Download as pptx, pdf, or txt
You might also like
- De Cuong NL-CTM k15 - 2021 NewDocument6 pagesDe Cuong NL-CTM k15 - 2021 NewHằng NguyễnNo ratings yet
- Chapter 2 (Vietnamese)Document48 pagesChapter 2 (Vietnamese)Huỳnh Quốc DũngNo ratings yet
- Automatic TransmissionDocument51 pagesAutomatic TransmissionThang TongNo ratings yet
- đề 31Document12 pagesđề 31Nam HoàngNo ratings yet
- 5 - TD Truc vit-TCDocument42 pages5 - TD Truc vit-TCkhang dongNo ratings yet
- 1b.hộp SốDocument63 pages1b.hộp SốTran Nguyen Quoc BaoNo ratings yet
- 2023 HuongdangiaiBaitapDocument12 pages2023 HuongdangiaiBaitapjjong260No ratings yet
- Chuong 5Document58 pagesChuong 5Thiên PhạmNo ratings yet
- BT - HỆ BÁNH RĂNGDocument7 pagesBT - HỆ BÁNH RĂNGKhiêm Huỳnh TấnNo ratings yet
- TKOTDocument32 pagesTKOTQuoc NguyenNo ratings yet
- MCC - Chuong 2 - Phan III - Gưi SVDocument14 pagesMCC - Chuong 2 - Phan III - Gưi SVsonaht123No ratings yet
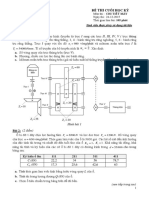
- Cho hệ thống dẫn động cơ khí như hình vẽ 1. Hãy phân tích lực tác dụng lên các bộ truyền tham gia truyền chuyển độngDocument21 pagesCho hệ thống dẫn động cơ khí như hình vẽ 1. Hãy phân tích lực tác dụng lên các bộ truyền tham gia truyền chuyển độngTiến TrươngNo ratings yet
- Bài Tập-bộ Truyền Trục VítDocument3 pagesBài Tập-bộ Truyền Trục VítSinh ĐặngNo ratings yet
- C - 12. Hệ thống bánh răngDocument13 pagesC - 12. Hệ thống bánh răngAnh HuyNo ratings yet
- Bai Tap Chuong Bo Truyen Banh RangDocument6 pagesBai Tap Chuong Bo Truyen Banh RangVăn Thành NguyễnNo ratings yet
- De Thi Cuoi Ky CHI TIET MAY 24.12.2015Document2 pagesDe Thi Cuoi Ky CHI TIET MAY 24.12.2015Nguyễn Hữu Hải LuânNo ratings yet
- Chuong 04 - Truyen Dong Truc VitDocument38 pagesChuong 04 - Truyen Dong Truc Vithoanboy2610No ratings yet
- Chương 4: Truyền Động Trục VítDocument55 pagesChương 4: Truyền Động Trục VítChính NguyễnNo ratings yet
- Bài tập tính trụcDocument4 pagesBài tập tính trụcThinh NguyenNo ratings yet
- BÀI TẬP CHƯƠNG TRỤC-VÍT ĐAI ỐCDocument5 pagesBÀI TẬP CHƯƠNG TRỤC-VÍT ĐAI ỐCSinh ĐặngNo ratings yet
- BT He BR Nang CaoDocument4 pagesBT He BR Nang CaoNgo TuandungNo ratings yet
- Giải Bài Tập- Trục VítDocument8 pagesGiải Bài Tập- Trục VítTuan AnhNo ratings yet
- Chuong 9 He Banh RangDocument4 pagesChuong 9 He Banh RangHa HaiNo ratings yet
- Khi Nen Hoan ThanhDocument9 pagesKhi Nen Hoan ThanhtamNo ratings yet
- Giáo trình MÁY TIỆN - MÁY KHOAN - MÁY DOA - 888354Document35 pagesGiáo trình MÁY TIỆN - MÁY KHOAN - MÁY DOA - 888354Nguyễn Hoàng Ngọc MinhNo ratings yet
- Manual TransmissionDocument49 pagesManual TransmissionThang TongNo ratings yet
- Bai Tap Truyen Dong Banh RangDocument20 pagesBai Tap Truyen Dong Banh RangĐậu Xuân KhoaNo ratings yet
- Thiết kế trục Mẫu đề số 4Document20 pagesThiết kế trục Mẫu đề số 4Tiến Đỗ VănNo ratings yet
- 8.chuong 8 Truyen Dong Truc VitDocument18 pages8.chuong 8 Truyen Dong Truc Vitdinhvangiang12091999No ratings yet
- Bài 6 - Đề Cương Bài GiảngDocument11 pagesBài 6 - Đề Cương Bài Giảngtranhoan95959No ratings yet
- Chuong 3 - Truyen Dong Dong Co Dien KĐBDocument71 pagesChuong 3 - Truyen Dong Dong Co Dien KĐBHuỳnh Đức ToànNo ratings yet
- Chuong 8 He Thong Banh RangDocument12 pagesChuong 8 He Thong Banh RangQuang PhạmNo ratings yet
- De Cuong Van Dap NL-CTM-2021-2022Document7 pagesDe Cuong Van Dap NL-CTM-2021-2022thanh vu longNo ratings yet
- bài soạn thảoDocument9 pagesbài soạn thảoMạnh Hồ Sỹ Trần ĐứcNo ratings yet
- TT TK RobotDocument31 pagesTT TK RobotNinh Nguyễn CôngNo ratings yet
- Huong Dan Thiet Ke HDDCKDocument42 pagesHuong Dan Thiet Ke HDDCKphamcongchuc2405No ratings yet
- GIẢI HỆ BÁNH RĂNGDocument11 pagesGIẢI HỆ BÁNH RĂNGPercent 91No ratings yet
- Mẫu BTL4. TrụcDocument19 pagesMẫu BTL4. Trụcdu.tran05No ratings yet
- Chuong 6-TV-BVDocument33 pagesChuong 6-TV-BVNguyễn Minh HảoNo ratings yet
- Chuong 4 - HE Truyen Dong Dong Co Khong Dong BoDocument121 pagesChuong 4 - HE Truyen Dong Dong Co Khong Dong BoĐức Nguyễn NgọcNo ratings yet
- 8. Thiết kế trụcDocument3 pages8. Thiết kế trụctrung uyên nguyễnNo ratings yet
- Chuong 10Document20 pagesChuong 10Thiên PhạmNo ratings yet
- 05. Ứng Dụng Tin Học Trong Chi Tiết MáyDocument25 pages05. Ứng Dụng Tin Học Trong Chi Tiết MáyLinh HoNo ratings yet
- Bài 5 - báo cáo thực tậpDocument1 pageBài 5 - báo cáo thực tậpPew ChocopieeNo ratings yet
- Vũ Quang Huy TKMHDocument28 pagesVũ Quang Huy TKMHnaruto7a2002No ratings yet
- De Cuong Van Dap Nl-ctm-k15Document8 pagesDe Cuong Van Dap Nl-ctm-k15Dai NgoNo ratings yet
- 5.bang Tom Tat Cac Thong So Thiet KeDocument9 pages5.bang Tom Tat Cac Thong So Thiet KeLa Hong LeNo ratings yet
- Chuong5 LTM1 HoCam 2023Document60 pagesChuong5 LTM1 HoCam 2023hungthacba04No ratings yet
- CHƯƠNG 4 TRUYỀN ĐỘNG ĐAI MEMDDocument25 pagesCHƯƠNG 4 TRUYỀN ĐỘNG ĐAI MEMDTran Huy HauNo ratings yet
- Đ Án Ô Tô WordDocument9 pagesĐ Án Ô Tô WordChiêu AnhNo ratings yet
- Sinh viên: B Ộ Môn Thiết Kế MáyDocument2 pagesSinh viên: B Ộ Môn Thiết Kế MáyHUY HUỲNH CHÂU QUỐCNo ratings yet
- Bai Tap Truyen Dong Banh RangDocument20 pagesBai Tap Truyen Dong Banh RangTấn ThànhNo ratings yet
- 4. Bài 3. Mô phỏng hệ thống láiDocument18 pages4. Bài 3. Mô phỏng hệ thống láiĐoàn Xuân NamNo ratings yet
- Giáo Trình Phay Bánh Răng, Thanh RăngDocument11 pagesGiáo Trình Phay Bánh Răng, Thanh RăngTieu Ngoc LyNo ratings yet
- Bai Tap Chuong 12Document3 pagesBai Tap Chuong 12Vũ Mạnh CườngNo ratings yet
- Giải Hệ Bánh RăngDocument11 pagesGiải Hệ Bánh RăngKhoa NguyễnNo ratings yet
- TÍNH TOÁN THIẾT KẾ TRỤC, THEN, KHỚP NỐIDocument40 pagesTÍNH TOÁN THIẾT KẾ TRỤC, THEN, KHỚP NỐILayla VuNo ratings yet
- Chuong5 LTM1 HoCam 2021Document55 pagesChuong5 LTM1 HoCam 2021tuấn nguyễnNo ratings yet
- THIẾT KẾ MÔN HỌC 12Document29 pagesTHIẾT KẾ MÔN HỌC 12letuanthanh3011No ratings yet