74 pages01 Introduction To Information Technology1Collins OchiengNo ratings yet
- Unsolved Paper of ComputerDocument7 pagesUnsolved Paper of ComputerHarshit SanadhyaNo ratings yet
- EWS101 DatasheetDocument4 pagesEWS101 DatasheetZaw Lin HtutNo ratings yet
- How To Configure Azure Application Gateway To Forward Logs To EventTrackerDocument7 pagesHow To Configure Azure Application Gateway To Forward Logs To EventTrackercristian080989No ratings yet
- Cloud ComputingDocument19 pagesCloud ComputingDikshith RoshanNo ratings yet
- 8255 Peripheral Study CardDocument2 pages8255 Peripheral Study CardAmber ClarkNo ratings yet
- CCNA PART1 SlidesDocument60 pagesCCNA PART1 SlidesKhairullah OriaKhilNo ratings yet
- Line Modelling and EnergizationDocument6 pagesLine Modelling and EnergizationarunmozhiNo ratings yet
- 2019-12-04 18.12.20 CrashDocument5 pages2019-12-04 18.12.20 CrashrqNo ratings yet
- Calibre Perc Ds PDFDocument2 pagesCalibre Perc Ds PDFashwini32No ratings yet
- AMILO Pi 1505Document3 pagesAMILO Pi 1505dsijan2007No ratings yet
- Manual BasecamDocument118 pagesManual BasecamGermán BergerNo ratings yet
- DropboxDocument6 pagesDropboxNoor AfandyNo ratings yet
- Midterm SolutionsDocument10 pagesMidterm Solutionsdragon0962No ratings yet
- LogDocument24 pagesLogunhyadhiabhihauraNo ratings yet
- INPA HelpDocument14 pagesINPA HelpvicafreakNo ratings yet