Download as pptx, pdf, or txt
You might also like
- Lab 4 Submission - Programming PIC18 TimersDocument6 pagesLab 4 Submission - Programming PIC18 TimersSravyaNo ratings yet
- Cdd156195-Amplificador de Audifonos HA400 Diagrama EsquematicoDocument1 pageCdd156195-Amplificador de Audifonos HA400 Diagrama EsquematicoMarcos E. CuevasNo ratings yet
- WiringDocument28 pagesWiringFriendy PrasetiawanNo ratings yet
- Pic Microcontroller - Class NotesDocument26 pagesPic Microcontroller - Class NotesNarasimha Murthy Yayavaram80% (25)
- PICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS CDocument135 pagesPICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS Cvaibhav6820100% (34)
- 2022 NSpa-A2 - Floor Pattern Layout-8Sept-A2Document1 page2022 NSpa-A2 - Floor Pattern Layout-8Sept-A2jemson.icdcNo ratings yet
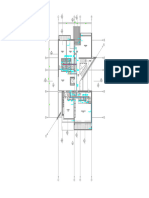
- M Villa WS 103Document1 pageM Villa WS 103salman mahdiNo ratings yet
- Gol G3 Magnet Mareli Modelo - 2Document8 pagesGol G3 Magnet Mareli Modelo - 2tmrodriguestechmalhasNo ratings yet
- Stacks and SubroutineDocument23 pagesStacks and Subroutinesirisha_cseNo ratings yet
- FUS 3D Flanges FZF, FUFDocument1 pageFUS 3D Flanges FZF, FUFArunKumar RajendranNo ratings yet
- Halfwidth and Fullwidth Forms: Range: FF00-FFEFDocument7 pagesHalfwidth and Fullwidth Forms: Range: FF00-FFEFDiego A Brito DominguezNo ratings yet
- Serban Nichifor: Prayer, Act of Consecration, 25 March 2022Document5 pagesSerban Nichifor: Prayer, Act of Consecration, 25 March 2022Serban NichiforNo ratings yet
- Arta - Dynacore: Proposed Two Storey Residential House Sps. Dr. Alvin de Aquino Mrs. Anne Malolos-De AquinoDocument1 pageArta - Dynacore: Proposed Two Storey Residential House Sps. Dr. Alvin de Aquino Mrs. Anne Malolos-De Aquinorogelio sorianoNo ratings yet
- LookieDocument52 pagesLookieAustin JohnsonNo ratings yet
- Formatted NVRAMDocument1 pageFormatted NVRAMAnthony August ArcherNo ratings yet
- Report OpenDocument6 pagesReport Opengusion21assaNo ratings yet
- HW MonitorDocument12 pagesHW Monitorsorbciren10No ratings yet
- IMMOOPELDocument1 pageIMMOOPELGustavo RamosNo ratings yet
- Immo OpelDocument1 pageImmo OpelgsmhelpeveshamNo ratings yet
- Owl Forest Embroidery - Christmas Bears (Free)Document6 pagesOwl Forest Embroidery - Christmas Bears (Free)kittikoposdiNo ratings yet
- Immo Scoda Fabia 93C86Document3 pagesImmo Scoda Fabia 93C86Radu SopteaNo ratings yet
- HWMonitorDocument11 pagesHWMonitorAntonius BaskoroNo ratings yet
- Automatic P and F FinalDocument1 pageAutomatic P and F FinalValentine WallNo ratings yet
- Owl Forest Embroidery - Festive CactiDocument3 pagesOwl Forest Embroidery - Festive CactikittikoposdiNo ratings yet
- Ccie Routing Switching PDFDocument338 pagesCcie Routing Switching PDFBily OswenNo ratings yet
- PIC16F627A/628A/648A: 4.0 Memory OrganizationDocument7 pagesPIC16F627A/628A/648A: 4.0 Memory OrganizationDarilho Batista IgnacioNo ratings yet
- A Choral FanfareDocument5 pagesA Choral FanfareAdão RodriguesNo ratings yet
- Controle de Atendimento At'sDocument1 pageControle de Atendimento At'smilenaspinapsiNo ratings yet
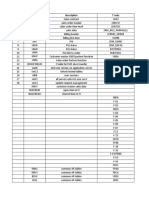
- TV5725 Register Map PDFDocument1 pageTV5725 Register Map PDFFernando PilatoNo ratings yet
- Rane ttm56Document7 pagesRane ttm56Oktay YuseinNo ratings yet
- Data ProtocolDocument11 pagesData ProtocolEri Wanto SihombingNo ratings yet
- 18f Cpe221 Test2 SolutionDocument6 pages18f Cpe221 Test2 SolutionKyra LathonNo ratings yet
- Last Secton AA MallDocument1 pageLast Secton AA MallSiver ImadNo ratings yet
- Practical No. 7 (A)Document16 pagesPractical No. 7 (A)Swapnil KansaraNo ratings yet
- 1998 TrainsDocument1 page1998 TrainsRon PzVIENo ratings yet
- Immo OpelDocument1 pageImmo Opelعلي ابزيزNo ratings yet
- Notes Cours. Sur La Finance Et La Mentalité Humaine Et SuperficielleDocument78 pagesNotes Cours. Sur La Finance Et La Mentalité Humaine Et SuperficielleYouriJJJNo ratings yet
- Ttm56sch With Missing PageDocument7 pagesTtm56sch With Missing PageAndy TaitNo ratings yet
- S3 PDFDocument1 pageS3 PDFIvy JonnaNo ratings yet
- Plano Hidraulico y Tabla de Presiones PDFDocument2 pagesPlano Hidraulico y Tabla de Presiones PDFmarceloNo ratings yet
- ING112A Grading Sheet 25787Document12 pagesING112A Grading Sheet 25787Ömer ŞentürkNo ratings yet
- Quitorio E2x Plate#5Document4 pagesQuitorio E2x Plate#5Hanna Quitorio100% (1)
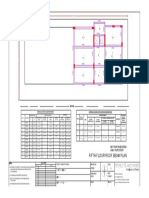
- First Floor Roof Beam PlanDocument1 pageFirst Floor Roof Beam PlanCMM INFRAPROJECTS LTDNo ratings yet
- FFG 7 PDFDocument14 pagesFFG 7 PDFaminNo ratings yet
- 23cmrxampl50db Schema en PrintDocument1 page23cmrxampl50db Schema en PrintfelipefreeNo ratings yet
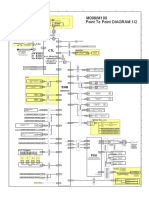
- M099/M100 Point To Point DIAGRAM 1/2: Scanner UnitDocument7 pagesM099/M100 Point To Point DIAGRAM 1/2: Scanner UnitHigor CunhaNo ratings yet
- Sdo Dates A.labh2p 009Document1 pageSdo Dates A.labh2p 009tulus sianturiNo ratings yet
- FoundationDocument55 pagesFoundationcisconotesNo ratings yet
- Radio & CD Player - P6L - SHi7cUTDocument2 pagesRadio & CD Player - P6L - SHi7cUTonlydarkheartNo ratings yet
- Fifth Floor Roof Beam PlanDocument1 pageFifth Floor Roof Beam PlanCMM INFRAPROJECTS LTDNo ratings yet
- FI TablesDocument6 pagesFI TablesSachin SinghNo ratings yet
- Project: SM Moa Block-4: Fcu Monitoring (VRF) As of May 25, 2021Document11 pagesProject: SM Moa Block-4: Fcu Monitoring (VRF) As of May 25, 2021Mark SorianoNo ratings yet
- MPMC Lab 3Document5 pagesMPMC Lab 3SIDHARTH A NARAYANANNo ratings yet
- Forms Overview Where Used EN FRDocument10 pagesForms Overview Where Used EN FR20051941No ratings yet
- Happy Xmas (War Is Over) - JOHN LENNONDocument4 pagesHappy Xmas (War Is Over) - JOHN LENNONPeter Armand Isidoor DerudderNo ratings yet
- Ampl 15 WDocument1 pageAmpl 15 WmplennaNo ratings yet
- Colf1 Colf2: Cod1 Cod2 Nlbpfa NLBPFBDocument8 pagesColf1 Colf2: Cod1 Cod2 Nlbpfa NLBPFBalimorshediNo ratings yet
- Biomass Feeder ManualDocument7 pagesBiomass Feeder ManualAlvinNo ratings yet
- 03-FGLT-A Unit Data SheetDocument10 pages03-FGLT-A Unit Data Sheetcvbc47jvmxNo ratings yet
- Footing Layout: FC1 FC2 FC3 FC4 FC5Document1 pageFooting Layout: FC1 FC2 FC3 FC4 FC5jayNo ratings yet
- Second Floor Wall Layout: A B C D E F G H I J KDocument1 pageSecond Floor Wall Layout: A B C D E F G H I J KTinkah MatiasNo ratings yet
- At-Hdvs-Cam ApiDocument14 pagesAt-Hdvs-Cam ApiDavid RosenbloomNo ratings yet
- CI-JBTAUX-2G Quick ManualDocument5 pagesCI-JBTAUX-2G Quick ManualhebrNo ratings yet
- Mchpfsusb Library HelpDocument883 pagesMchpfsusb Library Helpgem1144aaNo ratings yet
- Interfacing Keypad With PIC 16F877A MicrocontrollerDocument6 pagesInterfacing Keypad With PIC 16F877A MicrocontrollerEysha qureshi100% (1)
- PIC Microcontroller and Embedded Systems Muhammad Ali Mazidi, Rolin McKinlay and Danny CauseyDocument10 pagesPIC Microcontroller and Embedded Systems Muhammad Ali Mazidi, Rolin McKinlay and Danny CauseymuradportalNo ratings yet
- Elektor 1994 03 PDFDocument76 pagesElektor 1994 03 PDFsebastian maldonado0% (1)
- Microchip DsPIC30F DsPIC30F4011 Design Elements Revision Notes Microchip - Revision Notes 3Document8 pagesMicrochip DsPIC30F DsPIC30F4011 Design Elements Revision Notes Microchip - Revision Notes 3Florentin ChristianNo ratings yet
- Embedded Systems Books Tools PackDocument18 pagesEmbedded Systems Books Tools PackNirmal KumarNo ratings yet
- PIC12 (L) F1822/PIC16 (L) F1823 Data Sheet: 8/14-Pin Flash Microcontrollers With XLP TechnologyDocument436 pagesPIC12 (L) F1822/PIC16 (L) F1823 Data Sheet: 8/14-Pin Flash Microcontrollers With XLP TechnologyaliceNo ratings yet
- Security System Using RFID: A Project ReportDocument30 pagesSecurity System Using RFID: A Project Reportdnadar881No ratings yet
- Wireless Data Transfer Using PicDocument33 pagesWireless Data Transfer Using PicKrishnapriya BalakrishnanNo ratings yet
- PIC16F628ADocument178 pagesPIC16F628AEmanuele100% (1)
- PIC18F4550 Sleep Mode - PIC ControllersDocument4 pagesPIC18F4550 Sleep Mode - PIC ControllersKrishanu Modak100% (1)
- IJRA TemplateDocument9 pagesIJRA TemplateLuis VelascoNo ratings yet
- Sheet 3 Embedded System (CSE 315)Document5 pagesSheet 3 Embedded System (CSE 315)mohammedkhater013No ratings yet
- Introduction To Embedded SystemsDocument14 pagesIntroduction To Embedded SystemsSreekesh ManipuzhaNo ratings yet
- Micro Processors and Micro Controllers July 2023Document4 pagesMicro Processors and Micro Controllers July 2023Shanmukh VegiNo ratings yet
- 19ELC212 - MCA - Lab ManualDocument52 pages19ELC212 - MCA - Lab ManualVatsalya NagNo ratings yet
- 8259 PicDocument14 pages8259 PicRahul AshokNo ratings yet
- Pre-Eclampsia Risk Monitoring and Alert System Using Machine Learning and IoTDocument6 pagesPre-Eclampsia Risk Monitoring and Alert System Using Machine Learning and IoTBOHR International Journal on GynaecologyNo ratings yet
- MPLAB Tutorial Using Assembly Language For The PIC16F877 WitDocument23 pagesMPLAB Tutorial Using Assembly Language For The PIC16F877 WitPumzile FaleniNo ratings yet
- Embedded System LEC #04: © Dr. Ahmed MahrousDocument24 pagesEmbedded System LEC #04: © Dr. Ahmed MahrousThafer MajeedNo ratings yet
- AUTOMATIC SPEED BREAKER USING IoTDocument5 pagesAUTOMATIC SPEED BREAKER USING IoTProjects onlineNo ratings yet
- Final Year ProjectDocument45 pagesFinal Year ProjectMIRINDI DamienNo ratings yet
- Piccolino Manual: Installation of The Required Software, and Connection of The HardwareDocument55 pagesPiccolino Manual: Installation of The Required Software, and Connection of The HardwareAbhishek OjhaNo ratings yet
- Getting Started With I C Using MSSP On Pic18: View Code Examples On GithubDocument21 pagesGetting Started With I C Using MSSP On Pic18: View Code Examples On GithubPiezas Moldes CNCNo ratings yet
- Getting Started PIC16F84A Kit + PIC ProgrammerDocument5 pagesGetting Started PIC16F84A Kit + PIC Programmerelectron_glow100% (1)
- Embedded Systems: Govt Engg College ChamarajanagaraDocument22 pagesEmbedded Systems: Govt Engg College ChamarajanagaraParamesh H MNo ratings yet