Download as pptx, pdf, or txt
You might also like
- CSE 295 Lecture 3 - FunctionDocument40 pagesCSE 295 Lecture 3 - FunctionAtika AlamNo ratings yet
- Behavioral Patterns part-II Introduction Mediator Memento Observer State Strategy Template Method Visitor ReferenceDocument86 pagesBehavioral Patterns part-II Introduction Mediator Memento Observer State Strategy Template Method Visitor Referencemurali1622No ratings yet
- Assignment 1 Task and Guidelines CS230Document4 pagesAssignment 1 Task and Guidelines CS230Rav SharmaNo ratings yet
- Labview Academy: 12. Óra - Event, Property NodeDocument54 pagesLabview Academy: 12. Óra - Event, Property Node劉燕明No ratings yet
- 1 (20 Files Merged)Document20 pages1 (20 Files Merged)Krishan Pal SinghNo ratings yet
- OR LPM2 CHP 2 NewDocument85 pagesOR LPM2 CHP 2 NewmedrekNo ratings yet
- AI CT-1 2017-18 SolutionsDocument8 pagesAI CT-1 2017-18 SolutionsNEELAM RAWATNo ratings yet
- Chapter 6 - FunctionDocument6 pagesChapter 6 - FunctionRosihan Ari YuanaNo ratings yet
- Passing Package for IDsDocument7 pagesPassing Package for IDsyogado6055No ratings yet
- Course Introduction + Review QuestionsDocument27 pagesCourse Introduction + Review Questionseddy TNo ratings yet
- Observer ChainOfResponsibilityDocument23 pagesObserver ChainOfResponsibilityمحمد محمود محمد الاكحلNo ratings yet
- Concept Note - MCS3002-ITDocument2 pagesConcept Note - MCS3002-ITKavita SinghNo ratings yet
- Stone Geary Cobb Douglas PDFDocument19 pagesStone Geary Cobb Douglas PDFClassic PhyXNo ratings yet
- C++ NotesDocument32 pagesC++ NotesanujagrajNo ratings yet
- Programming Fundamentals Lab 05Document9 pagesProgramming Fundamentals Lab 05ABDUL WAHABNo ratings yet
- E190Q Lecture14 MotionPlanning PDFDocument72 pagesE190Q Lecture14 MotionPlanning PDFBara Abu ShaqraNo ratings yet
- Evolution of Various Programming ParadigmsDocument19 pagesEvolution of Various Programming ParadigmsNiveditaNo ratings yet
- CMP828 - AI - SolutionsDocument12 pagesCMP828 - AI - SolutionsOdunuga JuliusNo ratings yet
- HCSCI 132 Course Outline 2022Document4 pagesHCSCI 132 Course Outline 2022Munashe MuhwatiNo ratings yet
- AIML SyllabusDocument7 pagesAIML SyllabusOmkar MoreNo ratings yet
- Operational Research - Linear Programming Part IDocument55 pagesOperational Research - Linear Programming Part IIraguha FaustinNo ratings yet
- Today's Assignment: Principles of Autonomy and Decision MakingDocument10 pagesToday's Assignment: Principles of Autonomy and Decision Makingsaif mirNo ratings yet
- Scheme of Work - Data MiningDocument8 pagesScheme of Work - Data MiningAlia MaitahNo ratings yet
- Network analysis-CPM-5-6Document21 pagesNetwork analysis-CPM-5-6Haider Al-wzwazyNo ratings yet
- Unit - Ii: Software MeasurementsDocument61 pagesUnit - Ii: Software Measurementsnilesh chaudhariNo ratings yet
- CSE 109 Lecture 4Document45 pagesCSE 109 Lecture 4FarhanNo ratings yet
- UNIT4Document17 pagesUNIT4vedarajNo ratings yet
- AI A1 2023springDocument2 pagesAI A1 2023springSami AhmedNo ratings yet
- Object Oriented Analsys and DesignDocument3 pagesObject Oriented Analsys and DesignSrikarSriNo ratings yet
- T3 AC Business Computing-II Approved 2020-21Document10 pagesT3 AC Business Computing-II Approved 2020-21Rajat SinghNo ratings yet
- L07 - Conditional Execution - Part 2Document11 pagesL07 - Conditional Execution - Part 2aamirneyazi12No ratings yet
- 4 ProjectschedulingDocument21 pages4 ProjectschedulingarunlaldsNo ratings yet
- Appendix 2 - Chapter Questions - Project ManagementDocument10 pagesAppendix 2 - Chapter Questions - Project Managementअमित अम्बर गुप्ताNo ratings yet
- Oops NotesDocument122 pagesOops NotesrenjithrnathNo ratings yet
- Guest LectureDocument4 pagesGuest LectureavanigangNo ratings yet
- Intelligence Vs Artificial IntelligenceDocument29 pagesIntelligence Vs Artificial IntelligenceAkshit RathodNo ratings yet
- 02 OtDocument36 pages02 OtCharmi GanganiNo ratings yet
- Artificial Intelligence - SQPDocument12 pagesArtificial Intelligence - SQPviraatgargav6No ratings yet
- Software Project Management Lecture 8Document29 pagesSoftware Project Management Lecture 8Binte E KhalidNo ratings yet
- En SubjectDocument11 pagesEn SubjectJohan LitNo ratings yet
- AI MID SEM SuggestionsDocument15 pagesAI MID SEM Suggestionslhub911No ratings yet
- Searching Solver With Netlogo: Project 01 (Apcs)Document4 pagesSearching Solver With Netlogo: Project 01 (Apcs)Thiện TrầnNo ratings yet
- Jury Presentation: Sheikh M. Tadeeb AU19B1014 Sem-3Document26 pagesJury Presentation: Sheikh M. Tadeeb AU19B1014 Sem-3Sheikh Muhammed TadeebNo ratings yet
- NV Operating Systems UNITIIIDocument61 pagesNV Operating Systems UNITIIImayurikalaskar28No ratings yet
- Practical Experiences of Agility in The Telecom IndustryDocument10 pagesPractical Experiences of Agility in The Telecom IndustryAliNo ratings yet
- Proposal PDFDocument8 pagesProposal PDFmarcoNo ratings yet
- 2018 Winter OOP 3I - M - 22316 - CODocument26 pages2018 Winter OOP 3I - M - 22316 - CO14adisunnyNo ratings yet
- Chapter 05 Test Bank - Static - Version1Document45 pagesChapter 05 Test Bank - Static - Version1Veronica MargotNo ratings yet
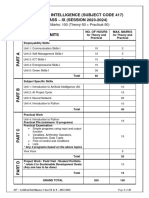
- AI Syllabus Class IX Subject Code-417 Session 2023-24Document8 pagesAI Syllabus Class IX Subject Code-417 Session 2023-24gonof46510No ratings yet
- Chapter Three 1Document21 pagesChapter Three 1Eyuel SintayehuNo ratings yet
- Summer Training CourseDocument20 pagesSummer Training CourseyourreddyNo ratings yet
- Programming in Python 2Document15 pagesProgramming in Python 2Yash pratap SinghNo ratings yet
- Ta Assignments: Problem Question From TA1 (q1 and q4)Document38 pagesTa Assignments: Problem Question From TA1 (q1 and q4)Iam anonymousNo ratings yet
- Unit 11 - Week 9: Assignment 9Document3 pagesUnit 11 - Week 9: Assignment 9akttripathiNo ratings yet
- Project Management Cpm/PertDocument19 pagesProject Management Cpm/PertabhivpcoeNo ratings yet
- ACFN 221, Ch. IIIDocument24 pagesACFN 221, Ch. IIITewodrose Teklehawariat BelayhunNo ratings yet
- Cs201 Midterm SubjectDocument14 pagesCs201 Midterm SubjectAzhar DogarNo ratings yet
- Model Answers Winter 2018Document26 pagesModel Answers Winter 2018kiritoblackswordsmen07No ratings yet
- Image Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningFrom EverandImage Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningNo ratings yet
- Prevention and ProtectionDocument9 pagesPrevention and ProtectionMarlon FordeNo ratings yet
- Development of Business Plan 4.1.1: Rafael Nieves John Paul Silanga John Dale VillaDocument8 pagesDevelopment of Business Plan 4.1.1: Rafael Nieves John Paul Silanga John Dale VillaNeighvestNo ratings yet
- Phytochemistry Lecture (4), 17/10/2012: "Volatile Oils" "Essential Oils" "Ethereal Oils"Document10 pagesPhytochemistry Lecture (4), 17/10/2012: "Volatile Oils" "Essential Oils" "Ethereal Oils"Bag VatiNo ratings yet
- A Study of Best Prctice of Schedulled Outage Program in Increase Plant PerformanceDocument28 pagesA Study of Best Prctice of Schedulled Outage Program in Increase Plant PerformanceYULIANTONo ratings yet
- Astm d4281Document5 pagesAstm d4281ciswandiNo ratings yet
- EPSE Sample Questions - Set 8 - Particle Model of MatterDocument12 pagesEPSE Sample Questions - Set 8 - Particle Model of MatterHUAWEI HUAWEINo ratings yet
- Chapter 4 IR ModelsDocument43 pagesChapter 4 IR ModelsTolosa TafeseNo ratings yet
- Iyanla Vanzant - Transcript TWS-2022Document28 pagesIyanla Vanzant - Transcript TWS-2022ArcobalenoNo ratings yet
- InterfaceDcsPmc A-90669E 02 061024Document4 pagesInterfaceDcsPmc A-90669E 02 061024Thiago SalesNo ratings yet
- MCC Dardenelle Trail LetterDocument3 pagesMCC Dardenelle Trail LetterSabrina BrennanNo ratings yet
- DC-40 CrystalDocument4 pagesDC-40 Crystaljavier govantesNo ratings yet
- Articulo 2 Bioseparations Basics-2014Document7 pagesArticulo 2 Bioseparations Basics-2014miguel terron mejiaNo ratings yet
- Importance of Soil Study in Civil EngineeringDocument6 pagesImportance of Soil Study in Civil EngineeringJack FosterNo ratings yet
- Ejosed CFP 2024Document2 pagesEjosed CFP 2024jluis_jorgeNo ratings yet
- A Technical Report On Industrial Training Done at NCAMDocument26 pagesA Technical Report On Industrial Training Done at NCAMRidwanullah AbdulrahmanNo ratings yet
- Pentens Industrial Flooring Solution NewDocument32 pagesPentens Industrial Flooring Solution Newウィリアムズ アンディNo ratings yet
- Brain Learning 8Document8 pagesBrain Learning 8Priscilla MelindaNo ratings yet
- Geospatial Application of Storm Surge VulnerabilityDocument36 pagesGeospatial Application of Storm Surge VulnerabilityDiego Acevedo FernandezNo ratings yet
- Faktor-Faktor Yang Berhubungan Dengan Kejadian Luka Dekubitus Akibat Penggunaan Alat Medis Di Ruang PicuDocument11 pagesFaktor-Faktor Yang Berhubungan Dengan Kejadian Luka Dekubitus Akibat Penggunaan Alat Medis Di Ruang PicuChensya SouisaNo ratings yet
- Universidad de Manila 5Document7 pagesUniversidad de Manila 5atornijoseNo ratings yet
- MTHS1008 2019-20Document5 pagesMTHS1008 2019-20Karim AbdelhadiNo ratings yet
- Material PropertiesDocument39 pagesMaterial Propertiesنرگس باویNo ratings yet
- Easy Harmony d22Document22 pagesEasy Harmony d22chili1974No ratings yet
- Consumer Perception Towards Green ProductsDocument9 pagesConsumer Perception Towards Green ProductsInternational Journal of Arts, Humanities and Social Studies (IJAHSS)No ratings yet
- Attachment 1-YICMG2024 Competition ThemeDocument5 pagesAttachment 1-YICMG2024 Competition Themevulananh838No ratings yet
- Effect of Cement Stabilization On Geotechnical Properties of Sandy SoilsDocument15 pagesEffect of Cement Stabilization On Geotechnical Properties of Sandy SoilsEdwardNo ratings yet
- Analog Elektronik - Konu 2Document8 pagesAnalog Elektronik - Konu 2Onur DündarNo ratings yet
- NSTP CTRL FDocument29 pagesNSTP CTRL FCherie QuintoNo ratings yet
- Chapter 8 Work and Kinetic EnergyDocument15 pagesChapter 8 Work and Kinetic Energygaram dikosNo ratings yet
- Gaug 2019 ApJS 243 11Document43 pagesGaug 2019 ApJS 243 11Vadym VoytsekhovskyNo ratings yet