
Pres
Pres
You might also like
- DNA of The GodsDocument150 pagesDNA of The Godsrobertofigueira100% (2)
- AllenDocument8 pagesAllenVallabhNo ratings yet
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionKash TorabiNo ratings yet
- 31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&SolDocument10 pages31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&Solprabha79gmNo ratings yet
- Sol JEEMain 12 Jan MorningDocument18 pagesSol JEEMain 12 Jan MorningRahul RajNo ratings yet
- T FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberDocument4 pagesT FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberHải Hoàng LýNo ratings yet
- 2022 JEE Main 4 SolutionDocument13 pages2022 JEE Main 4 SolutionADITYA RAJNo ratings yet
- Introduction To Machinery Dynamics Part 3Document5 pagesIntroduction To Machinery Dynamics Part 3Fatima NusserNo ratings yet
- Brain Bank - Solutions (P+C+M)Document380 pagesBrain Bank - Solutions (P+C+M)Saad Bin SiyadNo ratings yet
- Part - I (Physics) : MGH I MV I MVDocument10 pagesPart - I (Physics) : MGH I MV I MVpankajNo ratings yet
- Appendix X RayDocument15 pagesAppendix X RayThư CaoNo ratings yet
- Mecanismos ProblemaDocument2 pagesMecanismos ProblemaManuel ChavezNo ratings yet
- Schematic: Linkage - 4 - Bar - LockingDocument3 pagesSchematic: Linkage - 4 - Bar - LockingAndy YanNo ratings yet
- SOLUTION - 1.2-Circle Practice QuestionsDocument6 pagesSOLUTION - 1.2-Circle Practice QuestionsWilson Ernesto Frias FlorezNo ratings yet
- Narayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolDocument12 pagesNarayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolYuva AkhilNo ratings yet
- Assignment#2-EE 361/chapter 2: T T T T TDocument2 pagesAssignment#2-EE 361/chapter 2: T T T T TIbrahim SiddiquiNo ratings yet
- @TEAM VOICE 01 JEE Main 2022 28th June Morning Shift SolutionsDocument22 pages@TEAM VOICE 01 JEE Main 2022 28th June Morning Shift SolutionsVipplav Raj SinhaNo ratings yet
- Mock Ioqp Test 1 SolDocument20 pagesMock Ioqp Test 1 SolSantosh SinghNo ratings yet
- Preprints202007 0585 v1Document10 pagesPreprints202007 0585 v1IoannisVourdounisNo ratings yet
- 05 Electrostatics SupplDocument15 pages05 Electrostatics SupplccsingNo ratings yet
- 05 Electrostatics SupplyDocument15 pages05 Electrostatics SupplyccsingNo ratings yet
- 2022 Mock JEE Main-1 - SolutionsDocument19 pages2022 Mock JEE Main-1 - SolutionsAshish GuleriaNo ratings yet
- GTMnarayana PaperDocument20 pagesGTMnarayana PaperVishu PatryNo ratings yet
- T DT T: ConsiderDocument1 pageT DT T: ConsiderneetiNo ratings yet
- The Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial ForcesDocument73 pagesThe Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial Forcessohail ahmedNo ratings yet
- A.I.T.S. Part Test - 1 (Main) Solution - Dt. 09-11-2019Document16 pagesA.I.T.S. Part Test - 1 (Main) Solution - Dt. 09-11-2019Navya SharmaNo ratings yet
- 2022 JEE Main 17 SolutionsDocument14 pages2022 JEE Main 17 SolutionsHimanshu SinghNo ratings yet
- Tugas Turbin Resume Chapter 3-Two-Dimensional Cascades: Turbo CascadeDocument6 pagesTugas Turbin Resume Chapter 3-Two-Dimensional Cascades: Turbo CascadezuhdyNo ratings yet
- 2022 JEE Main Home Practice Test - 2 - Solution (@vmclectures On Telegram)Document15 pages2022 JEE Main Home Practice Test - 2 - Solution (@vmclectures On Telegram)muktibakshiNo ratings yet
- 2022 JEE Main 19 SolutionsDocument21 pages2022 JEE Main 19 SolutionsRajat Verma X D 39No ratings yet
- JEE 2024-ADVANCED Booster Test 1 SolutionsDocument15 pagesJEE 2024-ADVANCED Booster Test 1 Solutionsmrsonum527No ratings yet
- KInetics of Rigid Body - 2 - Work and EnergyDocument11 pagesKInetics of Rigid Body - 2 - Work and EnergyDaffa Hafiz ZaidanNo ratings yet
- 11) Machine Design IDocument13 pages11) Machine Design IDrMohamed MansourNo ratings yet
- Dec 2011 PDFDocument10 pagesDec 2011 PDFsamphysics95No ratings yet
- Physics Advanced Level Problem Solving (ALPS-3) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-3) - SolutionRachit JainNo ratings yet
- 01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sDocument15 pages01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- Assignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Document2 pagesAssignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Shahzaib NadeemNo ratings yet
- Physics Advanced Level Problem Solving (ALPS-7) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-7) - SolutionAnanmay ChauhanNo ratings yet
- JEEmain 26 Augshift 1Document53 pagesJEEmain 26 Augshift 1Nirmala GutamNo ratings yet
- Finite Element Method: Plane and Axisymmetric Elastic ProblemsDocument55 pagesFinite Element Method: Plane and Axisymmetric Elastic ProblemsHalef Michel Bou KarimNo ratings yet
- Chapter 6 - 12 QuestionsDocument4 pagesChapter 6 - 12 Questionsmaqyla naquelNo ratings yet
- Rigid RotorDocument38 pagesRigid RotorSergeyNo ratings yet
- Physics Formula SheetsDocument1 pagePhysics Formula SheetsIdk KkksNo ratings yet
- 24.12.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-14 - KEY & SOLDocument12 pages24.12.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-14 - KEY & SOLONLY SPIDEYNo ratings yet
- Electric Force & Electric Field IDocument60 pagesElectric Force & Electric Field IImran ParvezNo ratings yet
- 17 05 20 - CAT 42 - KeyDocument13 pages17 05 20 - CAT 42 - KeyPonharish kumar.JNo ratings yet
- This Study Resource Was: Flutter Analysis of A 2-DOF SystemDocument8 pagesThis Study Resource Was: Flutter Analysis of A 2-DOF Systemmahdi ShamsNo ratings yet
- Light Scattering: Basics: R K T E EDocument18 pagesLight Scattering: Basics: R K T E ESimo SoreNo ratings yet
- Quadratic and Inequations 4 SolnsDocument16 pagesQuadratic and Inequations 4 SolnsB GALANo ratings yet
- Topic 4 - Energy PrincipleDocument77 pagesTopic 4 - Energy PrincipleAmier ThaqifNo ratings yet
- TestDocument3 pagesTestDanish ZubairNo ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- Sr. Grand Test Key and HintsDocument7 pagesSr. Grand Test Key and HintsM JEEVARATHNAM NAIDUNo ratings yet
- The Chaotic Motion of A Double PendulumDocument24 pagesThe Chaotic Motion of A Double PendulumjuanNo ratings yet
- 413K_Advanc Test 15_Date 16.04.2024_Sol (4)Document12 pages413K_Advanc Test 15_Date 16.04.2024_Sol (4)harshitsahu1907No ratings yet
- Quantum Mechanics JEST 2012-2017Document30 pagesQuantum Mechanics JEST 2012-2017anup_sky88No ratings yet
- Objectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodDocument6 pagesObjectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodGabriel IulianNo ratings yet
- TEST 1 - Atomic Structure (Answer)Document6 pagesTEST 1 - Atomic Structure (Answer)XB44.SouraTanay RoyNo ratings yet
- Optimization of Wind Engine SpeedDocument6 pagesOptimization of Wind Engine SpeedAcademic JournalNo ratings yet
- JEE 2023 Full Length Revision Test - 2 - SolutionsDocument12 pagesJEE 2023 Full Length Revision Test - 2 - SolutionsGarv JoshiNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Power Point of Repo & ProDocument81 pagesPower Point of Repo & ProKirubel MogesNo ratings yet
- Business-WPS OfficeDocument3 pagesBusiness-WPS OfficeKirubel MogesNo ratings yet
- Final Project ProgressDocument22 pagesFinal Project ProgressKirubel MogesNo ratings yet
- Final Project ProgressDocument22 pagesFinal Project ProgressKirubel MogesNo ratings yet
- Wel Come To Our Presentation On Manufacturing and Testing of Over Flow Type Treadle PumpDocument33 pagesWel Come To Our Presentation On Manufacturing and Testing of Over Flow Type Treadle PumpKirubel MogesNo ratings yet
- MenggabozDocument103 pagesMenggabozKirubel MogesNo ratings yet
- MD & AT FinalDocument27 pagesMD & AT FinalKirubel MogesNo ratings yet
- Araya& Melaku 2002finalDocument86 pagesAraya& Melaku 2002finalKirubel MogesNo ratings yet
- Power Point Presentation For Foot Driven Centrifugal PumpabebawDocument30 pagesPower Point Presentation For Foot Driven Centrifugal PumpabebawKirubel MogesNo ratings yet
- Full ReportDocument113 pagesFull ReportKirubel MogesNo ratings yet
- Elevator Project Powerpoint2003Document35 pagesElevator Project Powerpoint2003Kirubel MogesNo ratings yet
- Design of Liner Puller PresentationDocument29 pagesDesign of Liner Puller PresentationKirubel MogesNo ratings yet
- Beni &kahsiDocument28 pagesBeni &kahsiKirubel MogesNo ratings yet
- Complet 5TH Year Final Thesis ProjectDocument116 pagesComplet 5TH Year Final Thesis ProjectKirubel MogesNo ratings yet
- AALRT Visit ReportDocument16 pagesAALRT Visit ReportKirubel MogesNo ratings yet
- Presentation of Welding RobotDocument28 pagesPresentation of Welding RobotKirubel MogesNo ratings yet
- Asphalt Cleaner MachineDocument85 pagesAsphalt Cleaner MachineKirubel MogesNo ratings yet
- Rolling Stock Construction, Article Review, K & YDocument13 pagesRolling Stock Construction, Article Review, K & YKirubel MogesNo ratings yet
- Chapter 7 Chemical Bonding and Molecular GeometryDocument211 pagesChapter 7 Chemical Bonding and Molecular Geometryonline purchaseNo ratings yet
- IB Chemistry - SL Topic 2 Questions 1.: (Total 1 Mark)Document22 pagesIB Chemistry - SL Topic 2 Questions 1.: (Total 1 Mark)Francesco GiacomettiNo ratings yet
- Lecture 4Document11 pagesLecture 4Yogesh SharmaNo ratings yet
- Crystallization and TGDocument26 pagesCrystallization and TGJILLIAN DALUPONo ratings yet
- Ultrasonics Sonochemistry: Xiangning Bu, Muidh AlheshibriDocument11 pagesUltrasonics Sonochemistry: Xiangning Bu, Muidh AlheshibriatulhbariNo ratings yet
- 3315 Math Syllabus PDFDocument2 pages3315 Math Syllabus PDFMaxwell LongNo ratings yet
- Donald E. Wilcox Et Al - Location of Mach Discs and Diamonds in Supersonic Air JetsDocument2 pagesDonald E. Wilcox Et Al - Location of Mach Discs and Diamonds in Supersonic Air JetsDeez34PNo ratings yet
- Pressure and Pressure Measuring Devices: Brownian Motion", Due To WhichDocument23 pagesPressure and Pressure Measuring Devices: Brownian Motion", Due To WhichSamuel GaétanNo ratings yet
- On Phase ChangesDocument28 pagesOn Phase Changesapi-313517608No ratings yet
- Fineness of Portland Cement by The Turbidimeter: Standard Test Method ForDocument7 pagesFineness of Portland Cement by The Turbidimeter: Standard Test Method ForAlejandroNo ratings yet
- Chapter #6 Study GuideDocument6 pagesChapter #6 Study GuideAmanda BartleyNo ratings yet
- Mat 087 TheoryDocument3 pagesMat 087 Theorymustafa sertNo ratings yet
- Teodoro Chapter 19Document21 pagesTeodoro Chapter 19Reinzo GallegoNo ratings yet
- Optimization in Heat Transfer ProcessDocument7 pagesOptimization in Heat Transfer Processnp484No ratings yet
- Science Book - 10 - OnlineDocument266 pagesScience Book - 10 - OnlineShrestha PratikNo ratings yet
- WBJEE Sample Paper-7 (WBJEE 2014 Physics Chemistry Keys Solution)Document30 pagesWBJEE Sample Paper-7 (WBJEE 2014 Physics Chemistry Keys Solution)Firdosh KhanNo ratings yet
- Hydraulics II - Chapter 2Document13 pagesHydraulics II - Chapter 2Kefene GurmessaNo ratings yet
- University of Zimbabwe Faculty of Engineering Department of Electrical Engineering EE202 TutorialDocument4 pagesUniversity of Zimbabwe Faculty of Engineering Department of Electrical Engineering EE202 TutorialTatenda BizureNo ratings yet
- Expt 7 Rotor System Lab Manual MFS PDFDocument3 pagesExpt 7 Rotor System Lab Manual MFS PDFshanmugamNo ratings yet
- (Geology and Mineralogy Research Developments) Wilfred Carter, Wilfred Carter-Crystals and Crystal Growth-Nova Science Publishers, Inc. (2015)Document110 pages(Geology and Mineralogy Research Developments) Wilfred Carter, Wilfred Carter-Crystals and Crystal Growth-Nova Science Publishers, Inc. (2015)DesyAAlvrida0% (1)
- (Dry Type Transformer)Document23 pages(Dry Type Transformer)togirishsharmaNo ratings yet
- Exercise 02 - BKF1313 Chapter 2 Part 2Document2 pagesExercise 02 - BKF1313 Chapter 2 Part 2Cornelius PhilipNo ratings yet
- Earthquakes and Earthquake Prediction: Andrei GabrielovDocument37 pagesEarthquakes and Earthquake Prediction: Andrei GabrielovEugene MirasNo ratings yet
- Fundamentals of SoundDocument26 pagesFundamentals of SoundmishraenggNo ratings yet
- Etth 2 PDFDocument2 pagesEtth 2 PDFIñigo de LoyolaNo ratings yet
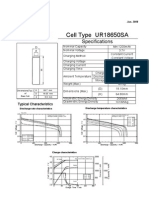
- Sanyo 1300mah UR18650SADocument1 pageSanyo 1300mah UR18650SAStreet_skNo ratings yet
- T7.3 Example FrameDocument17 pagesT7.3 Example FrameUpdirahman MohamoudNo ratings yet
- Test Rig Landing Gear Free-Fall System Model Simulation and Design Optimization Using MatlaDocument10 pagesTest Rig Landing Gear Free-Fall System Model Simulation and Design Optimization Using MatlaMuhammad Hadi WidantoNo ratings yet
- Soil - Structure Interaction: - Thurumella JayanthDocument17 pagesSoil - Structure Interaction: - Thurumella JayanthriddhisnewworldNo ratings yet











































































































Download as ppt, pdf, or txt
You might also like
- DNA of The GodsDocument150 pagesDNA of The Godsrobertofigueira100% (2)
- AllenDocument8 pagesAllenVallabhNo ratings yet
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionKash TorabiNo ratings yet
- 31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&SolDocument10 pages31-12-2323 JR - Star Co-Sc (Model-B) Jee Main Ctm-28 Key&Solprabha79gmNo ratings yet
- Sol JEEMain 12 Jan MorningDocument18 pagesSol JEEMain 12 Jan MorningRahul RajNo ratings yet
- T FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberDocument4 pagesT FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberHải Hoàng LýNo ratings yet
- 2022 JEE Main 4 SolutionDocument13 pages2022 JEE Main 4 SolutionADITYA RAJNo ratings yet
- Introduction To Machinery Dynamics Part 3Document5 pagesIntroduction To Machinery Dynamics Part 3Fatima NusserNo ratings yet
- Brain Bank - Solutions (P+C+M)Document380 pagesBrain Bank - Solutions (P+C+M)Saad Bin SiyadNo ratings yet
- Part - I (Physics) : MGH I MV I MVDocument10 pagesPart - I (Physics) : MGH I MV I MVpankajNo ratings yet
- Appendix X RayDocument15 pagesAppendix X RayThư CaoNo ratings yet
- Mecanismos ProblemaDocument2 pagesMecanismos ProblemaManuel ChavezNo ratings yet
- Schematic: Linkage - 4 - Bar - LockingDocument3 pagesSchematic: Linkage - 4 - Bar - LockingAndy YanNo ratings yet
- SOLUTION - 1.2-Circle Practice QuestionsDocument6 pagesSOLUTION - 1.2-Circle Practice QuestionsWilson Ernesto Frias FlorezNo ratings yet
- Narayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolDocument12 pagesNarayana 30-05-2022 Outgoing SR Jee Main Model GTM 4 QP Final SolYuva AkhilNo ratings yet
- Assignment#2-EE 361/chapter 2: T T T T TDocument2 pagesAssignment#2-EE 361/chapter 2: T T T T TIbrahim SiddiquiNo ratings yet
- @TEAM VOICE 01 JEE Main 2022 28th June Morning Shift SolutionsDocument22 pages@TEAM VOICE 01 JEE Main 2022 28th June Morning Shift SolutionsVipplav Raj SinhaNo ratings yet
- Mock Ioqp Test 1 SolDocument20 pagesMock Ioqp Test 1 SolSantosh SinghNo ratings yet
- Preprints202007 0585 v1Document10 pagesPreprints202007 0585 v1IoannisVourdounisNo ratings yet
- 05 Electrostatics SupplDocument15 pages05 Electrostatics SupplccsingNo ratings yet
- 05 Electrostatics SupplyDocument15 pages05 Electrostatics SupplyccsingNo ratings yet
- 2022 Mock JEE Main-1 - SolutionsDocument19 pages2022 Mock JEE Main-1 - SolutionsAshish GuleriaNo ratings yet
- GTMnarayana PaperDocument20 pagesGTMnarayana PaperVishu PatryNo ratings yet
- T DT T: ConsiderDocument1 pageT DT T: ConsiderneetiNo ratings yet
- The Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial ForcesDocument73 pagesThe Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial Forcessohail ahmedNo ratings yet
- A.I.T.S. Part Test - 1 (Main) Solution - Dt. 09-11-2019Document16 pagesA.I.T.S. Part Test - 1 (Main) Solution - Dt. 09-11-2019Navya SharmaNo ratings yet
- 2022 JEE Main 17 SolutionsDocument14 pages2022 JEE Main 17 SolutionsHimanshu SinghNo ratings yet
- Tugas Turbin Resume Chapter 3-Two-Dimensional Cascades: Turbo CascadeDocument6 pagesTugas Turbin Resume Chapter 3-Two-Dimensional Cascades: Turbo CascadezuhdyNo ratings yet
- 2022 JEE Main Home Practice Test - 2 - Solution (@vmclectures On Telegram)Document15 pages2022 JEE Main Home Practice Test - 2 - Solution (@vmclectures On Telegram)muktibakshiNo ratings yet
- 2022 JEE Main 19 SolutionsDocument21 pages2022 JEE Main 19 SolutionsRajat Verma X D 39No ratings yet
- JEE 2024-ADVANCED Booster Test 1 SolutionsDocument15 pagesJEE 2024-ADVANCED Booster Test 1 Solutionsmrsonum527No ratings yet
- KInetics of Rigid Body - 2 - Work and EnergyDocument11 pagesKInetics of Rigid Body - 2 - Work and EnergyDaffa Hafiz ZaidanNo ratings yet
- 11) Machine Design IDocument13 pages11) Machine Design IDrMohamed MansourNo ratings yet
- Dec 2011 PDFDocument10 pagesDec 2011 PDFsamphysics95No ratings yet
- Physics Advanced Level Problem Solving (ALPS-3) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-3) - SolutionRachit JainNo ratings yet
- 01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sDocument15 pages01-01-17 - SR - IIT-IZ-CO-SPARK - Jee - Adv (2014 - P2) - RPTA-16 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- Assignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Document2 pagesAssignment#2-EE 361/chapter 2: Hand Over To TA: Before The Start of Quiz 1 (Hand Written Form) (CLO-1)Shahzaib NadeemNo ratings yet
- Physics Advanced Level Problem Solving (ALPS-7) - SolutionDocument12 pagesPhysics Advanced Level Problem Solving (ALPS-7) - SolutionAnanmay ChauhanNo ratings yet
- JEEmain 26 Augshift 1Document53 pagesJEEmain 26 Augshift 1Nirmala GutamNo ratings yet
- Finite Element Method: Plane and Axisymmetric Elastic ProblemsDocument55 pagesFinite Element Method: Plane and Axisymmetric Elastic ProblemsHalef Michel Bou KarimNo ratings yet
- Chapter 6 - 12 QuestionsDocument4 pagesChapter 6 - 12 Questionsmaqyla naquelNo ratings yet
- Rigid RotorDocument38 pagesRigid RotorSergeyNo ratings yet
- Physics Formula SheetsDocument1 pagePhysics Formula SheetsIdk KkksNo ratings yet
- 24.12.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-14 - KEY & SOLDocument12 pages24.12.22 - SR - STAR CO-SC (MODEL-A & B) - Jee - Main - PTM-14 - KEY & SOLONLY SPIDEYNo ratings yet
- Electric Force & Electric Field IDocument60 pagesElectric Force & Electric Field IImran ParvezNo ratings yet
- 17 05 20 - CAT 42 - KeyDocument13 pages17 05 20 - CAT 42 - KeyPonharish kumar.JNo ratings yet
- This Study Resource Was: Flutter Analysis of A 2-DOF SystemDocument8 pagesThis Study Resource Was: Flutter Analysis of A 2-DOF Systemmahdi ShamsNo ratings yet
- Light Scattering: Basics: R K T E EDocument18 pagesLight Scattering: Basics: R K T E ESimo SoreNo ratings yet
- Quadratic and Inequations 4 SolnsDocument16 pagesQuadratic and Inequations 4 SolnsB GALANo ratings yet
- Topic 4 - Energy PrincipleDocument77 pagesTopic 4 - Energy PrincipleAmier ThaqifNo ratings yet
- TestDocument3 pagesTestDanish ZubairNo ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- Sr. Grand Test Key and HintsDocument7 pagesSr. Grand Test Key and HintsM JEEVARATHNAM NAIDUNo ratings yet
- The Chaotic Motion of A Double PendulumDocument24 pagesThe Chaotic Motion of A Double PendulumjuanNo ratings yet
- 413K_Advanc Test 15_Date 16.04.2024_Sol (4)Document12 pages413K_Advanc Test 15_Date 16.04.2024_Sol (4)harshitsahu1907No ratings yet
- Quantum Mechanics JEST 2012-2017Document30 pagesQuantum Mechanics JEST 2012-2017anup_sky88No ratings yet
- Objectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodDocument6 pagesObjectives: Laboratory 4. The Analytical Kinematics of Mechanisms With The Vector MethodGabriel IulianNo ratings yet
- TEST 1 - Atomic Structure (Answer)Document6 pagesTEST 1 - Atomic Structure (Answer)XB44.SouraTanay RoyNo ratings yet
- Optimization of Wind Engine SpeedDocument6 pagesOptimization of Wind Engine SpeedAcademic JournalNo ratings yet
- JEE 2023 Full Length Revision Test - 2 - SolutionsDocument12 pagesJEE 2023 Full Length Revision Test - 2 - SolutionsGarv JoshiNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Power Point of Repo & ProDocument81 pagesPower Point of Repo & ProKirubel MogesNo ratings yet
- Business-WPS OfficeDocument3 pagesBusiness-WPS OfficeKirubel MogesNo ratings yet
- Final Project ProgressDocument22 pagesFinal Project ProgressKirubel MogesNo ratings yet
- Final Project ProgressDocument22 pagesFinal Project ProgressKirubel MogesNo ratings yet
- Wel Come To Our Presentation On Manufacturing and Testing of Over Flow Type Treadle PumpDocument33 pagesWel Come To Our Presentation On Manufacturing and Testing of Over Flow Type Treadle PumpKirubel MogesNo ratings yet
- MenggabozDocument103 pagesMenggabozKirubel MogesNo ratings yet
- MD & AT FinalDocument27 pagesMD & AT FinalKirubel MogesNo ratings yet
- Araya& Melaku 2002finalDocument86 pagesAraya& Melaku 2002finalKirubel MogesNo ratings yet
- Power Point Presentation For Foot Driven Centrifugal PumpabebawDocument30 pagesPower Point Presentation For Foot Driven Centrifugal PumpabebawKirubel MogesNo ratings yet
- Full ReportDocument113 pagesFull ReportKirubel MogesNo ratings yet
- Elevator Project Powerpoint2003Document35 pagesElevator Project Powerpoint2003Kirubel MogesNo ratings yet
- Design of Liner Puller PresentationDocument29 pagesDesign of Liner Puller PresentationKirubel MogesNo ratings yet
- Beni &kahsiDocument28 pagesBeni &kahsiKirubel MogesNo ratings yet
- Complet 5TH Year Final Thesis ProjectDocument116 pagesComplet 5TH Year Final Thesis ProjectKirubel MogesNo ratings yet
- AALRT Visit ReportDocument16 pagesAALRT Visit ReportKirubel MogesNo ratings yet
- Presentation of Welding RobotDocument28 pagesPresentation of Welding RobotKirubel MogesNo ratings yet
- Asphalt Cleaner MachineDocument85 pagesAsphalt Cleaner MachineKirubel MogesNo ratings yet
- Rolling Stock Construction, Article Review, K & YDocument13 pagesRolling Stock Construction, Article Review, K & YKirubel MogesNo ratings yet
- Chapter 7 Chemical Bonding and Molecular GeometryDocument211 pagesChapter 7 Chemical Bonding and Molecular Geometryonline purchaseNo ratings yet
- IB Chemistry - SL Topic 2 Questions 1.: (Total 1 Mark)Document22 pagesIB Chemistry - SL Topic 2 Questions 1.: (Total 1 Mark)Francesco GiacomettiNo ratings yet
- Lecture 4Document11 pagesLecture 4Yogesh SharmaNo ratings yet
- Crystallization and TGDocument26 pagesCrystallization and TGJILLIAN DALUPONo ratings yet
- Ultrasonics Sonochemistry: Xiangning Bu, Muidh AlheshibriDocument11 pagesUltrasonics Sonochemistry: Xiangning Bu, Muidh AlheshibriatulhbariNo ratings yet
- 3315 Math Syllabus PDFDocument2 pages3315 Math Syllabus PDFMaxwell LongNo ratings yet
- Donald E. Wilcox Et Al - Location of Mach Discs and Diamonds in Supersonic Air JetsDocument2 pagesDonald E. Wilcox Et Al - Location of Mach Discs and Diamonds in Supersonic Air JetsDeez34PNo ratings yet
- Pressure and Pressure Measuring Devices: Brownian Motion", Due To WhichDocument23 pagesPressure and Pressure Measuring Devices: Brownian Motion", Due To WhichSamuel GaétanNo ratings yet
- On Phase ChangesDocument28 pagesOn Phase Changesapi-313517608No ratings yet
- Fineness of Portland Cement by The Turbidimeter: Standard Test Method ForDocument7 pagesFineness of Portland Cement by The Turbidimeter: Standard Test Method ForAlejandroNo ratings yet
- Chapter #6 Study GuideDocument6 pagesChapter #6 Study GuideAmanda BartleyNo ratings yet
- Mat 087 TheoryDocument3 pagesMat 087 Theorymustafa sertNo ratings yet
- Teodoro Chapter 19Document21 pagesTeodoro Chapter 19Reinzo GallegoNo ratings yet
- Optimization in Heat Transfer ProcessDocument7 pagesOptimization in Heat Transfer Processnp484No ratings yet
- Science Book - 10 - OnlineDocument266 pagesScience Book - 10 - OnlineShrestha PratikNo ratings yet
- WBJEE Sample Paper-7 (WBJEE 2014 Physics Chemistry Keys Solution)Document30 pagesWBJEE Sample Paper-7 (WBJEE 2014 Physics Chemistry Keys Solution)Firdosh KhanNo ratings yet
- Hydraulics II - Chapter 2Document13 pagesHydraulics II - Chapter 2Kefene GurmessaNo ratings yet
- University of Zimbabwe Faculty of Engineering Department of Electrical Engineering EE202 TutorialDocument4 pagesUniversity of Zimbabwe Faculty of Engineering Department of Electrical Engineering EE202 TutorialTatenda BizureNo ratings yet
- Expt 7 Rotor System Lab Manual MFS PDFDocument3 pagesExpt 7 Rotor System Lab Manual MFS PDFshanmugamNo ratings yet
- (Geology and Mineralogy Research Developments) Wilfred Carter, Wilfred Carter-Crystals and Crystal Growth-Nova Science Publishers, Inc. (2015)Document110 pages(Geology and Mineralogy Research Developments) Wilfred Carter, Wilfred Carter-Crystals and Crystal Growth-Nova Science Publishers, Inc. (2015)DesyAAlvrida0% (1)
- (Dry Type Transformer)Document23 pages(Dry Type Transformer)togirishsharmaNo ratings yet
- Exercise 02 - BKF1313 Chapter 2 Part 2Document2 pagesExercise 02 - BKF1313 Chapter 2 Part 2Cornelius PhilipNo ratings yet
- Earthquakes and Earthquake Prediction: Andrei GabrielovDocument37 pagesEarthquakes and Earthquake Prediction: Andrei GabrielovEugene MirasNo ratings yet
- Fundamentals of SoundDocument26 pagesFundamentals of SoundmishraenggNo ratings yet
- Etth 2 PDFDocument2 pagesEtth 2 PDFIñigo de LoyolaNo ratings yet
- Sanyo 1300mah UR18650SADocument1 pageSanyo 1300mah UR18650SAStreet_skNo ratings yet
- T7.3 Example FrameDocument17 pagesT7.3 Example FrameUpdirahman MohamoudNo ratings yet
- Test Rig Landing Gear Free-Fall System Model Simulation and Design Optimization Using MatlaDocument10 pagesTest Rig Landing Gear Free-Fall System Model Simulation and Design Optimization Using MatlaMuhammad Hadi WidantoNo ratings yet
- Soil - Structure Interaction: - Thurumella JayanthDocument17 pagesSoil - Structure Interaction: - Thurumella JayanthriddhisnewworldNo ratings yet